 如何用ART-PI跑zephyr_polling的蓝牙?
如何用ART-PI跑zephyr_polling的蓝牙?

rtthread在ArtPi硬件平台下和AP6212蓝牙实现。
RT-Thread Studio下利用ArtPi实现蓝牙功能
搭建 RT-Thread Studio 环境
参考完成快速开始 (rt-thread.org) RT-Thread studio 环境的搭建。
新建 ART-Pi 示例工程
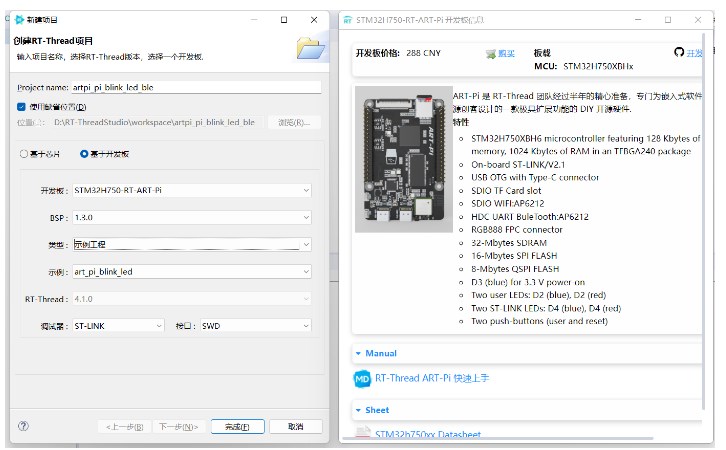
按照下图新建一个 art_pi_blink_led 示例工程,等待创建完成。
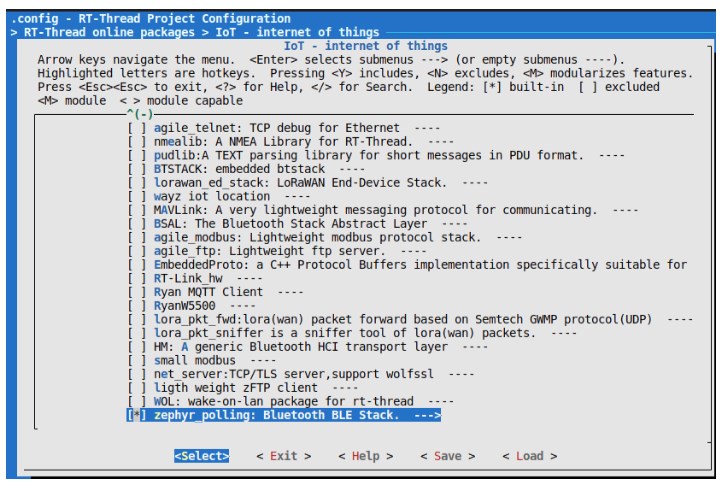
配置使用 zephyr_polling
进入工程 RT-Thread Settings 界面, 进入到软件包页面,找到zephyr_polling,并按照下面的参数配置好。
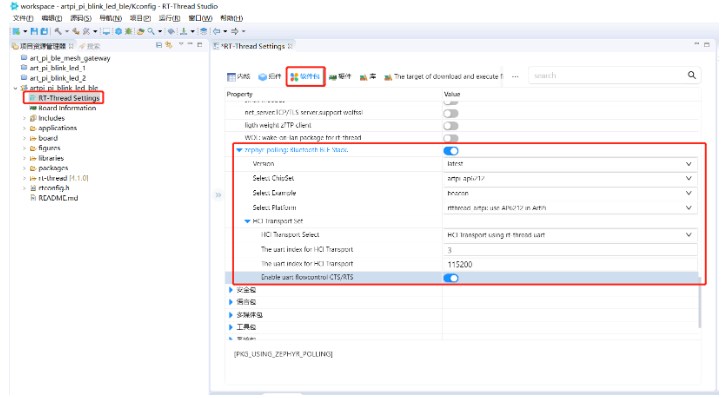
