 基于无人机高光谱遥感的水稻氮营养诊断方法-莱森光学
基于无人机高光谱遥感的水稻氮营养诊断方法-莱森光学

引言
氮素是对作物生长、发育,以及最终产量影响最明显的元素,其含量变化会对光合作用、蛋白质合成以及碳氮代谢产生影响。氮素的缺乏会抑制作物地上部分和根系的生长,限制繁殖器官的形成和发育,并显著影响作物最终产量以及品质 。因此,快速、精准、大面积地对水稻田间氮素需求情况进行诊断,并依据诊断结果实现精准施肥,是实现水稻田间精准管理和保证水稻产量的重要手段。传统的水稻氮营养诊断标准主要基于临界氮浓度曲线。氮营养指数作为作物氮营养诊断的重要指标,能够定量描述作物的氮营养丰缺状况,为作物氮亏缺量的确定提供了理论依据。
近年来,随着高光谱遥感技术的发展,利用无人机高光谱遥感技术获取水稻氮营养状况信息成为精准农业领域的重要发展方向。高光谱遥感技术能够通过分析作物光谱数据来获得其生长信息,具有快速、无损、准确等优点。对此,国内外已在相关领域取得一定的研究进展。这些研究大多数集中在利用高光谱对水稻氮含量进行反演,而单纯的氮含量信息难以反映水稻的氮营养丰缺状况,因此,结合无人机高光谱遥感技术与临界氮浓度曲线理论,通过光谱反演氮营养指数的形式对水稻进行氮营养诊断成为当前的研究热点 。前人研究大都以对水稻进行氮营养诊断为主,而单纯的氮营养诊断只能判断水稻的生长状况,需要进一步获取水稻氮亏缺量数据才能以此对精准施 肥做出定量指导。
因此,本文拟以水稻无人机高光谱数据与氮亏缺量为研究对象,以水稻各个时期氮亏缺量约等于0的冠层光谱为标准,对水稻高光谱数据进行比值、差值与归一化差值变换,然后利用竞争性自适应重加权采样法处理原始光谱与变换光谱,筛选出效果最佳的光谱特征波段,并建立基于多元线性回归、极限学习机与蝙蝠算法优化极限学习机的水稻氮亏缺量反演模型,最后比较模型反演效果,确定基于高光谱数据的水稻氮亏缺量最佳反演方法,以期为快速获取水稻氮亏缺量提供研究方向,也为基于田间水稻氮营养状况的精准施肥提供定量指导。
数据获取与反演模型建立
2.1 实验设计
实验于2021年6—9月在辽宁省鞍山市海城市耿庄镇沈阳农业大学精准农业航空科研基地(北纬 40°58′45. 39″,东经 122°43′47. 01″)进行,为避免阴雨多云天气对遥感数据采集造成误差,数据采集过程选择天气晴好的日期,如遇云量超过20%或不利于遥感数据采集天气则顺延采集。水稻品种为北粳1705。
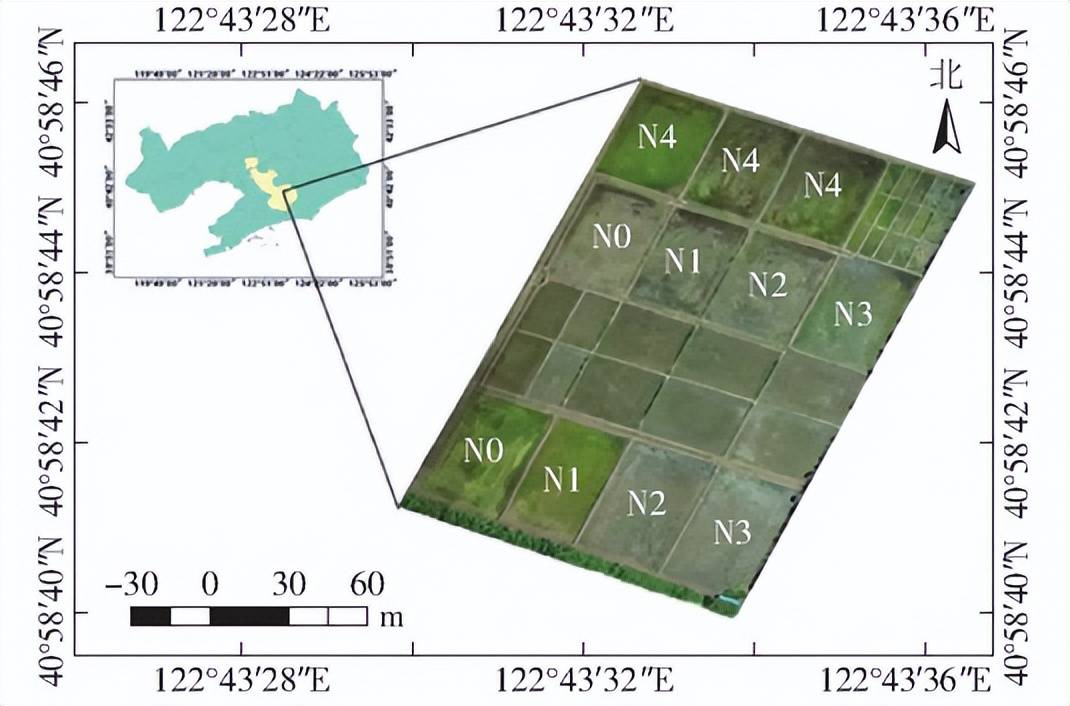
图1实验小区分布图
实验区域如图 1 所示,实验田分为2个大区, 其中实验区 1 设立5个氮肥梯度,施氮量分别为 N0(0kg/hm 2)、N1(75kg/hm2)、N2(150kg/hm2)、N3(225kg/hm2)、N4(300kg/hm2),实验区2也设计5个氮肥梯度, 施 氮 量 分 别 为:N0( 0kg/hm2)、 N1(50kg/hm2)、N2(100kg/hm2)、N3(150kg/hm2 )、 N4(200kg/hm2),氮肥基追比为 5∶ 3∶ 2。实验区 1 对每个梯度设立 3 个重复小区,共设立 3 × 5 = 15 个 小区。每个小区面积为 5m × 8m=40m2 ,实验区2每个小区面积为660m2,除氮肥梯度外两组实验区田间管理一致,磷钾肥施用量采用当地标准施用量进行,其中磷肥标准施用量为144 kg/hm2,钾肥标准施用量为192 kg/hm 2,基追比为 1∶ 1,其余田间管理同常规高产管理。田间采样由分蘖期至抽穗期,采样间隔9d,每次采样在各实验小区选取具有代表性的3穴水稻进行冠层光谱、水稻氮浓度与地上干物质量的获取,最后结果取平均值作为该小区水稻氮浓度与地上干物质量。实验区1共采集小区数据120组,实验区2共采集小区数据88组,共计208 组 样本。
2.2 数据获取
2.2.1 水稻光谱参量获取
