 还可以这样实现ARM+ROS(机器人操作系统)
还可以这样实现ARM+ROS(机器人操作系统)

如何低成本搭建ARM+ROS的硬件载体?本文将为读者提供一个全新的技术方案。全文分概述、硬件与底层、ROS搭建三个章节,敬请订阅。
1.ROS简介
ROS是机器人操作系统(RobotOperatingSystem)的英文缩写,是用于编写机器人软件程序的一种具有高度灵活性的软件架构,其原型源自斯坦福大学的StanfordArtificialIntelligenceRobot(STAIR)和PersonalRobotics(PR)项目。

ROS是一个用于实现机器人编程和开发复杂机器人应用程序的开源软件框架,依托于Linux之类的操作系统上,所以ROS也被称为元操作系统或中间件软件框架。ROS提供了各类成熟的功能包,如:摄像头驱动、OpenCV图像处理、SLAM建图导航等。功能包中的代码可以是C++、Python、Octave等不同的编程语言编写,虽然不同模块基于不同语言编写,但仍可以被ROS组合起来一起使用。这意味着,当开发新款机器人时,开发者不需要做基础的传感器驱动、甚至不必实现某些应用,直接调用ROS自带的功能包,同时ROS是分布式架构,对于大型复杂机器人而言,可以把各个功能分别部署在不同控制板上。

2.硬件介绍
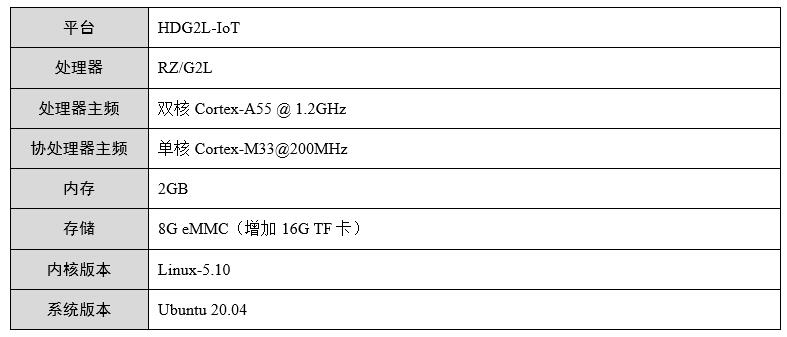
本文档使用本司的HDG2L-IoT评估套件来实现ROS应用环境,硬件产品如下所示。

硬件平台环境条件如下所示:
表2.1硬件平台资源
3.技术总结
目前实现ROS的方式主要有两种:
Ubuntu系统+ROS;
Ubuntu系统+docker+ROS镜像;
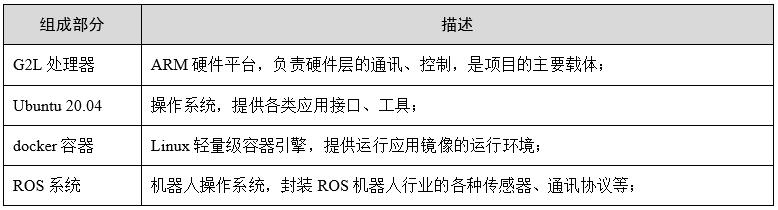
相对而言,使用dockers运行ROS镜像的部署方式,可以大大加快设备部署、移植工作。第二章节也将基于方案2去实现ROS,组成项目的各个部分功能如下所示:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ARM
+关注
关注
135文章
9499浏览量
388791
发布评论请先 登录
相关推荐
热点推荐
探索RISC-V在机器人领域的潜力
运行ROS 2,充分证明了RISC-V架构完全有能力承载机器人操作系统这样的复杂软件栈。它不仅是学习RISC-V的绝佳工具,更是探索未来边缘计算和智能
发表于 12-03 14:40
NVIDIA助力新一代机器人开发开源框架
今年的 ROSCon 在新加坡举办,并于 10 月 29 日顺利闭幕。大会吸引了全球机器人操作系统(ROS)领域开发者的关注。ROS 是目前全球应用最广泛的
全国首个开源鸿蒙机器人操作系统 M-Robots OS 正式开源
机器人操作系统M-RobotsOS,推动机器人行业生态融合、能力复用、智能协同。构建机器人共通语言解决产业协同难题机器人行业正面临两大关键挑

鸿道Intewell操作系统:人形机器人底层操作系统
操作系统的实时性赋能东土科技的鸿道(Intewell)工业操作系统作为国内唯一通过汽车、工业控制、医疗、轨道交通四项功能安全认证的系统,为标准体系中的技术层架构提供了底层支持。其微内核虚拟化架构可将人形
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
2的cv_bridge库,可以轻松实现ROS图像消息与OpenCV格式的转换,这在实际开发中极为便利。
视觉巡线与二维码识别的应用
视觉巡线是机器人自主导航的经典案例,书中从仿真到
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
的知识,还需要对ROS 2的节点通信和数据处理有一定的了解。通过实践这一部分内容,我掌握了如何在ROS 2中实现二维码识别,这对于提高机器人的智能性和交互性具有重要意义。
地图构建:S
发表于 04-27 11:42
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
讲解了如何在 ROS 2 中实现机器人的运动控制,包括速度控制、位置控制等。通过编写运动控制节点,可以接收来自上层的控制指令,如速度指令或目标位置指令,然后通过底层的驱动程序控制
发表于 04-27 11:24
深开鸿推出全国首个基于开源鸿蒙的机器人操作系统
在智能制造浪潮的推动下,机器人已成为工业升级的核心驱动力。然而,操作系统作为机器人产业的“魂”,直接决定了机器人的智能化水平、协同能力和生态扩展性。长期以来,
全国首个基于开源鸿蒙的机器人操作系统M-Robots OS正式发布,中国机器人产业进入“群体智能”新时代
2025年4月9日,深开鸿在广东省人工智能与机器人产业创新产品与服务新闻发布会上正式发布全国首个基于开源鸿蒙的分布式异构多机协同机器人操作系统——M-RobotsOS(Multi-RobotsOS
鸿道AI机器人操作系统亮相中关村论坛
目前,鸿道操作系统已广泛应用于我国飞机、高铁、汽车、船舶、电网电力、数控机床、工业机器人、数字工厂等领域。与此同时,东土科技成功发布 AUTBUS 国际标准,并孵化出全球首颗AUTBUS总线芯片

名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
机器人、家用娱乐机器人,大到智能驾驶汽车、人形机器人,都是未来会并存的机器人形态。
不过,当年遵循“提高机器人软件复用率”思想开发的
发表于 03-03 14:18
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】+初品的体验
的快速发展,相关人才的需求也在不断增加,通过阅读该书可以帮助大家系统性地了解和分析当前具身智能机器人系统的发展现状和前沿研究,为未来的研究和开发工作提供指导。此外,本书
发表于 12-20 19:17





 工商网监
工商网监
评论