 CVPR 2023最佳论文候选!真实高精3D物体数据集OmniObject3D
CVPR 2023最佳论文候选!真实高精3D物体数据集OmniObject3D

导读
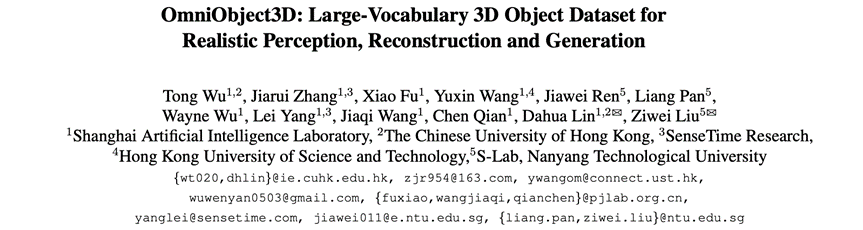
为了促进真实世界中感知、重建和生成领域的发展,我们提出了 OmniObject3D,一个高质量的大类别真实三维物体数据集。本数据集有三个主要优势:1)类别丰富:覆盖 200 余个类别的约 6K 个三维物体数据;2)标注丰富:包括了高精表面网格、点云、多视角渲染图像,和实景采集的视频;3)真实扫描:专业的扫描设备保证了物体数据的精细形状和真实纹理。
OmniObject3D 是目前学界最大的真实世界三维扫描模型数据集,为未来的三维视觉研究提供了广阔的空间。利用该数据集,我们探讨了点云识别、神经渲染、表面重建、三维生成等多种学术任务的鲁棒性和泛化性,提出了很多有价值的发现,并验证了其从感知、重建、到生成领域的开放应用前景。我们希望 OmniObject3D 以及其对应的 benchmarks 能够为学术研究和工业应用带来新的挑战和机会。作为 CVPR 2023 的投稿,我们收到了 4 位审稿人的一致满分评价,并获推CVPR Award Candidate(top 12 / 9155)。
论文名称:
OmniObject3D: Large-Vocabulary 3D Object Dataset for Realistic Perception, Reconstruction and Generation
背景介绍