采用无人机高光谱成像系统,高光谱波段范围为400 ~ 1 000nm, 分辨率为3nm,有效波段数为 253 个。
2.2.2 水稻农学参量获取
测定样本氮浓度与地上干物质量时,首先对每个小区的水稻进行破坏性采样,将样本带至实验室,然后将样本放入干燥箱中105℃ 杀青30min后, 80℃干燥至恒质量;之后测量干燥后样本的干物质量,并根据种植密度换算成地上部干物质量;最后将干燥后的样本磨碎,对研磨后的样本通过凯氏定氮法测量植株氮浓度。
2.3 基于临界氮浓度曲线的氮亏缺量计算方法
临界氮浓度是作物达到最大生物量所需的最小氮浓度,因此以临界氮浓度为基准可以推导出临界氮积累量方程,进而建立氮亏缺量方程,并确定水稻氮亏缺量。根据临界氮浓度曲线构建方法,以所测水稻氮浓度与地上干物质量为基础构建东北水稻的临界氮浓度曲线,具体方法如下:对比不同氮肥梯度下测定的氮浓度与干物质量,通过方差分析将样本分为受氮营养限制组与不受氮营养限制组;对受氮营养限制组的数据,将地上干物质量与氮浓度进行线性拟合;对不受氮营养限制组,对同一时期样本地上干物质量取平均值代表该时期最大地上干物质量;取各时期拟合曲线于最大地上干物质中位置的截点为该时期的理论临界氮浓度点;将各时期临界氮浓度点进行幂函数拟合,构建作物临界氮浓度曲线
Nc= aM-b(1)
式中 Nc———水稻临界氮质量比,g / g
M———地上干物质量,t/hm2
a、b———曲线参数
根据临界氮浓度曲线推导出临界氮积累量方程 与氮亏缺量方程,推导过程为
Ncna= 10aM1 - b(2)
Nand= Ncna- Nna(3)
式中 Ncna———临界氮浓度条件下植株氮积累量,kg/hm2。
Nand———氮亏缺量,kg/hm2
Nna———不同施氮量下植株实际氮积累量, kg / hm2。
2.4 光谱数据处理
2.4.1 高光谱数据转换
由于临界氮浓度状态下作物地上部氮营养状况与冠层叶片结构达到最佳状态,而这些都是影响水稻冠层光谱反射率的直接因素,因此,相比非临界氮浓度状态下的作物,临界氮浓度下水稻同其余水稻无论在光谱层面还是氮营养状况层面都存在一定的差异。为了在光谱层面突出临界氮浓度下水稻与其余水稻的差距,本研究选取各个时期Nand≈ 0 kg/hm2样本对应的光谱反射率,将其与同时期其余样本光谱反射率分别做比值、差值和归一化差值变换,计算方法为
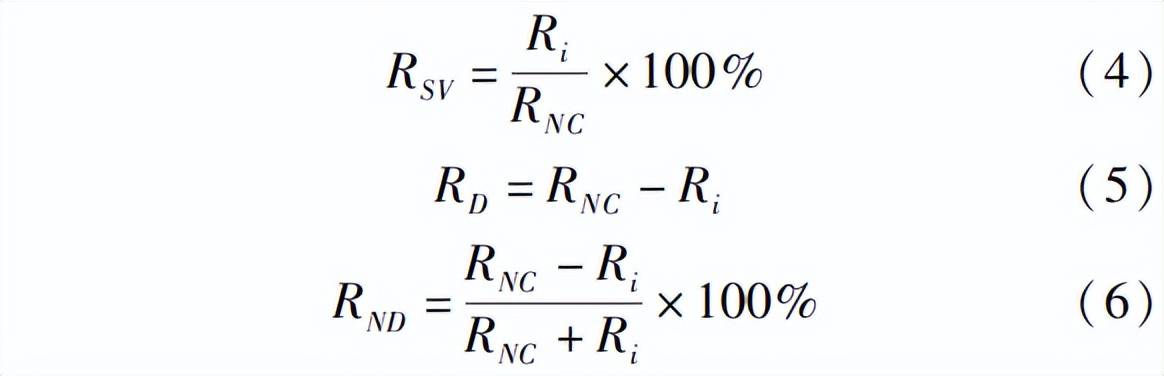
式中 RSV———比值光谱反射率,%
RD———差值光谱反射率,%
RND———归一化差值光谱反射率,%
RNC———临界氮浓度状态下样本光谱反射 率,Ri———同时期其余光谱反射率,%
2.4.2 高光谱特征波长提取
由于全波段光谱相邻波段数据相似度较高,且光在大量与所求变量无关的冗余信息,基于全波段谱的建模往往存在运行速度较慢,模型误差较高,反演精度较低等缺点。为了减少输入变量个数,降低数据冗余性,提高建模速度与精度,本文采用竞争性自适应重加权采样法对光谱反射率数据进行特征提取。CARS算法基于达尔文进化论简单有效的生存原则“适者生存”,对不适应的波长变量进行逐步淘汰。首先,利用蒙特卡罗采样法采样N次,再以偏最小二乘回归系数绝对值作为衡量标准,保留回归系数绝对值大的波长变量,去除回归系数绝对值小的波长变量,从而获得一系列的波长变量子集;然后对比每次产生的PLSR模型的交互验证均方差值(RMSECV),RMSEVC最小的那个模型所对应的变量子集被选为最优变量子集。
2.5 反演建模方法
