 先楫半导体 HPM6000 系列常见的两种二级Bootloader 方案介绍
先楫半导体 HPM6000 系列常见的两种二级Bootloader 方案介绍

概 述
作为高性能、低功耗的嵌入式MCU产品,先楫半导体的HPM6000 系列产品广泛应用于多个领域。在嵌入式系统的开发中,Bootloader 常常是开发者可能会遇到的第一个技术难点。应用程序运行环境能否正确构建,内核能否启动成功,都取决于Bootloader 能否正确工作。一个功能完善的嵌入式系统,还需要Bootloader 能够实现系统OTA更新升级的能力,即除了usb烧录、串口烧录等方式外,还预留给客户通过以太网等方式实现快捷固件升级的窗口。
本文以HPM6450为例,基于HPM6000 系列产品嵌入式系统的硬件平台和RT—thread 软件平台,描述系统引导程序Bootloader 的设计思路,阐述了设计时需要考量的因素和遇到的技术难点及操作,希望能给大家一些启发。
二级boot方案思路分析
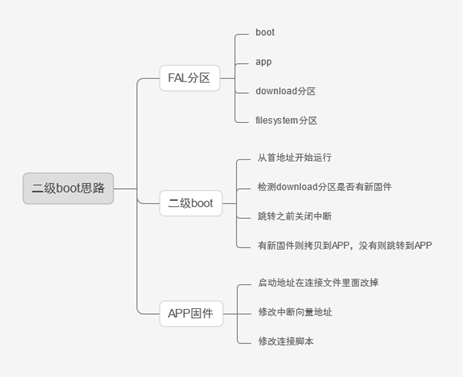
(图1:整体思路分析)
如上图所示,整个方案涉及3个部分:
FLASH空间的分区
二级boot
APP固件
因本次我们讨论的重点是“二级boot”,所以下文内容仅涉及前两部分。
1
FLASH空间的分区
HPM6700/6400系列的单片机和我们常用的stm32、at32这类的单片机最大的不同是该系列MCU 是通过 xpi 总线外挂外部FLASH,即代码存储在外部FLASH。
查阅芯片用户手册可知,该系列MCU支持通过 XPI0 或XPI1外挂FLASH(FLASH外挂方式,如图2所示)。
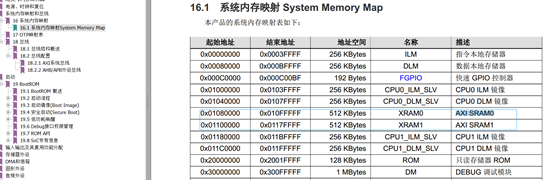
其中xpi0映射的地址空间是0x80000000,xpi1映射的地址空间是 0x90000000, CPU可对这两块地址空间直接寻址并运行代码(如图3所示)。
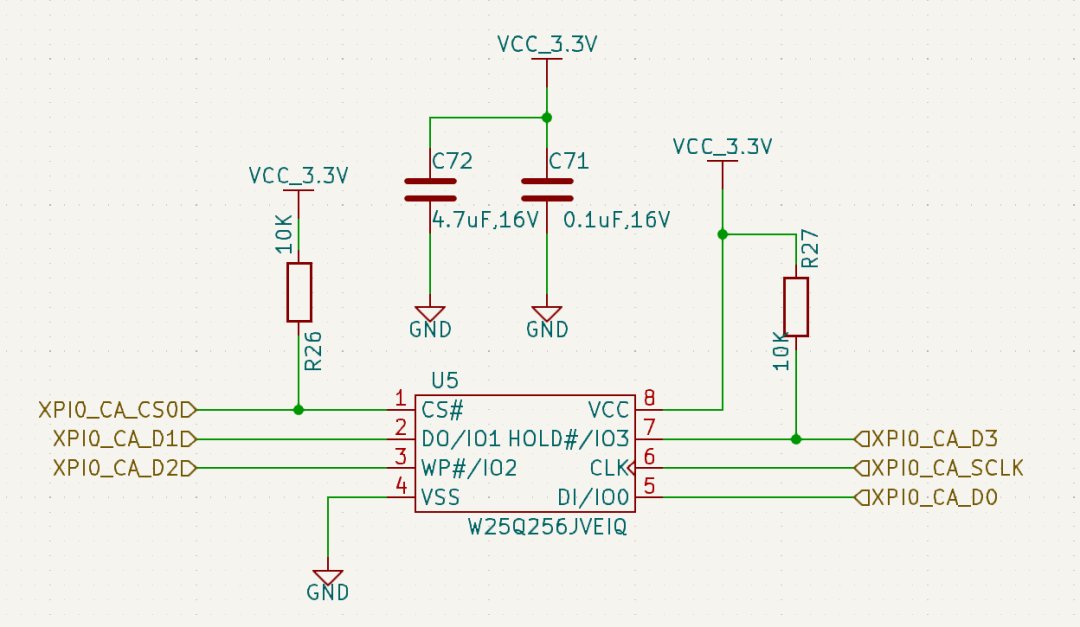