面向真实 3D 物体的感知、理解、重建与生成是计算机视觉领域一直倍受关注的问题,也在近年来取得了飞速的进展。然而,由于社区中长期缺乏大规模的实采 3D 物体数据库,大部分技术方法仍依赖于 ShapeNet[1] 等仿真数据集。再者,仿真数据与真实数据之间的外观和分布差距巨大,这大大限制了它们在现实生活中的应用。
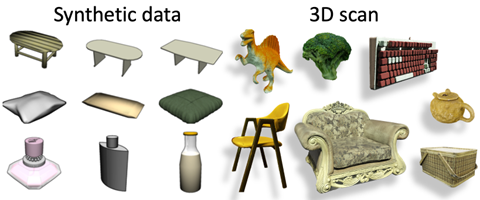
为了解决这一困难,近年来也有一些优秀的工作如 CO3D[2] 等从视频/多视角图片中寻求突破点,并利用 SfM 的方式重建 3D 点云,然而这种方式得到的点云往往难以提供完整、干净、精准的 3D 表面和纹理。因此,社区迫切需要一个大规模且高质量的真实世界 3D 物体扫描数据集,这将有助于推进许多3D视觉任务和下游应用。
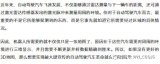
仿真数据与真实扫描数据的对比:仿真数据的纹理和几何往往比较简单且失真。
多视角图片重建点云与真实扫描数据的对比。重建点云往往含有噪声,且无法恢复精细的表面与纹理,在没有拍摄到的位置存在大面积空洞。
数据集特点
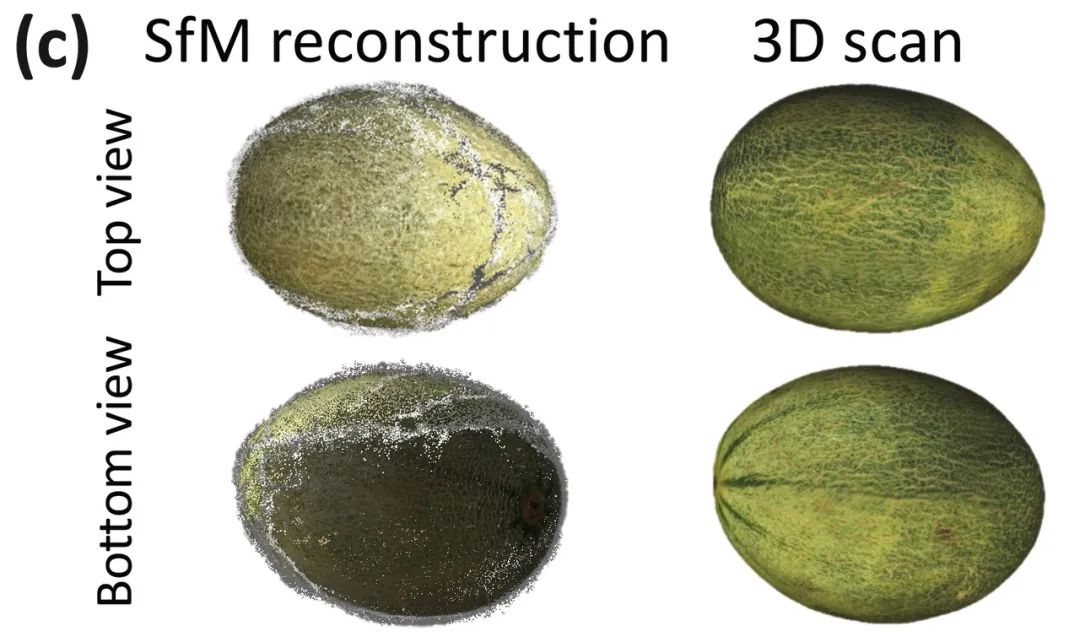
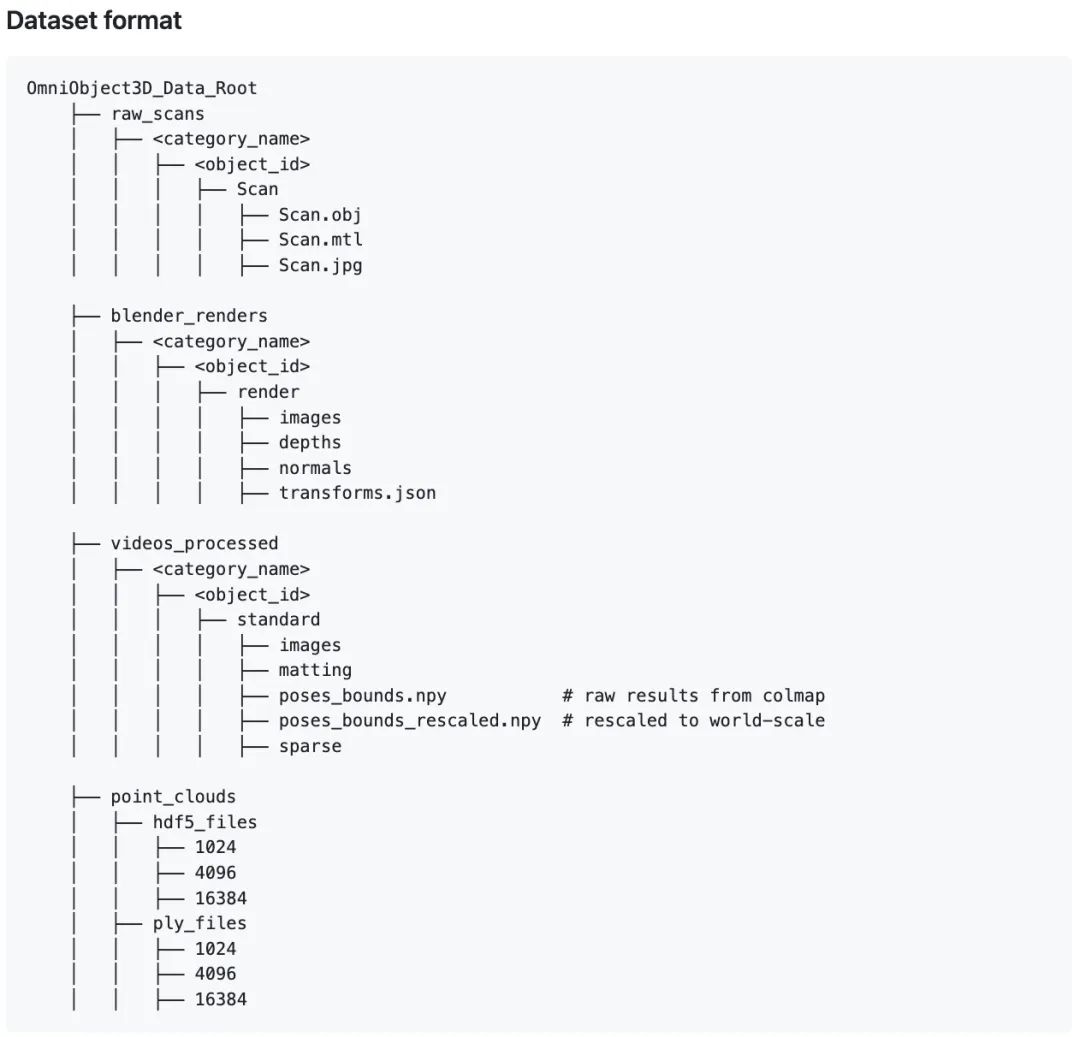
OmniObject3D 为每一个物体提供了四种模态信息,包括:带纹理的高精模型、点云、多视角渲染图像、实景拍摄的环绕视频。对于每个拍摄的视频,我们平均抽取了 200 帧,并提供前景掩码和 SfM 重建的相机位姿和稀疏点云。
模态示例
文件层级
数据集的整体类别内物体数量呈长尾分布,与 ImageNet[3]、COCO[4]、LVIS[5] 和 ShapeNet[1] 等热门 2D 及 3D 数据集中的常见类别有高度共享。