选用多元线性回归(MLR)、 极 限 学 习 机 (ELM)2 种算法进行建模,并通过 2 种模型对训练集与测试集预测结果的决定系数R2与均方根误差 (RMSE)来判断模型的反演精度与鲁棒性。多元线性回归是一种解释单因变量与多自变量间线性关系的传统回归建模方法,模型结果唯一,并能够更好地体现各个自变量与因变量间的相关程度。极限学习机是一种基于单层前馈神经网络理论的改进算法,具有学习速率快、泛化能力强、训练精度较高等优点。但由于极限学习机每 次运行中输入层与隐含层之间的连接权值和隐含层神经元的阈值都是随机生成的,其在训练稳定性上存在不足,且容易陷入局部最优解。因此,本研究采用蝙蝠算法对极限学习机隐含层初始权重进行优化。蝙蝠算法是一种新的元启发式优化算法。该算 法模拟自然界中蝙蝠利用回声定位来探测猎物和规 避障碍物的原理,控制蝙蝠发出不同频率的搜索脉冲来寻找最优解。相较于经典的粒子群算法,蝙蝠算法引入了局部搜索机制,在每轮迭代中最优蝙蝠个体会采用随机搜索的方式进行局部寻优,有助于算法跳出局部最优 解,增强算法的全局搜索性。
结果与讨论
3.1 植株氮亏缺量确定
3.1.1植株氮浓度与地上部干物质量统计分析
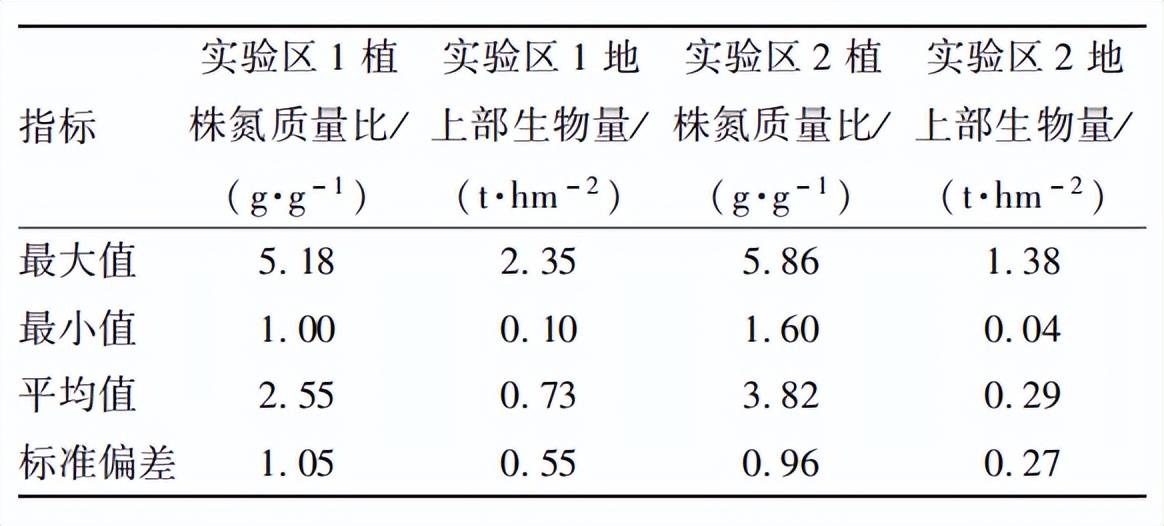
东北水稻全生育期植株氮浓度与地上部干物质量的基本信息如表 1 所示,由于实验包含全生育期采样数据,实验区 1 与实验区 2 中的植株氮浓度与 地上部干物质量离散程度较高,最大值与最小值差 别较大。其中实验区 1 由于施氮梯度较高,其整体 氮浓度与地上部干物质量高于实验区 2。实验区 2 由于在分蘖期与拔节期采样密度较高,其平均氮浓度较高,平均地上部干物质量较低。
表1植株氮浓度与地上部生物量统计
3.1.2临界氮浓度曲线与氮亏缺量计算
根据 1.3 节提出的临界氮浓度曲线的构建方法,本文将每个采样日获得的氮浓度与干物质量进行回归拟合.计算出每个采样日的东北水稻临界氮浓度,之后根据各个临界氮浓度与对应的干物质量构建东北水稻临界氮浓度曲线(图 2)。曲线方程为

决定系数 R2为 0. 874 7,RMSE 为 0. 382 5 g/g。
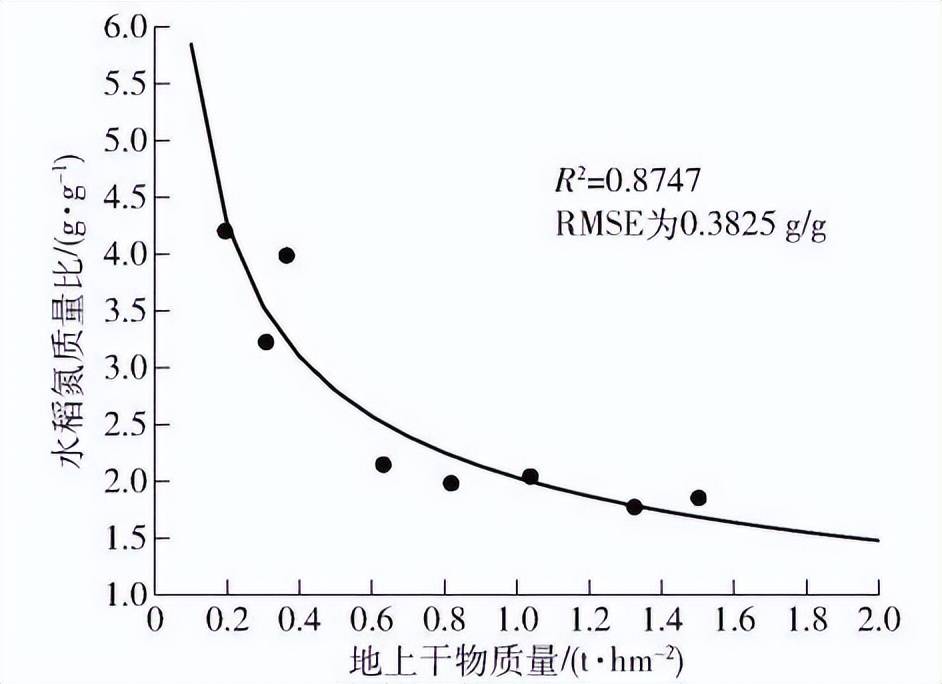
图2 临界氮质量比拟合曲线
曲线参数 a、 b 分别为2. 026、 - 0. 460 3,与 SONG等计算出的东北水稻临界氮浓度曲线参数 a=1. 99、b =-0. 44 非常接近,可进一步用于东北水稻的氮亏缺量计算。根据 1. 3 节中的计算方法,本文结合样本数据 与临界氮浓度曲线,计算各样本的氮亏缺量。各个氮肥梯度的平均氮亏缺量如图 3 所示,随着氮肥梯度的增高,氮亏缺量整体呈下降趋势,综合实验区 1 与实验区 2 氮亏缺量的下降趋势可知,水稻最佳施 肥量在 150 ~ 200 kg / hm2之间。
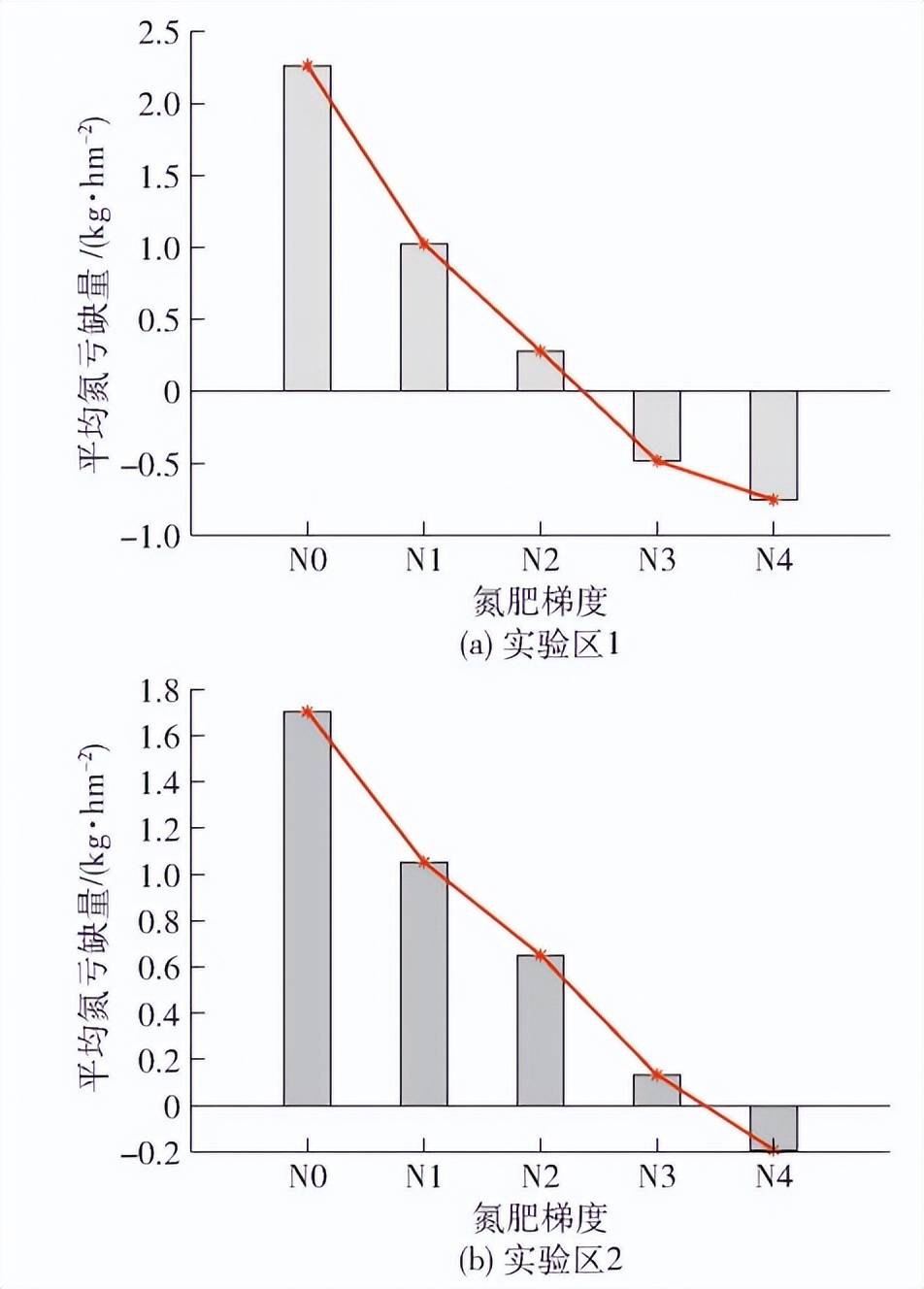
图3 各氮肥梯度平均氮亏缺量
3.2 光谱数据处理
3.2.1光谱数据变换结果
根据 1. 4. 1 节提出的方法,本研究选取各个时 期Nand≈0kg/hm2的样本对应光谱反射率,将其与其余样本光谱反射率分别作比值、差值、归一化差值变换,变换结果与相关性分析结果如图 4、5 所示,
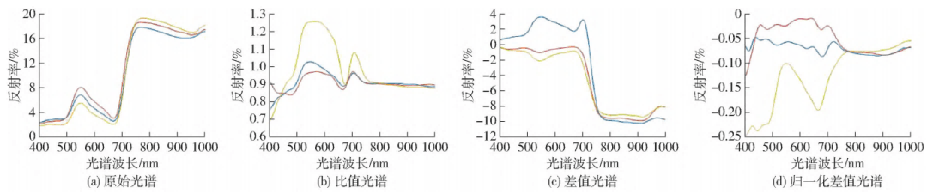
图4 原始与变换光谱反射率

图 5 原始与变换光谱相关性
对比可得,不同施氮水平下原始光谱全波段反射率变换趋势基本一致,在可见光波段(波长400 ~ 700nm)光谱反射率均呈“先升后降” 的变化规律。同时,在绿波段(波长550nm 附近) 出现明显的反射峰,在红波段(波长680nm 附近) 出现明显的吸 收谷。在波长680 ~ 770nm内不同施氮水平的光谱 反射率曲线变化基本一致,反射率急剧升高,在近红 外波段(770 ~ 1 000nm)形成较高的反射平台;不同施氮水平下比值、差值与归一化差值光谱反射率有一定差别,但在绿波段与红波段差别较为明显;在与氮亏缺量的相关性方面,4种光谱反射率与氮亏缺量的相关性图像趋势基本一致,在红波段与绿波段形成 2个波峰,其中归一化差值光谱在2个波峰处相关性最佳,其次分别是比值光谱、差值光谱与原始光谱。
3.2.2 特征波长选择
