 如何取消激光雷达接收器的环境光
如何取消激光雷达接收器的环境光

飞行时间(ToF)激光雷达面临的一个更困难的挑战是接收信号链所需的高灵敏度。通常,准直(平行光线)激光脉冲被发送到一个点。准直激光源的优点是它限制了发散造成的光损失,并使光斑尺寸在距离内保持恒定。然而,一旦光线照射到物体上,这种光就会向多个方向反弹——这称为散射。反射回光源的光量与 1/R 成正比2,也称为平方反比定律。在短距离内,检测物体并不困难。然而,为了检测>100米处的物体,需要高增益来检测由于平方反比定律损失而导致的少量反射光。在接收器中使用高增益的后果之一是环境光对信号链的影响。太阳是波长范围很广的光源。激光雷达系统通常选择900 nm和1550 nm的波长,因为这些光谱中来自太阳的光自然为零。不幸的是,为了探测远处的物体,我们在接收器中获得了显着的收益,即使光谱中有这些自然零点,太阳的环境光也会使接收器饱和。这有效地使系统失明并使其无用。本文将探讨如何减轻环境光对激光雷达接收器链的影响的解决方案。
基本
退后一步,激光用于发出狭窄的光脉冲;该激光脉冲击中目标,光线从物体反射。检测器用于测量该反射返回所需的时间。通过了解光速和激光脉冲的往返时间,可以计算出距离。通常,脉冲激光的振幅越高,返回信号就越大。对于远程激光雷达,激光功率的人眼安全限制了现代系统的范围。曲线下的面积决定了脉冲的能量,如图1所示。通过达到更高的峰值功率,必须减小该脉冲的宽度,以使曲线下的面积低于眼睛安全限值。因此,我们的目标是提供宽度相对较窄的高振幅激光脉冲。在当前的LIDAR系统中,脉冲宽度约为5 ns,并且正在向更短的脉冲宽度移动。激光雷达需要考虑的另一个方面是散射。通常,使用雪崩光电二极管(APD)检测器来提供光增益,以解决平方反比定律问题。APD有利于信号链,因为跨阻放大器(TIA)是信号链中噪声的限制因素。通过在检波器中施加增益,可以降低系统的输入参考噪声。请记住,APD存在局限性,增益过大会在击穿时产生较差的噪声性能。
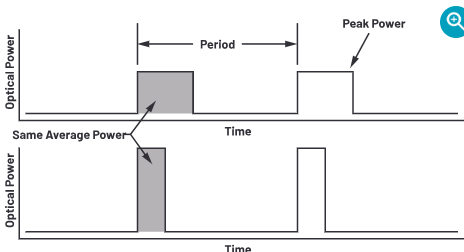
图1.不同激光输出的示例。
激光雷达挑战
与任何其他工程问题一样,需要权衡取舍。接收信号链需要具有足够高的带宽来检测~5 ns宽激光脉冲的边缘,并且检波器的电容需要很小,以不限制TIA带宽。较小的电容也有助于APD的散粒噪声,因为它们彼此成比例。对于实际应用,必须平衡灵敏度、带宽和功耗。在接收信号链中获得更高增益的另一个挑战是随之而来的大动态范围。现代APD的反向偏置接近300伏,以实现这些更大的增益。当高反射物体非常靠近探测器时,问题变得明显。这种大信号与APD相对较大的增益相结合,可能导致数百mA电流流过TIA。大多数通信TIA不能在这种事件中幸存下来,更不用说在下一个脉冲周期的合理时间内恢复了。幸运的是,激光雷达专用TIA具有内置箝位,可分流电流并在100 ns以下恢复。通过占空比和关闭未使用的通道来解决电源问题。考虑到这些,最后一个大问题是来自环境光的直流光电流,解决这个问题并非易事。