配置完成后保存,studio 将自动更新下载软件包。
配置相关串口
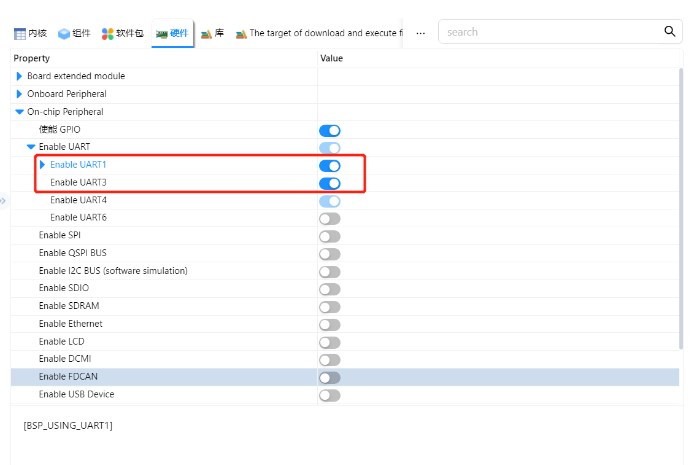
在 RT-Thread Settings 下硬件选项页中使能对应串口,如下图,按照实际需求开启。AP6212内部接的是UART3,所以UART3必须打开。
串口接收buffer记得调整一下。
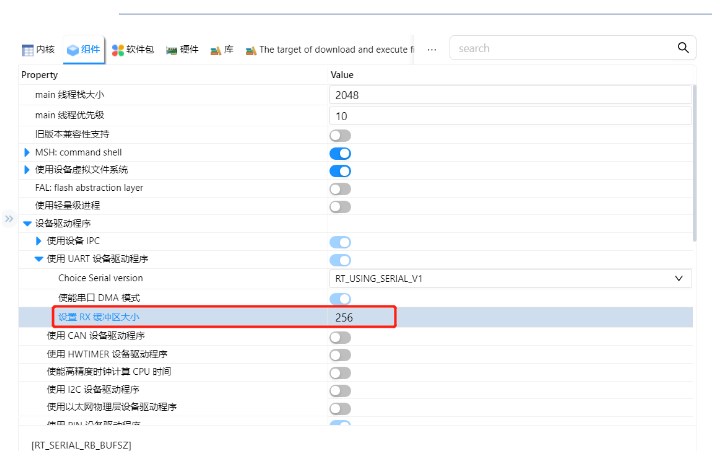
保存退出。
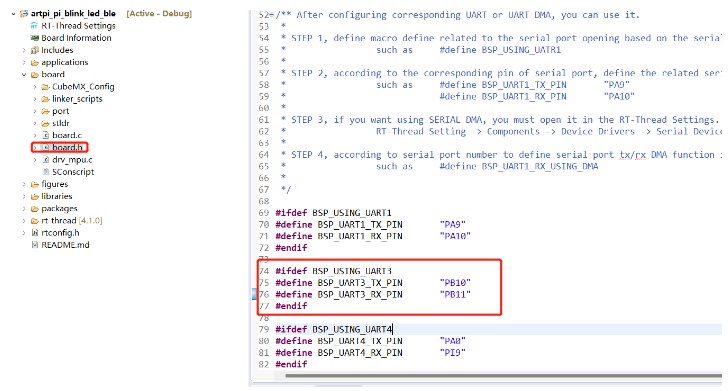
在 borad.h 头文件中添加对应串口的引脚定义。
编译运行
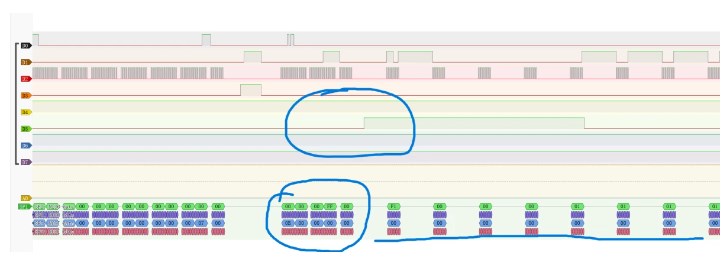
直接烧录进去即可,这里直接使用 ART-Pi 板载的 AP6216 芯片。而后输入zephyr_polling_init指令,启动beacon程序。
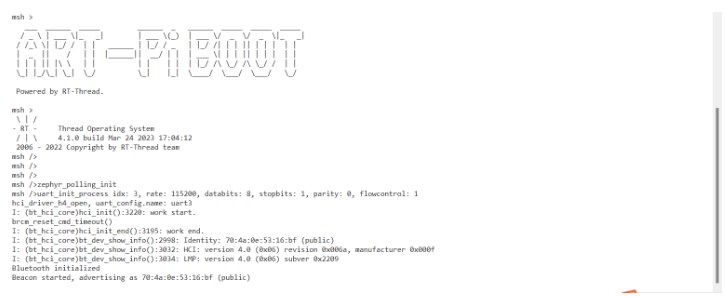