利用CARS算法对水稻原始光谱与归一化差值光谱反射率进行特征波长的筛选,根据交叉验证集RMSECV确定光谱特征波长后,删去相邻的特征波长,并通过相关性分析选取与 Nand相关性最好的波长作为最佳特征波长。
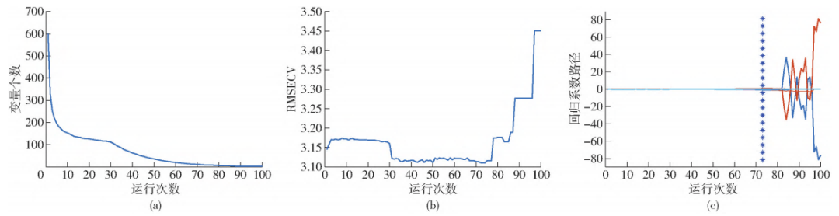
图6 原始光谱CARS降维结果
以原始光谱选择过程为例:由图6a可以看出,随着运行次数的增加,原始光谱被选出的波段数逐渐减少,图6b中RMSECV整体呈下降趋势,说明筛选过程中剔除的变量与SOM去除量无关,而72次迭代以后,RMSECV呈回升趋势,表明反射率光谱中与SOM无关的大量信息或噪声被 添加,从而导致RMSECV上升。图6c为所有变量在每次采样过程中的回归系数路径图,表示随着运行次数的增加各波段变量回归系数的变化趋势。结合图6b分析发现 当运行次数为第72次时,RMSECV最小即所选择的光谱变量子集最优。原始光谱与3种变换光谱的特征选择结果如表 2 所示。
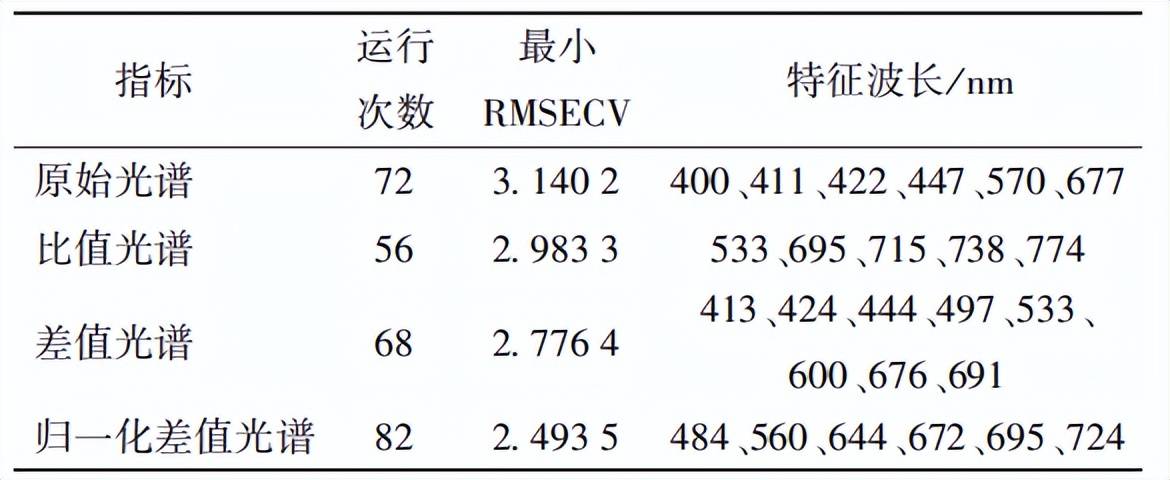
表2 CARS提取后原始光谱与变换后光谱特征波长与运行结果
3.3 氮亏缺量反演模型构建
为比较不同光谱变换方法与反演建模方法的性能,分别以经CARS算法筛选出的原始光谱、比值光谱、差值光谱、归一化差值光谱特征波长为输入变 量,水稻氮亏缺量为输出变量,分别构建基于MLR、ELM 的水稻氮亏缺量反演模型。
3.3.1 基于MLR的氮亏量反演
将 4 种光谱特征波长作为输入变量,分别构建 基于MLR的反演模型,反演结果如图 7 所示:
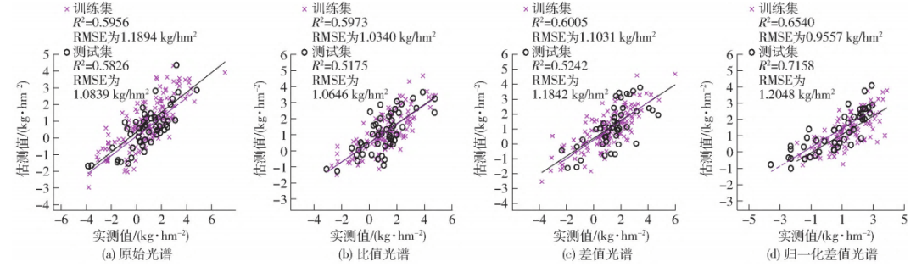
图7 基于MLR的不同反演模型结果
其中 基于归一化差值光谱的模型精度最高,训练集与测试集的 R2分别为 0. 654 0、0. 715 8,RMSE分别为 0. 955 7、1. 204 8 kg/hm2;其次是基于差值光谱反演 模型,其 R2分别为 0. 600 5、0. 524 2,RMSE分别为 1. 103 1、1. 184 2 kg / hm2;然后是基于原始光谱的反演模型,R2分别为 0. 595 6、0. 582 6,RMSE分别为 1. 189 4、1. 083 9 kg/hm2。基于比值光谱的模型精度精度R2分别为0. 597 3、0. 517 5,RMSE分别为 1. 034 0、1. 0646kg/hm2;基于归一化差值光谱的反演模型反演效果最好。
3.3.2 基于ELM的氮亏量反演
将 4 种光谱特征波长作为输入变量,分别构建基于 ELM 的反演模型,映射函数为Sigmoid,隐含层个数分别为13、14、12、13,训练结果如图 8 所示。
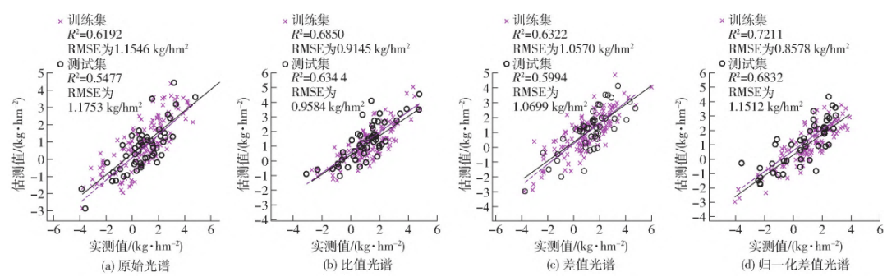
图8 基于ELM的反演模型结果
其中基于归一化差值光谱的模型精度最高,训练集 与测试集的 R2分别为 0. 721 1、0. 683 2,RMSE分别为 0. 857 8、1. 151 2 kg/hm2;其次是基于比值光谱的反演模型,R2分别为 0. 685 0、0. 634 4,RMSE分别为0. 914 5、0. 958 4 kg/hm2;然后是基于差值光谱反演 模型,其 R2分别为 0. 632 2、0599 4,RMSE分别为 1. 057 0、1. 069 9 kg/hm2;最后是原始光谱的模型精度最低,R2分别为 0. 619 2、0. 547 7,RMSE分别为 1. 154 6、1. 175 3 kg/hm2。基于归一化差值光谱的反演模型R2与 RMSE均优于其余模型。
3.4 针对不同施肥量的模型预测能力
在实验区 1 与实验区 2 中,以反演效果最优模 型的氮亏缺量估测值与对应梯度的氮亏缺量实测值 对比,结果如图9所示:
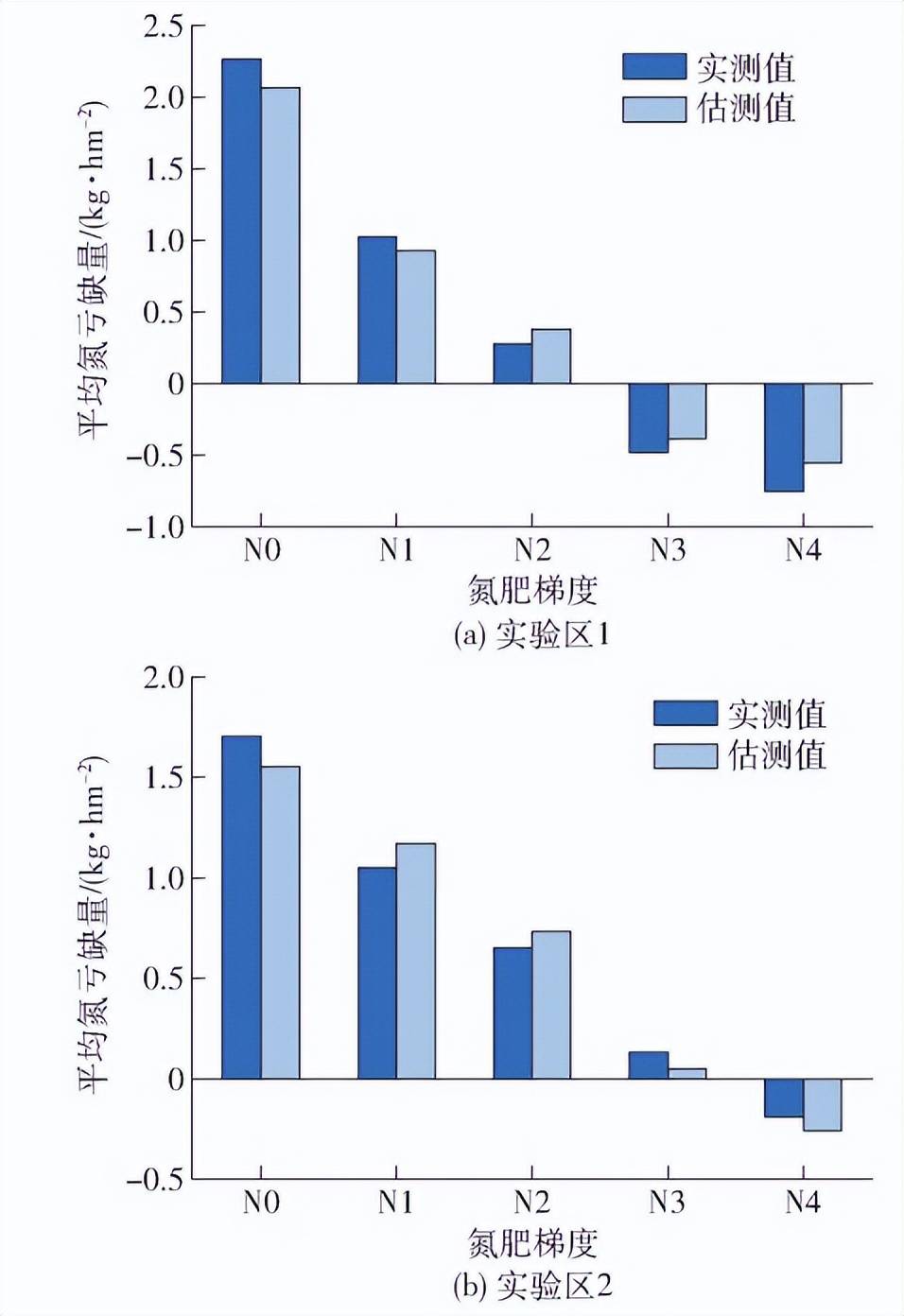
图9 不同梯度氮亏缺量估测效果