每个类别内物体数量分布图
下游应用
OmniObject3D 为学界带来了广泛的探索空间,在本文中,我们选取了四个下游任务进行评估与分析。
任务一:
点云分类鲁棒性(Point Cloud Classification Robustness)
物体点云分类是 3D 感知中最基本的任务之一。在本节中,我们展示了 OmniObject3D 如何通过解耦 out-of-distribution styles & out-of-distribution corruptions 来实现更全面的点云分类的鲁棒性分析。
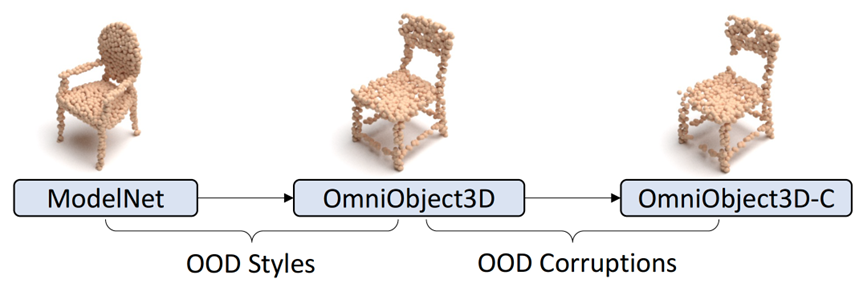
OmniObject3D 提供了一个干净的真实世界物体点云数据集,使得能够针对 OOD styles & OOD corruptions 的鲁棒性进行细粒度分析。
具体来说,1)CAD 模型与真实扫描模型之间的差异引入了 OOD styles;2)常见点云破坏因子产生了 OOD corruptions。
在之前的研究工作中,含噪的真实物体数据集如 ScanObjectNN[6] 将两种情况藕合起来,无法实现解耦分析;主动加入破坏因子的仿真数据集如 ModelNet-C[7] 则仅仅反映了第二种情况。OmniObject3D 则具备将两种情况解耦分析的要素。
我们对十种最常见的点云分类模型进行了测试,并揭示了其与 ModelNet-C 数据集中结论的异同。在应对这两个挑战时,如何实现一个真正鲁棒的点云感知模型仍需更加深度的探索。
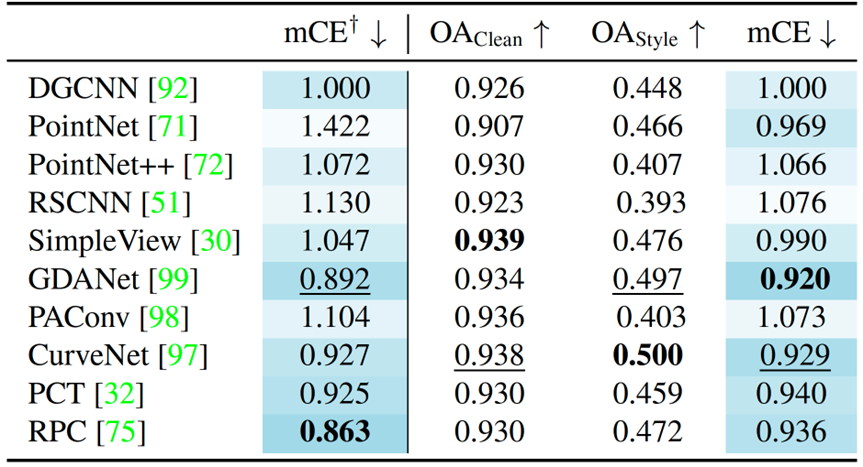
点云分类鲁棒性实验结果