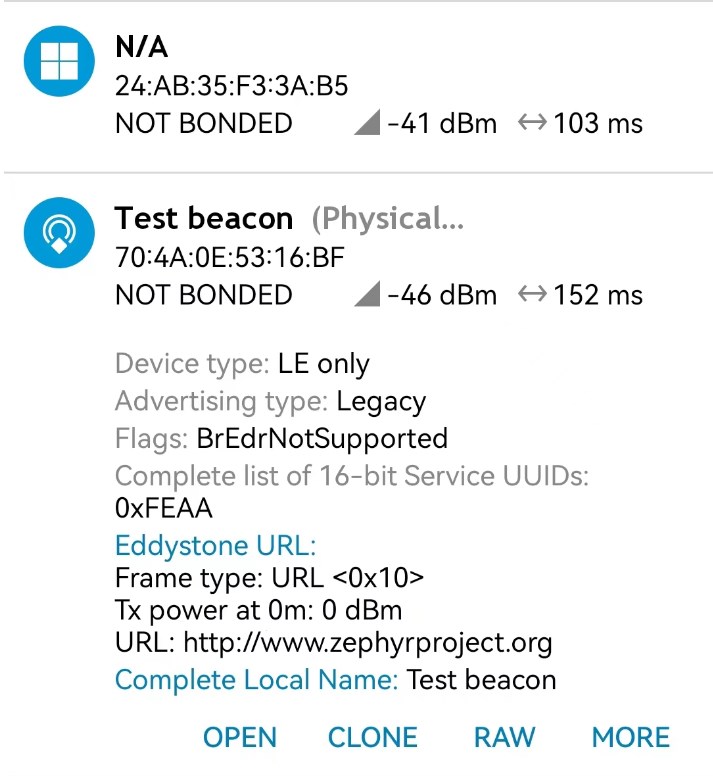
使用 nRF Connect 手机 APP 即可成功观察到蓝牙设备地址为704a0e5316:bf的beacon设备。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
UART接口
+关注
关注
0文章
125浏览量
16399 -
RTThread
+关注
关注
8文章
132浏览量
42825 -
ART-Pi
+关注
关注
0文章
23浏览量
1910
发布评论请先 登录
相关推荐
热点推荐

RTT平台zephyr_polling软件包SPI Bluenrg2芯片宕机问题与修复
项目的代码测试完成之后,准备收尾时,出现了问题。清除掉开发过程中用来调试的print打印之后,zephyr_polling 的 HCI 突然不能正常工作了,之前测试可用的 zephyr_polling 中的各个例程都不再能运行。
如何用Ubuntu qemu跑zephyr_polling的蓝牙?