实验区 1 与实验区 2 中,整 体上估测值与实测值较为相近,对水稻氮亏缺量的估测能力较强;随着施氮量梯度的提升,对氮亏缺量的估测精度呈下降趋势,在临界氮浓度状态附近估测能力较差,这可能是因为临界氮浓度状态下与非临界氮浓度状态下水稻光谱变化规律不一致,模型同时估测 2 种状态的水稻光谱预测难度较高所致。
讨论
以往学者研究焦点往往集中在如何提高获取水稻田间氮浓度或氮营养指数信息的准确性,然而这些信息只能描述水稻的氮营养状况,难以对水稻氮亏缺状况进行精确的定量描述,进而指导精准施肥。本文首先通过田间采样获取水稻氮浓度、地上生物量与冠层光谱数据,根据前人提出的方法构建东北水稻临界氮浓度曲线,并基于临界氮浓度曲线计算水稻氮亏缺量。
由于临界氮浓度表示作物达到最大干物质量所需的最小氮浓度,以临界氮浓度作为判断水稻氮亏缺量的标准更能反映田间水稻的氮营养状况与实际氮需求情况。同时本研究还采用了无人机高光谱遥感技术与数据驱动的反演建模方法,通过水稻冠层光谱数据对氮亏缺量进行反演。无人机高光谱遥感技术能够快速、大面积获取水稻冠层光谱信息,进而对田间水稻氮营养状况进行快速诊断,数据驱动的反演建模方法虽然可解释性与泛化能力较差,但其能够对光谱与氮亏缺量之间的复杂非线性关系进行准确描述,将二者结合能够同时满足追肥决策所需的精确性与时效性,为定量追肥决策的实现提供了解决思路。由于临界氮浓度状态下作物地上部氮营养状况与冠层叶片结构达到最佳状态,而这些都是影响水稻冠层光谱反射率的直接因素,因此,相比非临界氮浓度状态下的作物,临界氮浓度下作物无论在光谱层面还是氮营养状况层面都存在一定差异。为了在光谱层面上放大临界氮浓度下水稻与其余水稻的差距,去除与氮亏缺量无关的冗余信息,本研究以 各时期接近临界氮浓度状态下光谱为标准光谱,分 别对原始光谱进行比值、差值、归一化差值变换,之 后运用 CARS 算法提取变换光谱的特征波长。
由结果可知 2 种光谱变换均提升了其与氮亏缺量之间的相关性,其中归一化差值变换相关性与反演精度最高,这可能是由于归一化差值计算既通过差值计算 放大了临界氮浓度光谱与其余冠层光谱的差异,又 统一了差值光谱数据的量纲,还对光谱数据的统计 分布性进行了归纳。在建模过程中,本文选择蝙蝠算法优化ELM 算 法的初始权重,并将其与原始 ELM 进行对比建模。
虽然本研究利用无人机高光谱数据对水稻氮亏缺量反演取得了较好的效果,但对于实现基于无人机高光谱遥感的水稻精准追肥仍存在以下几点问题:①本文采用的归一化差值处理方法是基于各个采样期临界氮浓度状态的水稻光谱计算的,而这些光谱如果用于其他水稻光谱的计算时,可能会因为采样时间、水稻品种与发育状况等因素造成误差,进而影响氮亏缺量反演效果。②蝙蝠算法优化后的ELM 算法也存在收敛精度不高,容易陷入局部最小值等问题。后续的研究重点应集中在如何在无人机高光 谱数据中实时提取临界氮浓度状态下的水稻光谱与对反演算法的精度与鲁棒性进行优化这两方面上。
结论
(1)构建了东北水稻临界氮浓度曲线,可表示 为 Nc = 2. 026M - 0. 460 3。
(2)通过 CARS 算法提取的原始光谱、比值光 谱、差值光谱与归一化差值光谱特征波长分别为 400、411、422、447、570、677 nm,533、695、715、738、 774 nm,413、424、444、497、533、600、676、691 nm, 484、560、644、672、695、724 nm。
将马铃薯5个生育期的冠层原始光谱和一阶微分光谱分别与对应的PNC进行相关性分析,结果如图2所示。其中,自由度为48时,0.01相关水平阈值是0.36,黑色和红色纵向虚线分别表示冠层原始光谱和一阶微分光谱特征波长。
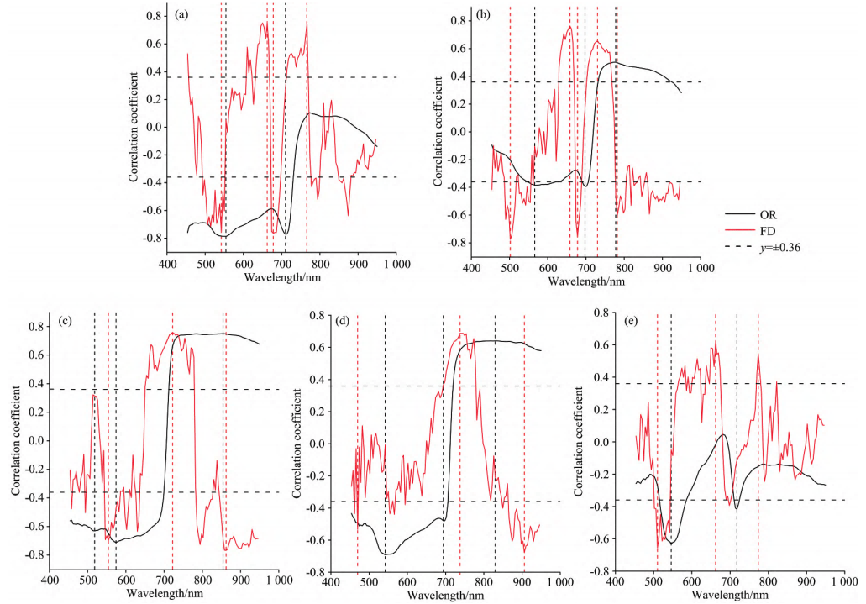
图2冠层光谱与PNC相关性OR表示冠层原始光谱与PNC相关性曲线,FD表示一阶微分光谱与PNC相关性曲线