交流耦合与直流耦合输入
乍一看,一个简单的解决方案是将输入耦合到TIA以阻止直流电。不幸的是,这种方法有很多陷阱。饱和恢复时间将受到影响,使系统失明。如果来自近距离物体的大脉冲,交流电容器将被充电。TIA只能向交流电容注入少量电流,因为反馈电阻(大约为10 kΩ至100 kΩ)限制了电流。根据电容器的值,RC时间常数非常大,可能需要数百μs才能恢复。这是不可接受的,因为通常为2 m检测分配100 μs的时间,并且我们将错过来自更远物体的信号。交流耦合TIA的另一个缺陷是激光源的重复率。当您交流耦合输入脉冲时,脉冲将在交流电容上取平均值。探测器的信号是单极性的,会慢慢地为交流电容器充电。该电容器上会产生直流偏移。这系统地减小了TIA的线性范围,直流偏移将根据重复率和返回信号的幅度而变化。有关交流输入耦合TIA的更详细分析,请参阅“如何有效设计和优化LIDAR系统的TIA接口”一文。幸运的是,直流耦合输入避免了所有这些细微差别和次级效应,但代价是增加了复杂性。消除此电流的有效方法是集成闭环电路,将相反的电流注入TIA的输入。
直流取消电路
图2显示了如何实现模拟闭环以消除直流输入电流的框图。误差放大器的工作是查看TIA的输出,并向TIA的输入注入相反的电流。它比较并伺服输出以匹配 TIA 的基准电压源。最好使用TIA的基准电压源来推导误差放大器的基准电压源,原因有二:与输出的基准电压源匹配,并确保PSRR对于TIA来说是守恒的。为了节省功耗和成本,误差放大器的电路应使用带宽较低的放大器。建议对误差放大器的输入使用低通滤波器,因为您不希望快速脉冲耦合回输入。
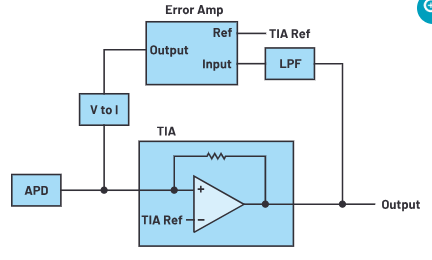
图2.直流取消框图。
图 3 示出了 LTC6560 的直流消除电路。当TIA没有输入电流时,LTC6560的输出标称值约为1 V DC。因此,需要从基准电压源分压一个电阻分压器来匹配该电压,将基准电压标称值1.5 V分压以匹配输出1 V。 R1和C1产生约10.6 kHz的低通;这有助于最大限度地降低误差放大器注入 LTC6560 的噪声量。该低通将是该环路的主极点,可以根据不同的带宽要求进行调整。一个简单的积分误差放大器电路用于将LTC6560的输出伺服至1 V;请记住,当LTC1上没有电流时,标称输出电压为6560 V。R2是一款20 kΩ电阻,是将LT6015的输出转换为电流的简单方案。该电阻器的值和运放的最大摆幅将根据 LT6015 的输出摆幅设定最大电流。由于LT6015不是轨到轨运放,因此最大直流抵消将限制为LT6015的最大摆幅与LTC6560的输入自偏置电压(标称值为1.5 V)之差。这大约是 3 V,将为我们提供 150 μA 的最大直流抵消电流。
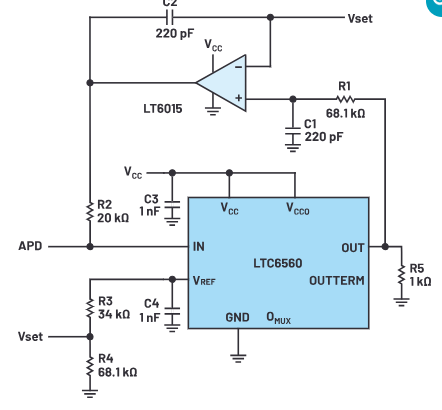
图3.用于 LTC6560 的直流消除电路。