任务二:
新视角合成(Novel View Synthesis)
自 NeRF[8] 提出以来,新视角合成一直是领域内的一个热门方向。
我们在 OmniObject3D 上研究了两种赛道下的新视角合成方法:
1)利用密集视角图片输入,对单一场景进行优化训练;
2)挖掘数据集中不同场景之间的先验,探索类 NeRF 模型的泛化能力。
首先,对于单场景优化的模型,我们观察到基于体素的方法会更加擅长建模高频纹理信息,而基于隐式模型的方法则相对更能抵抗表面凹陷或弱纹理等容易产生几何歧义的情况。
数据集中物体多变而复杂的形状和外观为这项任务提供了一个全新的评估基准。
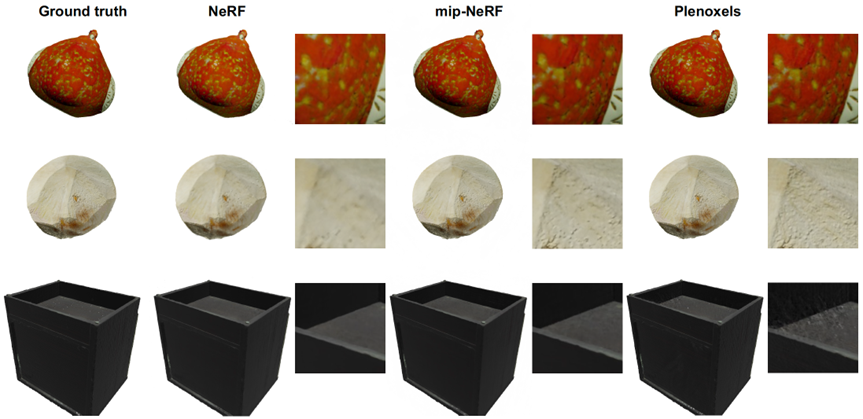
多个常见方法的单场景优化效果示例
相对于拟合的单个场景的模型,跨场景可泛化框架在本数据集上的表现则更令人期待。网络从很多同类别、甚至跨类别的数据中学习到可以泛化的信息,即可对于一个全新场景的稀疏视角输入做出新视角预测。
实验表明,作为一个几何和纹理信息丰富的数据集,OmniObject3D 有助于促使模型学到对新物体或甚至新类别的泛化能力。