由图2可知,现蕾期,冠层原始光谱在波段454~730nm 范围内与PNC呈0.01相 关 水 平,一阶微分光谱主要在波段492~550、630~666、674~694和710~766nm范围内与PNC呈0.01相关水平,因此,选取相关性较高的波长554和710nm 为冠层原始光谱特征波长,波长542、662、 678和766nm为一阶微分光谱特征波长;块茎形成期,冠层原始光谱主要在波段550~618、694~706和734~922nm范围内与PNC呈0.01相关水平,一阶微分光谱主要在波段 486~550、626~662、670~682、698~762和774~798nm范围内与PNC呈0.01相关水平,因此选取相关性较高的波长566、698和778nm为冠层原始光谱特征波长,波长502、 658、678、730和782nm为一阶微分光谱特征波长;块茎增 长期,冠层原始光谱主要在波段454~698和714~950nm 范围内与PNC呈0.01相关水平,一阶微分光谱主要在波段546~582、650~778和846~946nm范围内与PNC呈0.01 相关水平,因此,选取相关性较高的波长518、574和854nm为冠层原始光谱的特征波长,波长554、722和862nm 为一 阶微分光谱的特征波长;淀粉积累期,冠层原始光谱主要在波段454~706和722~950nm范围内与PNC呈0.01水平 相关,一阶微分光谱主要在波长470nm、波 段694~778和866~946nm范围内与PNC呈0.01相关水 平,因此,选取相关性较高的波长542、694和830nm为冠层原始光谱的特征波长,波长470、738和906nm为一阶微分光谱的特征波长;成熟期,冠层原始光谱主要在波段 518~582和 714~ 722nm范围内与PNC呈0.01相关水平,一阶微分光谱主要在波段502~542、650~674和770~778nm范围内与PNC呈0.01相关水平,因此,选取相关性较高的波长546和718 nm为冠层原始光谱的特征波长,波长510、662和774nm为一阶微分光谱的特征波长。
3.2 图像特征与PNC相关性分析
为探究高光谱图像特征对估算马铃薯PNC的影响,利用GLCM和颜色矩分别提取了冠层原始光谱特征波长对应的图像的纹理和颜色特征,并分析与PNC的相关性,结果如图3所示。由图3可知,马铃薯现蕾期,与 PNC相关性较高的前5个图像特征分别是710Var(波长701nm 对应的 Var纹 理)、554Var、554Mea、710Cor和 554Ent,相关系数绝对值位于 0.78~0.86之间;块茎形成期,相关性较高的前5个图像特 征分别是698Hom 、698Sec、698Ent、698Cor和566Mea,相 关 系 数 绝对值位于0.79~0.85之间;块茎增长期,相关性较高的前 5个图像特征 分 别 是518Ske、518Var、854Ent、854Sec和574Con, 相关系数绝对值位于0.65~0.75之间;淀粉积累期,相关性 较高的前5个图像特征分别是542Mea、542Ske、542Ent、542Sec 和542Cor,相关系数绝 对 值 位 于 0.60~0.69之 间;成 熟 期, 相关性较高的前5个图像特征分别是546Mea、546Ent、546Sec、 546Cor和546Con,相关系数绝对值位于0.53~0.63之间。5个生育期筛选的相关性较高的前5个图像特征均与 PNC 达 到 0.01相关水平,且都含有纹理和颜色2种特征,这说明纹理和颜色特征与马铃薯PNC的联系较为密切。
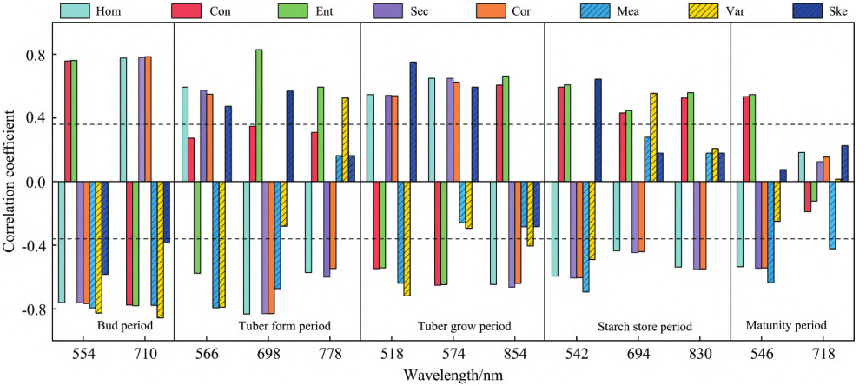
图3图像特征与PNC相关性
3.3 马铃薯PNC估算
3.3.1 单一模型变量估算马铃薯 PNC
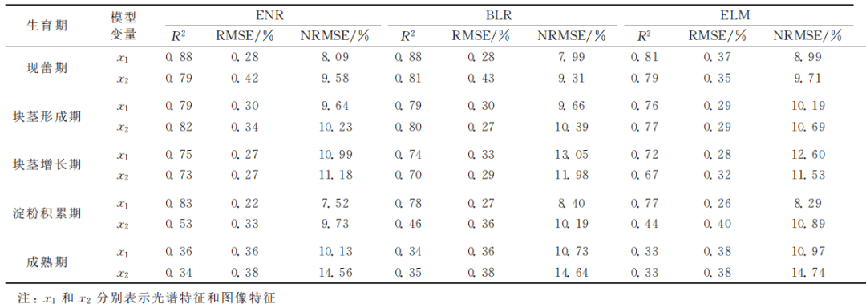