(图2:外部FLASH挂载于xpi0原理图)
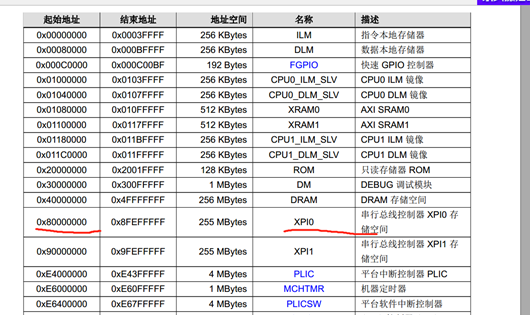
(图3:地址空间映射关系)
为实现固件升级,FLASH空间需要进行合理的划分,如Bootloader分区、用户程序分区、OTA升级分区、用户数据分区等。在RT-Thread上,FAL组件提供了方便的分区划分机制。
本文分享的两种方案均以W25Q256为例,该FLASH大小为32MB,挂载于XPI0外设上,首地址为0x80000000,通过FAL组件对FLASH的分区详情如下图所示:
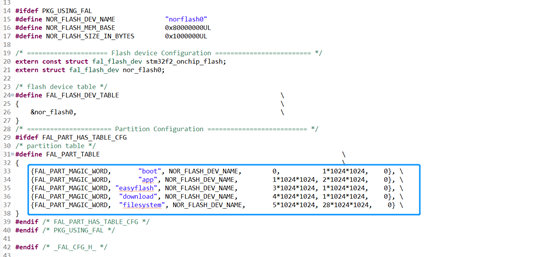
(图4:Flash 分区表)
注意,其中:
boot分区表示二级boot,该分区预留了1MB的存储空间,为未来的功能升级留足了空间。
app 分区可根据实际需要来分配大小,本方案中预留了1MB的空间。
download分区用于下载固件,在APP执行过程中,新固件通过OTA下载于该分区,并在重启后由boot分区的bootloader完成合法性检验和新固件升级操作。
Filesystem 分区用于实现文件系统,在此分区上面可以挂载littelfs格式文件系统,可以避免因频繁掉电导致数据丢失的问题。
Easyflash 分区可用于存储一些简单的参数等。
2
二级boot
二级boot由芯片BootROM引导,从芯片的用户手册可知:HPM6700系列支持多种启动方式,可到先楫半导体官网上查看“HPM6700/6400用户手册”的19.1内容部分,如下:
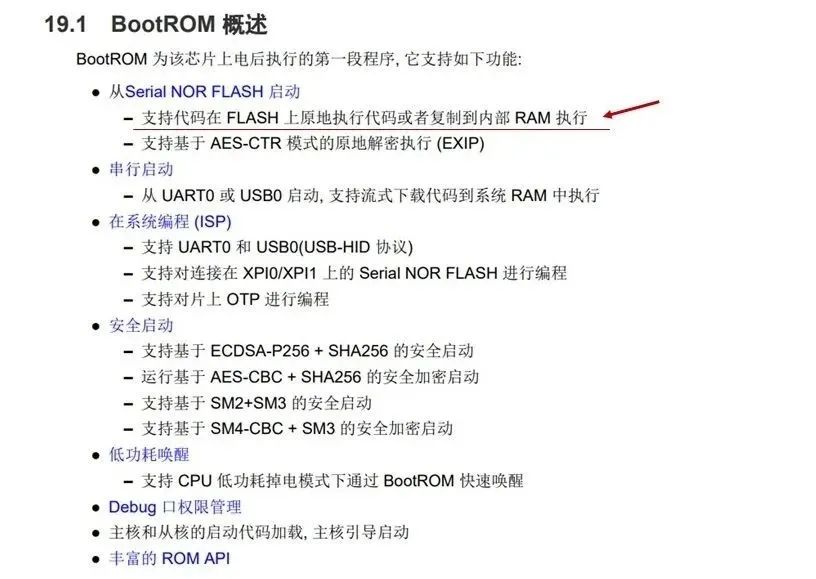
(图5:官方代码启动描述)
由上可知当从串行nor flash启动的时候,可支持“原地代码执行”和“拷贝到内部RAM”执行。“启动方式一” 表示代码存储在外部flash,并由CPU直接在flash上执行代码;“启动方式二” 表示代码存在flash里面,然后通过BootROM复制代码到内存后再执行。
受BootROM支持的两类启动方式的启发,笔者经过分析以及与官方的技术支持讨论得出如下结论:
