 【开源汇总】开源DIY-四轴飞行器/瓦力机器人/GB游戏机/履带机器人
【开源汇总】开源DIY-四轴飞行器/瓦力机器人/GB游戏机/履带机器人

本文章为开源硬件项目分享汇总,各位小伙伴联系社区助理,提供相关电子设计作品,积极分享自己的开源项目经历哦~
大神的毕业设计-履带四足复合机器人
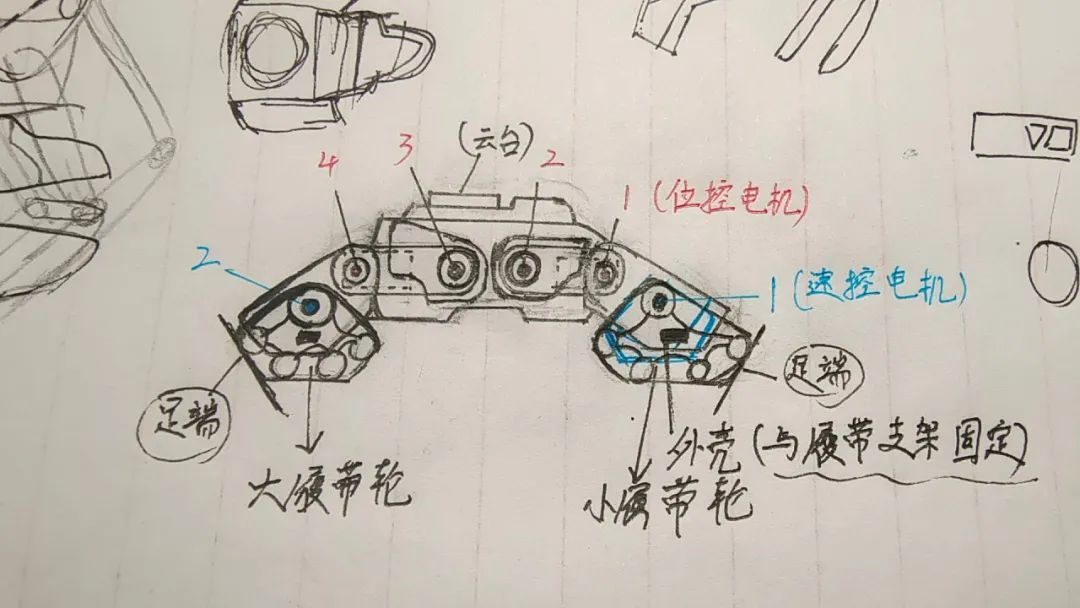
作者:PCBguy
芯片:ESP32-WROVER-E
项目简介:本项目中,履足式复合机器人拥有两种行进模式:四足行进模式、履带行进模式,应对不同场景及地形时能够切换形态。四足形态下整体总共拥有8个自由度DOF,单腿各具备2个自由度DOF,足端结构融入了履带机构,各履带机构配备1个直流电机驱动。
✦
✦
STM32四轴遥控器
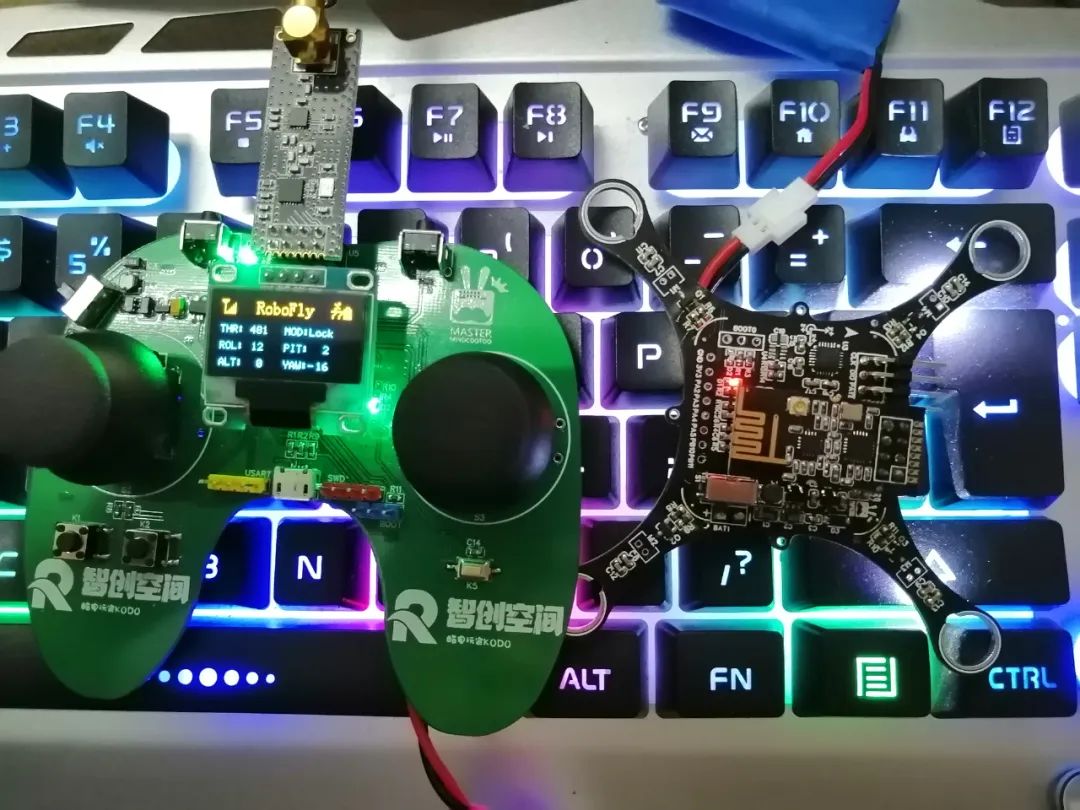
作者:酷电玩家
芯片:STM32F103C8T6
项目简介:基于小马哥RoboFly开源四轴软件平台设计的四轴遥控器,主控采用STM32F103C8T6,SI24R01无线通信四轴遥控器,实现OLED四轴姿态回传显示,电压回传显示,一键解锁功能等功能。
✦
✦
STM32四轴飞行器