分别基于马铃薯5个生育期冠层光谱特征波长和相关性较高的前5个图像特征,利用ENR、BLR 和 ELM3种方法构建PNC估算模型并验证,建模和验证结果如表1和 表2 所示。由表1和 表 2可 知,基 于 光 谱 特 征 (x1)和 图 像 特 征 (x2)利用3种方法构建的马铃薯各生育期PNC估算模型均表现为现蕾期到淀粉积累期估算效果较好,成熟期估算效果较差。其中,现蕾期到块茎增长期,利用3种方法基于光谱特征构建的模型效果略优于图像特征,但相差不大;淀 粉积累期,基于图像特征的估算效果开始变差,这一时期,光 谱特征构建的模型效果明显优于图像特征;成熟期,基于2种 模型变量的估算效果均明显变差,基于光谱特征的建模效果优于图像特征,验证效果二者相差不大。综合5个生育期的建模和验证结果可知,基于同种模型变量,利用ENR构建的PNC估算模型效果较优,BLR方法次之,ELM方法较差。
表1 各生育期基于单一模型变量估算马铃薯PNC的建模结果
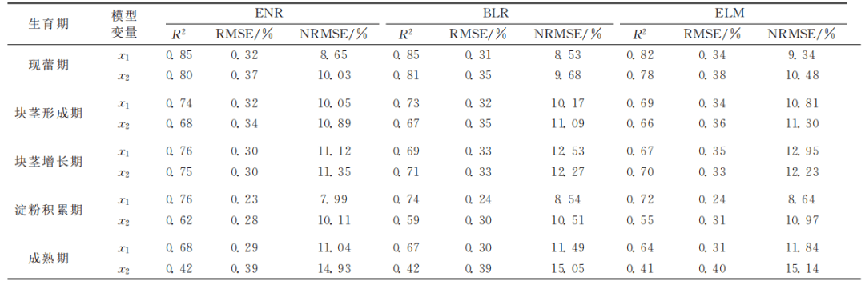
表2 各生育期基于单一模型变量估算马铃薯PNC的验证结果
3.3.2 结合光谱和图像特征估算马铃薯
PNC为探究结合高光谱图像和光谱特征估算马铃薯PNC的效果,基于冠层光谱特征波长及筛选的与PNC相关性较高的纹理和颜色特征,分别利用3种方法构建马铃薯5个生育期的PNC估算模型并验证,结果如表3和图4所示。由表3和图4可知,与单一模型变量相似,基于图谱融合特征(x3) 构建的马铃薯PNC估算模型在现蕾期到淀粉积累期效果较好,成熟期效果较差。综合表1、表2、表3和图4的结果可 知,现蕾期到淀粉积累期,以图谱融合特征为模型变量的PNC估算模型的精度和稳定性均明显高于单一光谱特征和图像特征,而成熟期,图谱融合特征的估算效果与单一光谱特征相差不大。基于图谱融合特征利用3种方法估算马铃薯PNC的效果为ENR较优,BLR次之,ELM 较差。
表3各生育期基于融合特征估算马铃薯PNC的建模结果
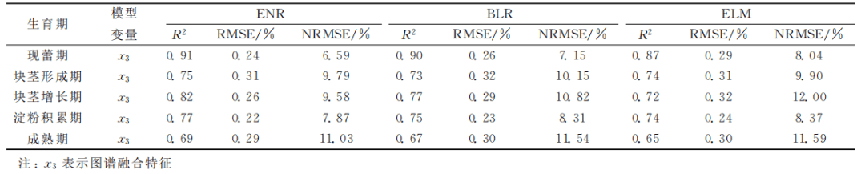
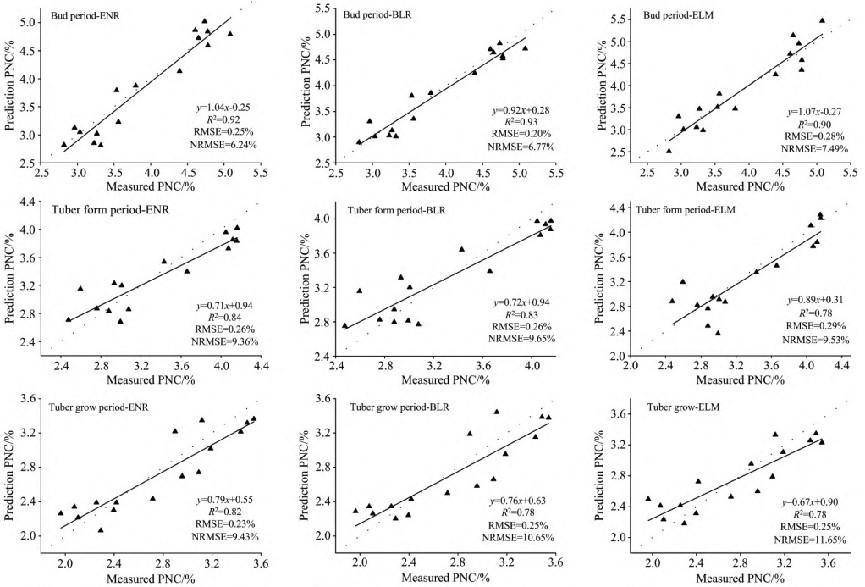
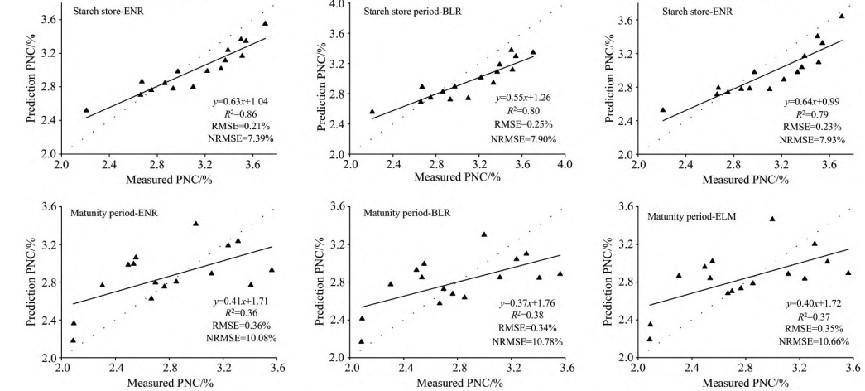
图4 各生育期基于融合特征估算马铃薯PNC的验证效果
为探究高光谱图像特征估算马铃薯PNC的效果,分别基于光谱特征和图像特征利用3种方法构建马铃薯5个生育期的PNC估算模型。由结果可知,现蕾期到块茎增长期,以图像特征为模型变量构建的PNC估算模型的估算效果与光谱特征相差不大,这表明图像特征能较好地反映马铃薯的PNC状况,其原因是,作物植株氮含量的变化不仅会引起冠层光谱特性发生改变,也会导致冠层凸凹部分的灰度值及亮度值出现差异,即图像的纹理和颜色差异,因此,图像特征也能较好地估算PNC;淀粉积累期,光谱特征估算PNC的效果明显优于图像特征,其原因是,淀粉积累期,部分马铃薯植株开始衰老,叶片逐渐枯黄,纹理减少,颜色特征减弱,导致图像特征与PNC的相关性降低。成熟期,2种模型变量构建的PNC估算模型均未取得较好的效果,其原因是,马铃薯生长后期,受降雨较 多影响,部分马铃薯植株枯死凋零, 叶片迅速脱落,这一时期提取的光谱和图像特征均不能反映马铃薯真实的生长状态,故模型估算效果较差。
为探究图谱融合特征估算马铃薯PNC的效果,以光谱特征结合图像特征为模型变量,利用3种方法构建马铃薯5个生育期的PNC估算模型。由结果可知,现蕾期到淀粉积累 期,相较于单一光谱特征和图像特征,图谱融合特征构建的模型R2均有所提高,RMSE和NRMSE均有所下降,其原因是,图谱融合特征包含不同氮营养状况的作物冠层光谱和图像两方面的信息,为估算PNC提供了更多的有效信息,能更准确地反映PNC的变化情况。