采用FLASH原地执行的方式,系统可支持更大尺寸的应用程序,如支持GUI的应用。在cache的加持下,该方式可实现成本和执行速度的平衡。(需要注意的是:由于FLASH固有属性的限制(多数FLASH不支持RWW),在需要支持FLASH擦写的应用中,用户代码需要做一些防止产生RWW场景的保护。)
采用拷贝到RAM中执行的方式,可实现如下优势:
用户代码以更高的性能执行(RAM的随机访问性能优于FLASH)
规避了FLASH不支持RWW的限制,由于代码执行于RAM,在需要FLASH擦写的应用中逻辑会更简单。
考虑到HPM6700/HPM6400系列有高达2MB连续空间的RAM,若用户代码及代码所需要的RAM所占用的空间总和小于或等于2MB,“启动方式二” 是一种值得考虑的选择。
由于二级boot 同时支持以上两种启动方案,接下来,我们将针对每种方案分别进行讨论。
方案一:FLASH原地执行
在该方案下,app 在FLASH里执行。如上所述,app 存储于FLASH 1MB偏移处,需要将链接脚本中的FLASH首地址改为0x80100000。
需要注意的是,由于app是被二级 Bootloader 引导,因此应用程序中不应再携带用于 BootROM 引导识别的启动头(boot header)。
Boot 的 FLASH 脚本不改,最终跳转逻辑为:
Boot启动
检查download分区是否有新固件,如果有则拷贝到APP
关闭中断
跳转到0x80100000地址,就启动了APP。
这样就完成了二级boot的设计。
这里最关键的就是如何修改连接脚本。
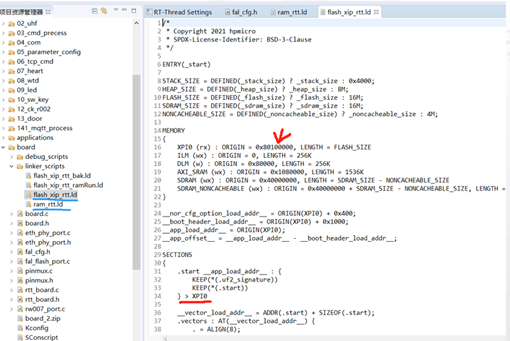
(图6:启动地址修改)
修改好app的链接脚本后,需要在boot里面进行跳转,跳转代码参考如下:
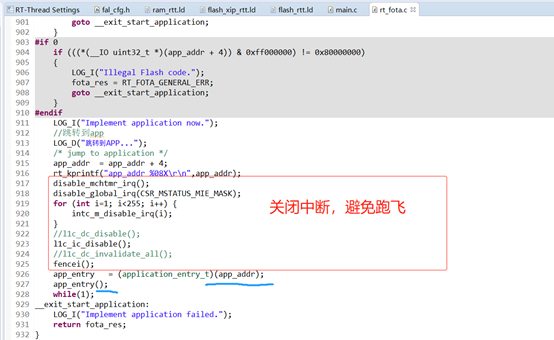
(图7:Boot 里跳转)
其中app_addr 为跳转偏移地址,如下:
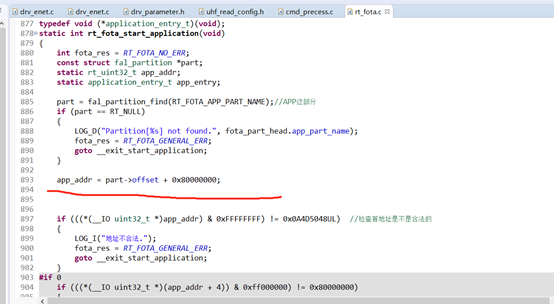