作者:酷电玩家
芯片:STM32F103
项目简介:小马哥RoboFly开源四轴制作的四轴飞行器,新版的STM32四轴飞行器V3.0工程。功能实现:SI24R1 2.4G遥控,OLED实时显示四轴姿态,电压回传,可二次开发;STM32F103主控,集成MPU6050姿态传感器、ws2812B全彩指示灯等,预留可扩展接口。
✦
✦
大佬自制GameBoy游戏机
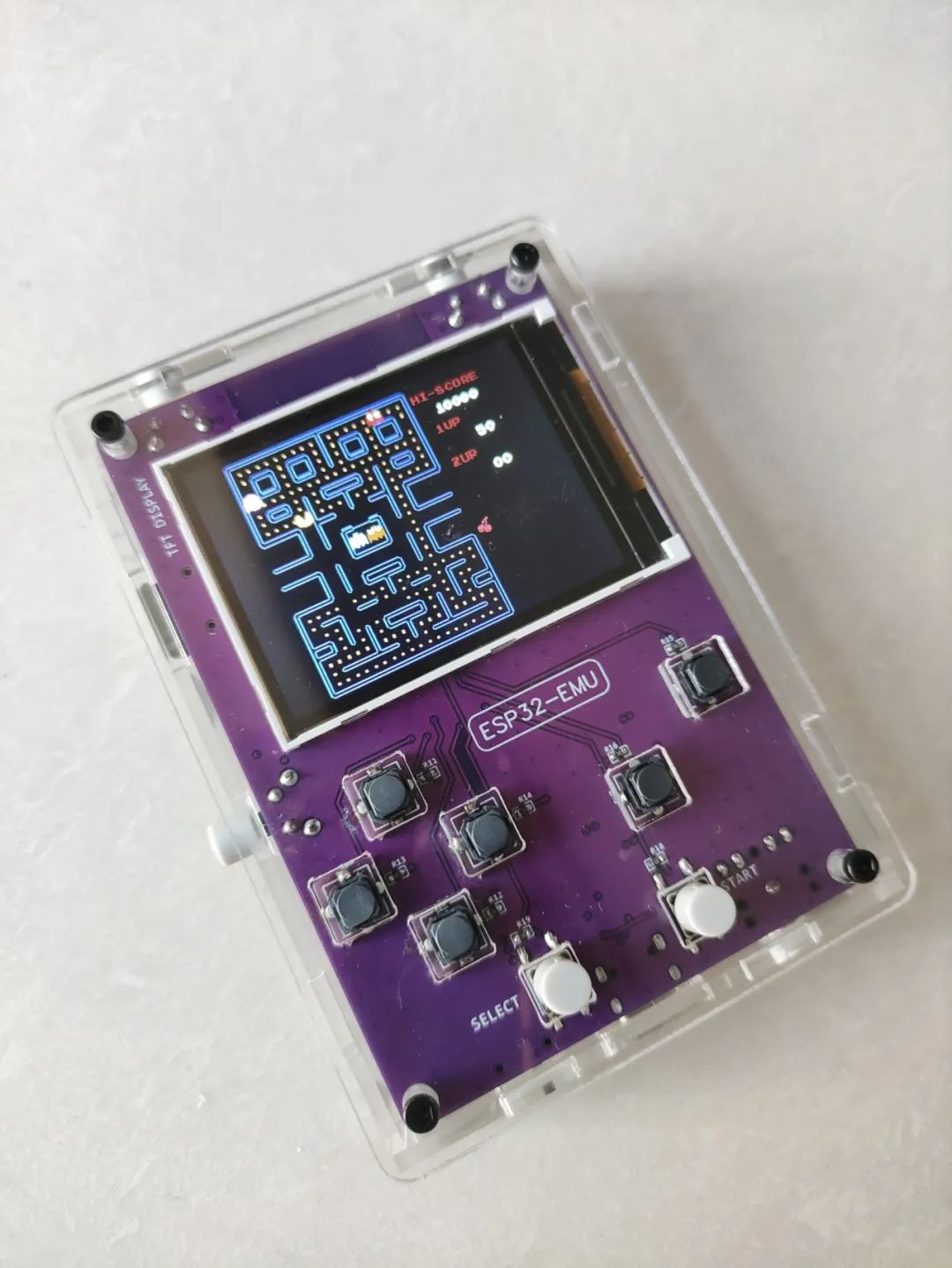
作者:高能小新
芯片:ESP32-EMU
项目简介:本工程基于esplay,在原作者的基础上修改了部分元件和电路,并重新绘制了PCB。
✦
✦
最简单DIY基于STM32的远程控制电脑系统