进入 RT-Thread online packages → IoT - internet of things 目录即可看到 zephyr_polling软件包,勾选软件包。
ART-PI重力感应无线智能小车设计实现
ART-PI重力感应无线智能小车第一弹-----ART-PI扩展板设计雷德斯 and枕头们,小飞哥又又叒好久没更新文章啦,最近实在是太忙啦,大家久等啦,这次是系列文章,一步步教你如何在ART-PI上
发表于 02-10 06:39
基于ART-Pi Smart平台的设计方案推荐
在 ART-Pi Smart 平台上实现视频播放功能;由于ART-Pi Smart 没有音频模块,所以没有实现音频的解码播放。在上一篇分享中,我们在 ART-Pi Smart 平台上实现了视频解码
发表于 03-24 16:56
基于ART-Pi与SX1302的设计资料分享
1、基于 ART-Pi lora-pkt-sniffer 抓包工具抓取空口 LoRa 数据包 8 个并行的 LoRa BW125KHz 通道 支持 CRC 过滤机制 串口 shell 支持参数读写
发表于 04-01 16:36
关于ART-PI的基本使用例程简单描述
,使用静态IP与PC直连做测试。后续有需要,将ARI-PI通过路由器连接PC,可以随时再打开DHCP。5.保存Setting,编译,成功。2 基本测试1.将ART-PI通电并连接网线2.通过设备管理
发表于 06-01 15:06
NimBLE软件包在ART-Pi bsp工程下的使用
本文主要介绍 NimBLE 软件包的在 ART-Pi bsp 工程下的使用目前 NimBLE 支持 BLE Host 层,同时 bsp 工程下暂不支持使用 ART-Pi 板载的 AP6212 蓝牙
发表于 09-13 15:43
ART-Pi LoRa开发套件教程相关资料分享
1、ART-Pi LoRa 开发套件简介 ART-Pi LoRa 开发套件(LSD4RFB-2EVKM0201)是利尔达科技与睿赛德科技联合出品的一套面向物联网开发者的 LoRa产品原型设计工
发表于 09-30 11:57
【STM32H750】玩转ART-Pi(一)——使用STM32CUBMX生成TouchGFX工程
目录在ART-Pi H750上移植TouchGFX(一)——使用STM32CUBMX生成TouchGFX工程在ART-Pi H750上移植TouchGFX(二)——制作MDK的外部
发表于 12-28 19:20
•11次下载

【技术三千问】之《玩转ART-Pi》,看这篇就够了!
2.在 ART-Pi 平台有没有人成功使用 openocd 可以直接烧写到外部 Quad spi flash 的?[链接]
发表于 01-25 18:44
•2次下载
ART-PI重力感应无线智能小车第一弹——ART-PI扩展板设计
雷德斯 and 枕头们,小飞哥好久没更新文章啦,最近实在是太忙啦,大家久等啦,这次是系列文章,一步步教你如何在ART-PI上实现无线重力感...
发表于 01-25 19:27
•1次下载
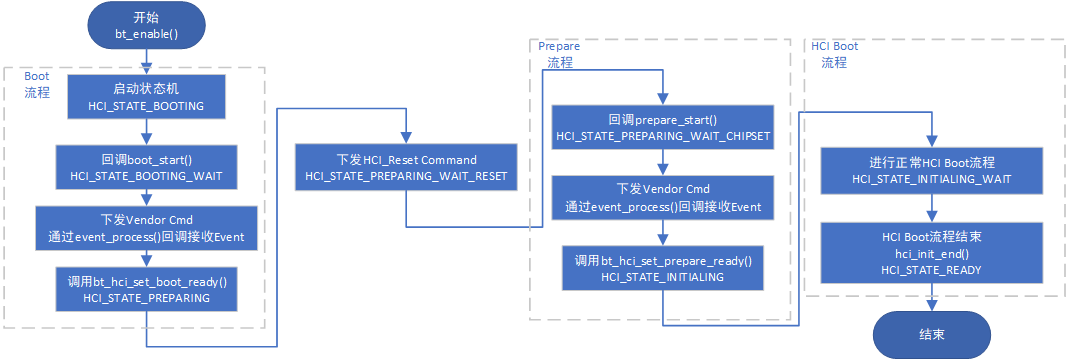
RT-Thread平台 zephyr_polling软件包 Bluenrg2 蓝牙芯片启动流程
RTT zephyr_polling软件包 Bluenrg2 蓝牙芯片启动流程 “开源之夏”“蓝牙HOST协议栈zephyr_polling完善” 项目个人记录 菜鸡参与项目的个人记录
RT-Thread ART-Pi二代正式发布
自2020年首次亮相以来,ART-Pi一代凭借其强悍的性能、丰富的资源以及极简的开发体验,迅速赢得了嵌入式工程师们的广泛赞誉,被誉为“开发利器”。随着市场对高性能嵌入式开发板需求的不断增长,以及技术



评论