(图8:偏移地址计算)
二级boot完成App跳转后,App在FLASH中原地执行。该方案的优势是与复制到RAM相比,应用的尺寸可以大至数十MB。考虑到FLASH的固有限制(随机访问性能稍弱,不支持RWW等),当应用程序执行于FLASH上, 开发者需要注意以下几点:
对于需要高频执行的、对性能有要求的代码,用户程序需要将其复制到RAM中执行,否则会影响程序的效率(若cache未命中)。
若需要执行FLASH擦写操作,需要保证在FLASH擦写期间,没有程序或者其他外设访问FLASH(具体的实现方式有:关全局中断、关调度器等)。
完成FLASH擦写操作后,用户代码需要保证cache 一致性,否则可能会导致未预期的后果(如读到错误代码/数据)。
方案二:内存执行
若用户代码加代码所需的RAM总和小于2M,基于HPM6700/HPM6400有高达2MB的连续RAM,为规避FLASH固有限制带来的不便,产品可采用方案二,即:App本身在RAM中执行。启动过程中,二级boot将App复制到RAM中并中转到APP的目标地址执行。
(图9:内存系统描述)
采用该方案时,需要注意以下三点:
二级boot所使用的RAM不应和用户App所在RAM区域重叠,否则在拷贝中会产生错误。
二级boot在跳转到用户App前需要恢复中断到默认状态(关闭中断)。
boot采用flash link的编译方式,APP要采用ram link的编译方式,即APP是通过内存方式的链接脚本,因此APP编译后无法通过下载到flash的方式调试,必须使用USB或者其他的方式下载固件到0x80100000处。
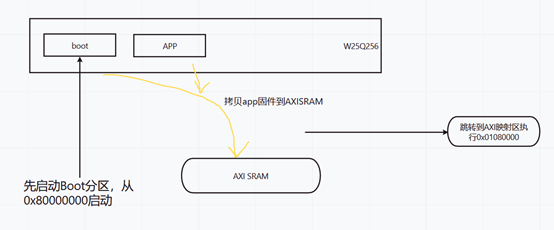
(图10:工作示意图)
以下为boot里面的链接修改,供大家参考:
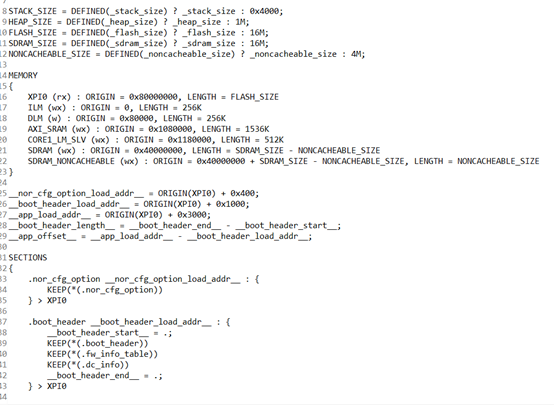
(图11:Boot链接脚本参考)
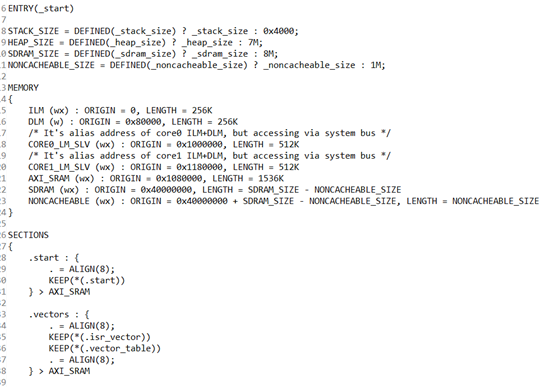
