 机器人掌控自主,远程IO模块携手前进
机器人掌控自主,远程IO模块携手前进

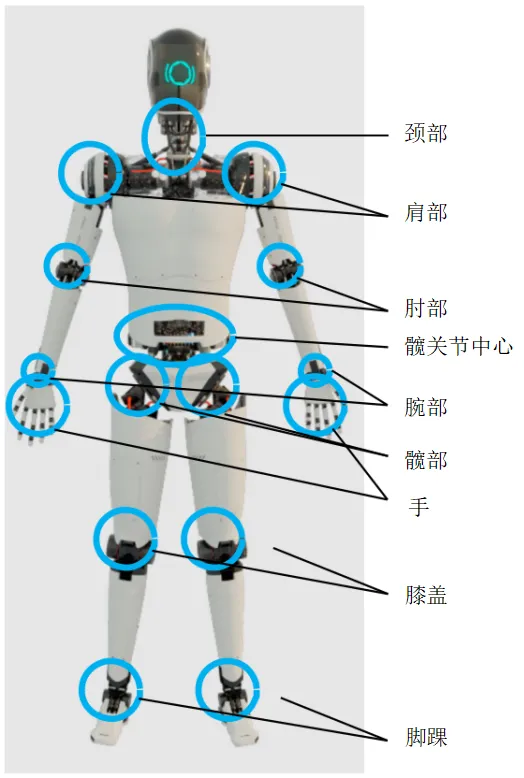
随着机器人技术的不断发展,协作机器人已经成为工业自动化的一个重要领域。协作机器人的出现,将机器人从传统的固定安装位置中解放出来,使得机器人可以更加灵活地应用到不同的生产场景中。然而,协作机器人通常采用PLC控制,在大型的自动化系统中,各设备分散分布,非常不便于信号的采集,通常会采用PLC+远程I/O的方案进行信号采集。
远程I/O,简单的讲远程I/O就是具有通信功能的数据采集/传送模块,自身没有控制调节功能。只是将现场数据送到控制中心,或者接受控制中心的数据,对现场设备进行控制,以往都是采用以太网和PLC或机器人等进行连接。
整个自动化系统中通常包括PLC主CPU、变频器、运动控制卡、工业机器人、电磁阀、继电器、仪器仪表、传感器等等。传统的项目中,所有的信号线都要送到主CPU, 这导致布线非常困难,线材成本也很高。如果采用了远程I/O,就可以通过一条通信线和PLC或机器人连接,实现分布式信号采集,由主PLC控制,各个远程I/O模块负责所在区域的数据,并通过通信线缆与主PLC进行通信;这样布线非常方便,处理速度非常快同时也节省了PLC自身的I/O点数。下面,介绍远程I/O模块
01 钡铼技术MxxT I/O模块概述
一款Modbus工业以太网总线接口,集成数字量输入和输出的独立式I/O模块。支持NPN/PNP型数字逻辑输入信号,并对捕获的信号进行限流、电气隔离的安全保护。
485、输入输出接口和以太网通信接口都拥有对应的LED指示灯,用于快速观察和诊断信号与指令状态。
02 主要特点:
1) 通信规约采用标准 Modbus TCP 协议、Modbus RTU over TCP 协议、MQTT 协议;
2) 采用工业级 32 位芯片,内置看门狗,并具有完善的防雷抗干扰措施,保证可靠性
3) 数字量输入采用光耦隔离,提供 12 路脉冲计数输入,支持干、湿接点输入类型;
模拟量输入采用运放隔离,支持 12 位的高精度数据采集,兼容 05V、010V、020mA、420mA 输入类型。
4) 宽工作电压 DC9-36V,并具防反接保护功能。
5) 总线通信故障指示灯。
6) 体积小,DIN35导轨安装。
MxxT I/O模块现场实施
01 设备安装
模块支持DIN35导轨安装,可以比较便利的放置在电气柜中。
02 安全接地
接地线有助于防止电磁干扰带来的影响。在连接设备之前,先通过接地螺丝接线让设备接地。 注:该产品宜安装在接地良好的器件表面,如金属板。
03 485接线
3) DI接线

- DO接线。
5) 模块上对应通道的输入、输出指示灯状态以确认信号通断。
总结
随着工业4.0时代的到来,提高工厂生产效率的需求日渐增强。数据采集在工厂的应用越来越广泛,同时,连接到网络的设备数量,比如制造设备,也在迅速增加。提供高效数据转换的远程I/O模块使高速率高精度控制成为可能,十分适用于用于需要高速率和高精度控制的如工业机器人、半导体生产、数控机床、光伏与风电以及过程控制等领域。
审核编辑 黄宇
-
机器人
+关注
关注
215文章
31800浏览量
224986 -
数据采集
+关注
关注
42文章
8456浏览量
121567 -
远程io
+关注
关注
0文章
98浏览量
2279
发布评论请先 登录
机器人超声波避障测距
江智康养机器人
百亿赛道启幕,谁在掌控机器人的“感官”?

基于米尔RK3576核心板的国产割草机器人解决方案
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
深度解读人形机器人电感产品需求及应用选型技巧
小萝卜机器人的故事
什么是机器人?追溯机器人技术的演变和未来

恩智浦自主移动机器人设计要点

最新发布!泰科机器人发布首款自研双足人形机器人

MR30分布式IO在喷绘机器人的应用




评论