泛化性模型效果示例
任务三:
表面重建(Surface Reconstruction)
除了新视角合成外,如果能恢复物体的显式表面,将更加有助于下游应用的开发。同时,我们的数据具备精准且完整的三维表面,能够充分支持表面重建精度的评测需要。
类似的,我们也为表面重建任务设置了两条赛道:
1)稠密视角采样下的表面重建;
2)稀疏视角采样下的表面重建。
稠密视角下表面重建结果展示了数据集内几何形状的显著多样性。精准的扫描使得我们能够使用 Chamfer Distance 作为重建精度的度量。将类别划分为三个“难度”等级,可以观察到所有方法在不同等级上的结果存在明显的差距。
与仅包含 15 个场景的标准 DTU[9] 基准相比,我们的数据集在这项任务上提供了更全面的评估结果。
稠密视角表面重建示例
稀疏视图表面重建是一个更具挑战性的任务,在所有方法的结果中我们都观察到了明显瑕疵,均未达到能够满足实际应用的水平。
除了专为稀疏视角表面重建设计的方法外,我们还评估了前面提到的泛化性新视角合成模型的几何恢复能力——数据集提供的精准 3D Ground Truth 在评测中再次发挥了优势,然而他们的表现同样无法令人满意。
综上所述,这个问题的探索空间仍然巨大,而 OmniObject3D 为该领域进一步的研究提供了扎实的数据基础。
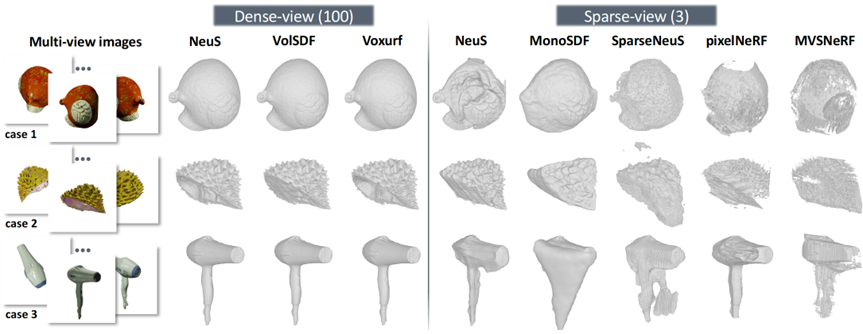
稠密和稀疏视角表面重建效果示例
任务四:
3D 物体生成(3D Object Generation)
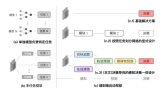
除了重建之外,OmniObject3D 还可以用来训练真实 3D 物体的生成模型。我们采用 GET3D[10] 框架同时生成形状和纹理,并尝试使用单个模型从数据集中同时学习多种类别的生成。

带纹理的 3D 物体生成
通过在隐空间插值,可以观察到生成模型跨类别变化的特性。我们在文章中还着重探讨了由于训练数据不平衡导致的生成语义分布失衡特点,详细请参考论文。

形状和纹理低维隐码插值结果
未来工作
关于数据集本身,我们会致力于不断扩大和更新数据集以满足更广泛的研究需求。除了现有的应用,我们还计划进一步发展其他下游任务,如 2D / 3D 物体检测和 6D 姿态估计等。除了感知和重建任务外,在 AIGC 时代,我们相信 OmniObject3D 能够在推动真实感 3D 生成方面发挥至关重要的作用。
-
3D
+关注
关注
9文章
3022浏览量
115561 -
数据集
+关注
关注
4文章
1240浏览量
26261 -
AIGC
+关注
关注
1文章
393浏览量
3270
原文标题:CVPR 2023最佳论文候选!真实高精3D物体数据集OmniObject3D
文章出处:【微信号:CVer,微信公众号:CVer】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
下一站创新:3D显示屏、3D物体识别技术?
基于深度学习的方法在处理3D点云进行缺陷分类应用

3D扫描的结构光
浩辰3D的「3D打印」你会用吗?3D打印教程
基于3D打印的原理及应用
自动驾驶的核心基础在高精3D地图
探讨高精3D地图对无人驾驶汽车的重要性
3D技术在全方位汽车立体监视系统中应用
自动驾驶检测器可同时实现3D检测精读和速度的提升
NVIDIA 3D MoMa:基于2D图像创建3D物体
3D点云数据集在3D数字化技术中的应用
【3D形状分析利器】3D扫描应用案例集分享

创造历史!商汤联合团队斩获CVPR最佳论文,推出首个“感知决策一体化”自动驾驶通用大模型
Nullmax提出多相机3D目标检测新方法QAF2D




评论