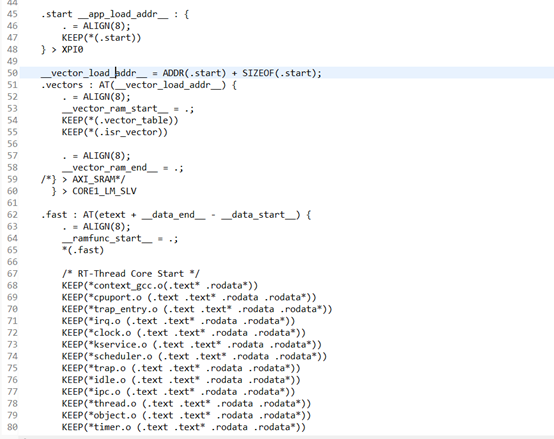
(图12:App ram link方式链接文件参考)
在方案二中,二级boot需要做的操作比flash boot的方式多了一个步骤,需要先将APP分区的代码拷贝至内存,然后再跳转至内存执行。
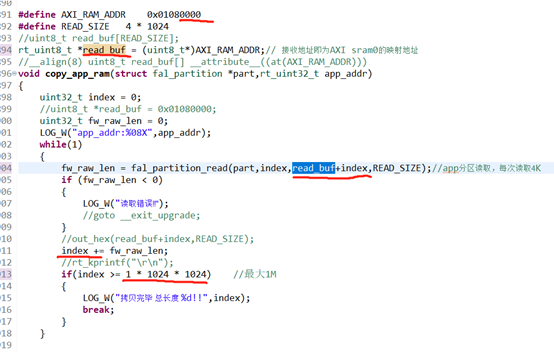
(图13:代码拷贝至内存)
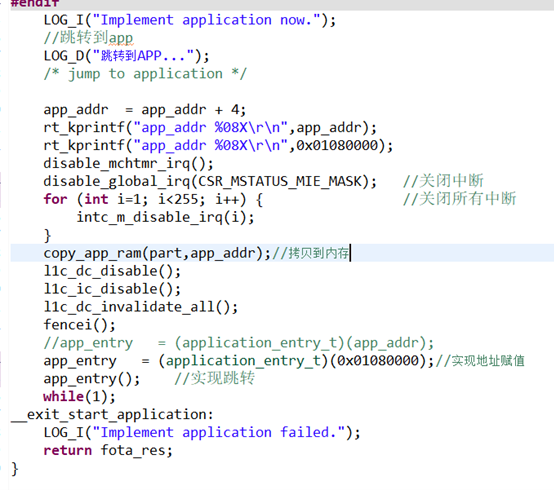
(图14:代码跳转至内存执行)
注意跳转前,需要关闭各种中断。

(图15:运行效果示意图)
3
注意事项
选择链接脚本时,要注意看左侧的链接脚本是否正确,如下图所示:
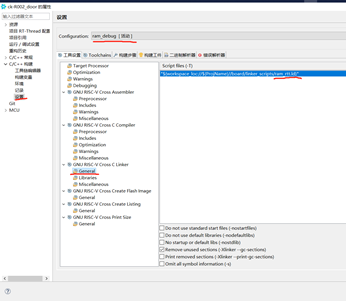
(图16:链接脚本示意图)
如果链接脚本不能执行,请检查下图的设置。
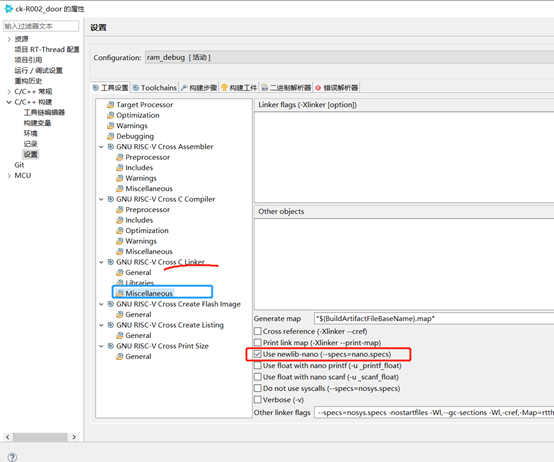
(图17:勾选newlib-nano)
编译的时候,需要把nerlib-nano勾选上,否则当使用memcpy的时候,有可能会出现 “非法指令” 的错误。
-
mcu
+关注
关注
147文章
19175浏览量
404943 -
半导体
+关注
关注
339文章
31320浏览量
266984 -
嵌入式
+关注
关注
5210文章
20695浏览量
337617 -
先楫半导体
+关注
关注
12文章
292浏览量
3392
发布评论请先 登录
三城联动圆满收官!先楫“芯”驱动机器人运动控制全链路落地

喜报!祝贺先楫半导体获得国家级高新技术企业认证
CES2026:先楫半导体隆重推出HPM5E3Y,打造机器人运动控制芯片阵容

先楫半导体荣膺“年度优秀AI机器人创新产品奖” | “芯”动力赋能产业升级

先楫半导体获浦东产业基金战略投资,深入布局机器人赛道创“芯”领域
先楫半导体高性能MCU入驻立创商城,国产芯势力再添新动能
先楫半导体HPM6E8Y:先楫实时控制芯片驱动的机器人关节“芯”时代




评论