作者:daodanjishui
芯片:STM32F103ZET6
项目简介:ST公司STM32F103ZET6自带的鼠标控制电脑的方案,使用到正点原子战舰开发板和配套的4.3寸电容触摸屏,最终实现的是单片机的触摸屏鼠标控制的效果。
✦
✦
ESP32/STM32 电源系统设计
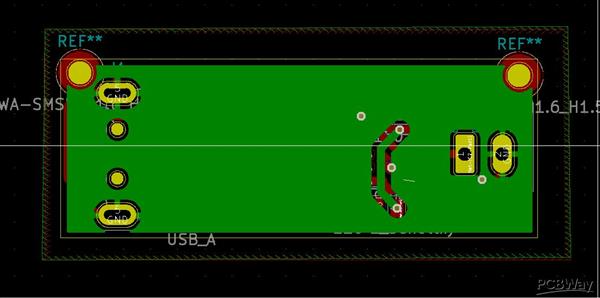
作者:study875
芯片:LM2594M
项目简介:在这个项目中,我将设计一个 ESP32/STM32 电源系统。通过研究,我注意到 ESP32 和 STM32 由 3V3 输出电源系统供电。对于这个项目,我们的输入将是一个通过 USB 端口的 5V 输入。
✦
✦
如果有想要分享经历的小伙伴
可以扫描下方二维码添加小助微信

加入交流群,领电子工程师项目资料
加群→发分享文章截图给管理员→领取资料
发烧友技术交流群
-
机器人
+关注
关注
213文章
30588浏览量
219597
发布评论请先 登录
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
开源鸿蒙驱动机器人与AI产业生态发展,M-Robots OS正式开源

工业机器人的特点
全国首个开源鸿蒙机器人操作系统 M-Robots OS 正式开源
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品






 工商网监
工商网监
评论