成熟期,图谱融合特征估算PNC的效果明显变差,其原因是,受降雨等因素的影响,这一时期提取的光谱和图像特征不能反映马铃薯真实的生长状态,二者结合也未能提高模型的精度。利用ENR、BLR和 ELM3种方法构建马铃薯PNC估 算模型,综合各生育期的建模和验证结果可知,基于同种模型变量,利用ENR方法估算马铃薯PNC效果最优,BLR 次 之,ELM最差。其原因是,ENR在损失函数中同时引入L1和L2惩罚项,提高了对自变量的筛选和缩减能力,能更有效地利用多个光谱和图像特征对PNC进行估算;BLR虽能充分利用样本数据,但效果不如 ENR,可 能 原 因 是 BLR过于依赖先验信息,导致模型的精度有所降低;ELM虽具有良好的泛化性能,但对较小的数据集优势不明显,导致模型精度不高。此外,本研究仅采用 了1年的马铃薯数据,后续将采用不同地点及年限的马铃薯数据验证所得结论,以期得到普适的马铃薯PNC估算模型。
研究方法
(1)利用相关系数法筛选的马铃薯5个生育期的冠层光谱特征波长存在差异,但多数集中于可见光区域。
(2)基于冠层原始光谱特征波长图像筛选的5个图像特征与马铃薯PNC均达到0.01相关水平,且都包含纹理和颜色2种特征。
(3)基于光谱特征、图像特征和图谱融合特征构建的马铃薯 PNC估算模型均表现为现蕾期到淀粉积累期估算效果较好,成熟期效果较差,且现蕾期到淀粉积累期图谱融合特征的估算效果明显优于单一光谱特征和单一图像特征。
(4)马铃薯各生育期基于同种模型变量利用ENR方法构建的PNC估算模型效果较优,BLR方法次之,ELM方法较差。其中,以图谱融合特征为模型变量,利用ENR构建的PNC估算模型效 果最好。该研究可为马铃薯氮肥的精准管理提供一种新的技术参考。
推荐:
便携式地物光谱仪iSpecField-NIR/WNIR
专门用于野外遥感测量、土壤环境、矿物地质勘探等领域的最新明星产品,由于其操作灵活、便携方便、光谱测试速度快、光谱数据准确是一款真正意义上便携式地物光谱仪。

无人机机载高光谱成像系统iSpecHyper-VM100
一款基于小型多旋翼无人机机载高光谱成像系统,该系统由高光谱成像相机、稳定云台、机载控制与数据采集模块、机载供电模块等部分组成。无人机机载高光谱成像系统通过独特的内置式或外部扫描和稳定控制,有效地解决了在微型无人机搭载推扫式高光谱照相机时,由于振动引起的图像质量较差的问题,并具备较高的光谱分辨率和良好的成像性能。

便携式高光谱成像系统iSpecHyper-VS1000
专门用于公安刑侦、物证鉴定、医学医疗、精准农业、矿物地质勘探等领域的最新产品,主要优势具有体积小、帧率高、高光谱分辨率高、高像质等性价比特点采用了透射光栅内推扫原理高光谱成像,系统集成高性能数据采集与分析处理系统,高速USB3.0接口传输,全靶面高成像质量光学设计,物镜接口为标准C-Mount,可根据用户需求更换物镜。

审核编辑黄宇
-
光谱
+关注
关注
4文章
1058浏览量
37414 -
成像系统
+关注
关注
2文章
217浏览量
14601 -
无人机
+关注
关注
237文章
11385浏览量
196712
发布评论请先 登录
昆明理工学术新突破,莱森光学设备慧眼识锂矿

无人机高光谱成像系统关键性能指标解析与优化策略
无人机多光谱在高山松地上生物量估测的研究应用进展
无人机多光谱遥感在水生植被精细分类中的应用
无人机高光谱成像仪在矿产勘探领域的创新应用与技术突破
如何高效部署无人机高光谱成像系统实现精准数据采集
太阳光模拟器 | 在无人机老化测试中的应用

光伏无人机巡检诊断系统的作用
不开矿也能看成分?高光谱成像相机让找矿更简单-莱森光学
科普|无人机反制枪介绍

高光谱相机如何通过无人机实现地表精准遥感?

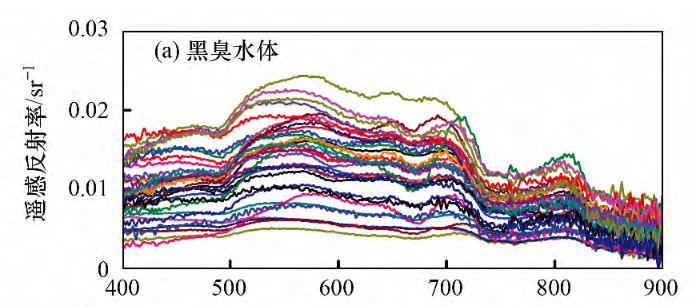
无人机多光谱遥感技术在城市黑臭水体监测中的应用 ——高效识别与动态管控的新方案
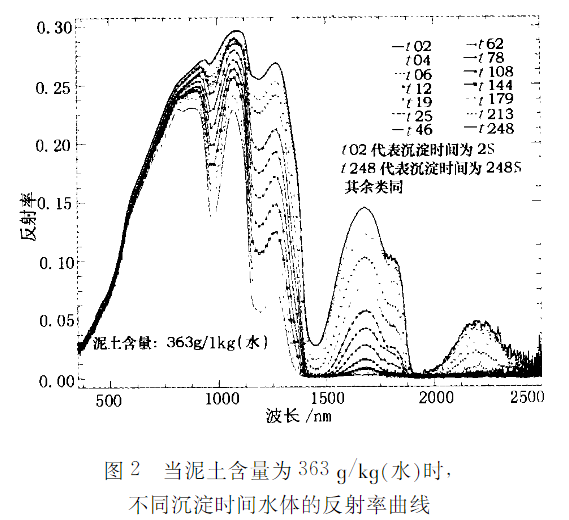
高光谱低空遥感技术在水环境监测中的应用—从泥沙量化到污染动态追踪
普源示波器用FFT功能快速诊断无人机电机驱动故障
地物光谱仪在作物营养监测中的应用




评论