图 4 和图 5 示出了 LTC6560 DC 消除电路的 LTspice 仿真。请注意,仿真中使用V2来设置积分误差放大器的基准电压源。这用于帮助电路仿真和建立确定性的起始电压。®
该 DC 消除电路也可与 LTC6561 配合使用。通过使用四个输出电阻器将电流注入每个通道,您可以节省三个LT6015,如图6所示。需要注意的一点是,我们现在正在创建一个可以耦合通道的路径。但是,40 kΩ电阻对通道间隔离的影响最小。最后,通道的直流输入电流应该非常相似,因为误差放大器在通道之间不会发生剧烈变化。该电路将使所有光通道彼此靠近的系统受益。
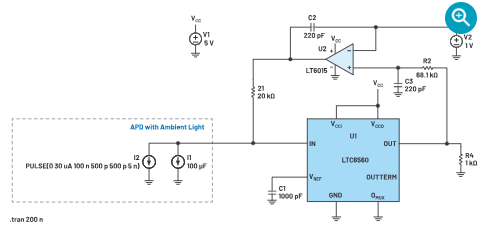
图4.LTspice仿真原理图。

图5.直流抵消模拟的输入和输出波形。
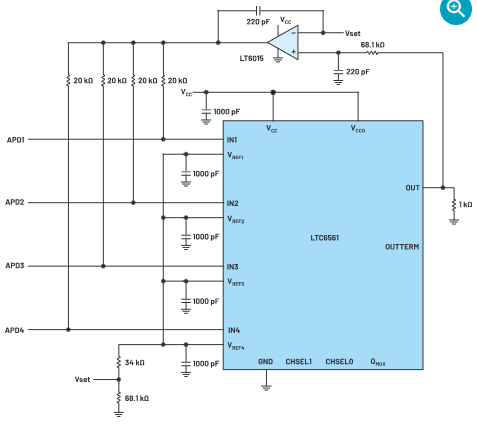
图6.用于 LTC6561 的直流消除电路。
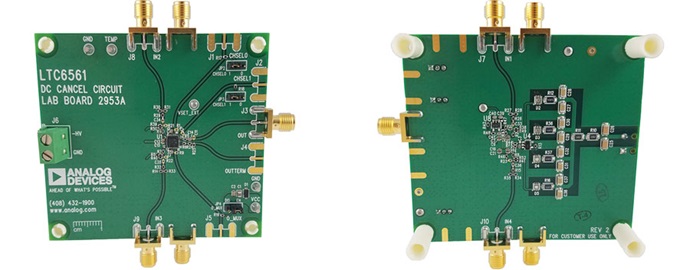
图7.LB2953A 直流取消电路板实验室板。
结果
制作了概念验证板以创建更具吸引力的文章并验证性能。如图 7 所示。正如预期的那样,直流消除电路主要由电路板布线和元件的寄生元件主导。该电路将积分噪声从非直流消除电路的64 nA rms增加到集成在66 kHz至100 MHz的直流消除电路的200 nA rms。 图8显示了使用和不使用直流消除电路时测量的折合到输入端的噪声密度。从该电路中移除APD,以找到没有TIA容性负载的本底噪声。这为非直流消除电路产生59 nA rms的积分噪声,对直流消除电路产生60 nA rms的积分噪声。但是,该电路旨在与检测器一起使用,并且应将电容包含在电路的性能中。
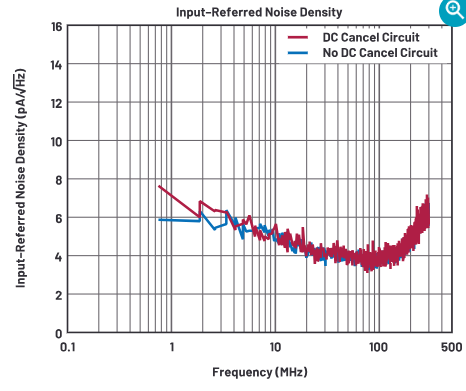
图8.折合到输入端的噪声密度。
结论
对 LTC6560 和 LTC6561 的输入进行交流耦合可能会带来一些挑战。最终,在少数情况下,交流耦合可以在对电路性能影响最小的情况下实现。在现代LIDAR系统中,为了最大限度地提高系统性能,所提出的直流消除电路可以提供最大的恢复时间性能,而不会影响电路噪声。这种性能的代价是布局的复杂性和积分误差放大器的功耗增加。
审核编辑:郭婷
-
放大器
+关注
关注
146文章
14298浏览量
220990 -
激光雷达
+关注
关注
977文章
4377浏览量
195342 -
TOF
+关注
关注
9文章
521浏览量
38148
发布评论请先 登录
空间激光雷达最小接收光功率的计算
激光雷达分类以及应用
激光雷达面临的机遇与挑战
激光雷达的核心重要指标到底是什么?
自动驾驶激光雷达新型探测器:近红外MPPC
让机器人在陌生环境里穿梭自如的激光雷达
TOF激光雷达
毫米波雷达VS激光雷达VS超声波雷达
激光雷达中的激光发射与接收光学原理
如何取消激光雷达接收器的环境光






 工商网监
工商网监
评论