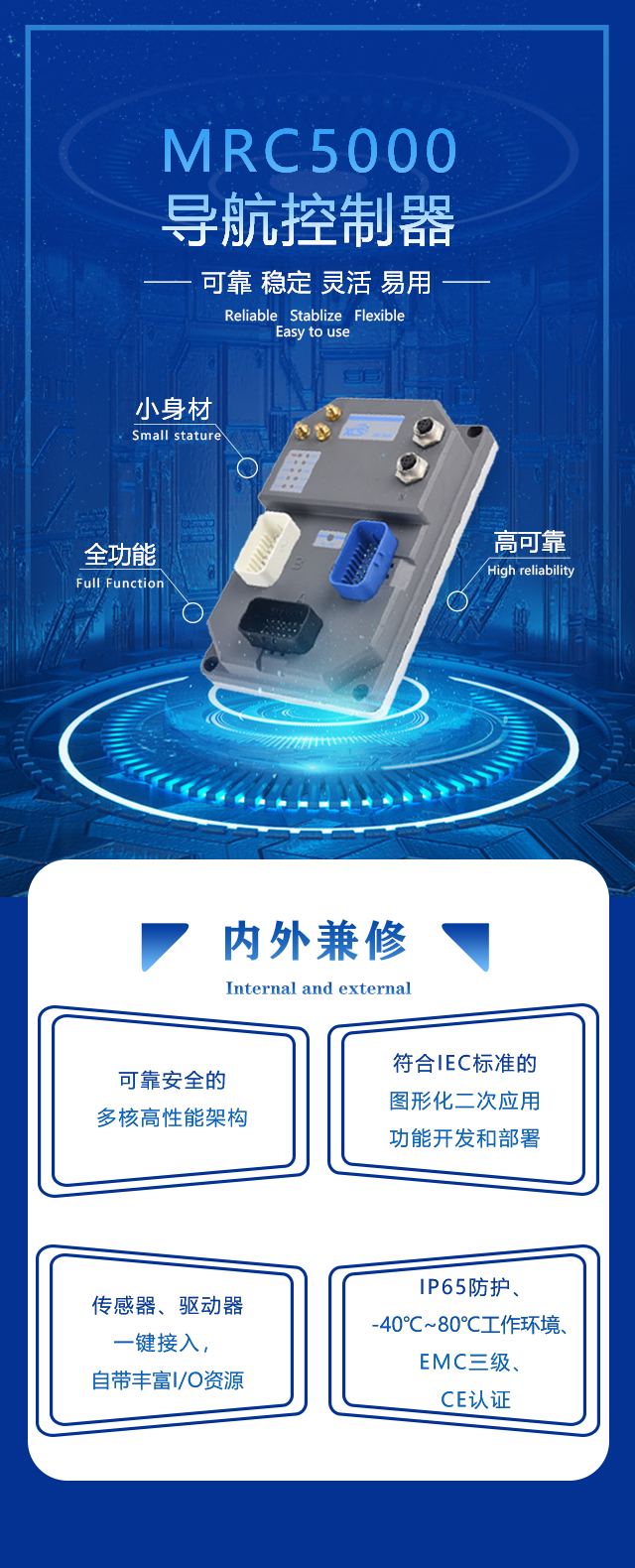
 「科聪」移动机器人导航控制器MRC5000 任时间考验,仍卓尔不群!
「科聪」移动机器人导航控制器MRC5000 任时间考验,仍卓尔不群!






声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
AMR
+关注
关注
3文章
365浏览量
29928 -
移动机器人
+关注
关注
2文章
718浏览量
33316 -
AGV
+关注
关注
26文章
1091浏览量
40600
发布评论请先 登录
相关推荐
移动机器人幕后的全能冠军——MRC5000
款经得起时间检验的控制器,移动机器人幕后的全能冠军——MRC5000,道一道它的“五千”故事。跨越千山万水MRC5000是科聪于2017年在

移动机器人的ROS导航堆栈技术手册
ROS 导航堆栈对于移动机器人从一个地方移动到另一个地方是强大的可靠。
导航堆栈的工作是通过处理来自测距、传感器和环境图的数据来产生让机器人
发表于 11-14 12:19
•409次阅读

基于Matlab和VR技术的移动机器人建模及仿真
,虚拟模型准确地模拟了真实移动机器人的动力学特征 ; 通过对模型的参数修改 ,为实现对真实机器人的最优控制和设计提供了可信的参考方案
发表于 09-20 06:24
带你从0了解移动机器人(五) ( 如何选择控制器类型)
。目前,移动机器人控制器主要控制机器人在工作空间中的运动位置、姿态和轨迹,操作顺序及动作的时间等。1控制
叉式移动机器人控制器产品使用说明书
FRC5000系列叉式移动机器人控制器,适用各类常见的叉式移动机器人,内置激光导航算法,支持单舵轮、双舵轮底盘运动模型。FRC
发表于 07-11 10:19
•4次下载
AMR移动机器人控制器产品使用说明书
MRC3100系列AMR移动机器人控制器,适用潜伏顶升式、协作(复合)式、辊筒式等差速底盘类型移动机器人,内置激光导航及二维码
发表于 07-11 10:16
•4次下载
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
:**位置准确,小巧玲珑,铺设、更换路径更容易,控制通讯方便,不必担心声光干扰。
03磁导航
磁导航的原理是在移动机器人(AGV/AMR)行驶路径上埋置金属线,给金属线加载
发表于 06-28 09:52
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
传感器数据获取环境信息,规划路径并选择最优路径到达目的地的算法。运动控制算法是指移动机器人在到达目的地后,根据传感器数据调整方向和速度的算法。这些算法需要在
发表于 06-28 09:36
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。基于整个智能制造的发

【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。

「车型分析」移动机器人控制系统典型应用车型 ——叉式移动机器人(AGV/AMR)
、灵活化、柔性化、低成本、高效率、安全作业等特性。1车型介绍叉式移动机器人(AGV/AMR)具备定位、导航和一定的自主决策能力,其主要由控制系统、驱动模块、工作模

【科普】干货!带你从0了解移动机器人(二)—— 移动机器人硬件组成
协同工作才能实现机器人的自主移动。下面将详细介绍移动机器人的硬件组成,从传感器、运动控制到交互模块都在其范畴内。 1、控制系统:

因为专注 所以专业 | 科聪移动机器人专用控制器重磅来袭
广泛、体积更小巧,使用更方便。 MRC3100AMR移动机器人控制器: FRC5000叉式移动机器人






 工商网监
工商网监
评论