 华为诺亚提出VanillaNet:一种新视觉Backbone,极简且强大!
华为诺亚提出VanillaNet:一种新视觉Backbone,极简且强大!

导读
简到极致、浅到极致!深度为6的网络即可取得76.36%@ImageNet的精度,深度为13的VanillaNet甚至取得了83.1%的惊人性能。
VanillaNet: the Power of Minimalism in Deep Learning
论文地址:https://arxiv.org/abs/2305.12972
代码地址:https://github.com/huawei-noah/VanillaNet
简而浅的直桶状网络具有非常优秀的推理效率,但其训练难度较高,难以取得优异性能。自AlexNet与VGG之后,鲜少有这种"直桶"状且性能优异的网络出现,其中的代表当属RepVGG与ParNet。
- 通过引入结构重参数机制,RepVGG将"直桶状"网络重新焕发生机。但RepVGG的深度仍然有20+的深度,感兴趣的同学可以查看让你的ConvNet一卷到底,清华&旷视提出CNN设计新思路RepVGG
- 后来,Princeton大学的邓嘉团队提出了深度为12的网络并在ImageNet数据集上达到了80.7%,但引入的注意力导致了额外的跳过连接,仍为达到极限推理效率。对ParNet一文感兴趣的同学可查阅12层也能媲美ResNet?邓嘉团队提出最新力作ParNet,ImageNet top1精度直冲80.7%
就在这样的环境下,简到极致、浅到极致的网络VanillaNet诞生了!!!深度为6的网络即可取得76.36%@ImageNet的精度,深度为13的VanillaNet甚至取得了83.1%的惊人性能。
网络架构
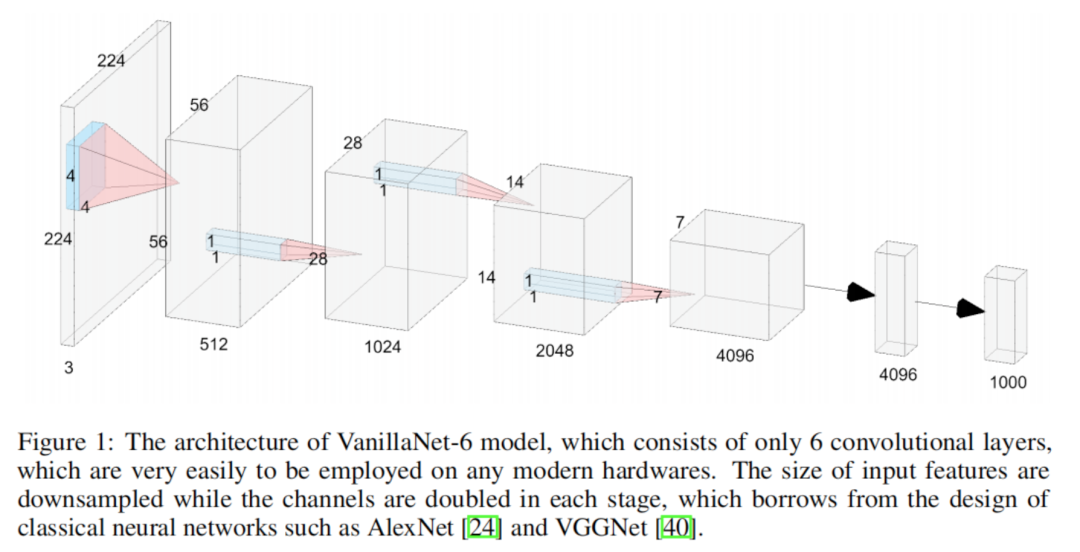
上图给出了本文所提VanillaNet架构示意图,有没有觉得简到极致了。
- 对于Stem部分,采用卷积进行特征变换;
- 对于body部分的每个stage,首先采用MaxPool进行特征下采样,然后采用一个进行特征处理;
- 对于head部分,采用两个非线性层进行分类处理。
值得注意的是,(1) 每个stage只有一个卷积;(2)VanillaNet没有跳过连接。
尽管VanillaNet非常简单且足够浅,但其弱非线性能力会限制其性能。为此,作者从训练策略与激活函数两个维度来解决该问题。
训练策略
在训练阶段,通过引入更强的容量来提升模型性能是很常见的。由于更深的网络具有比浅层网络更强的非线性表达能力,作者提出在训练阶段采用深度训练技术为VanillaNet带来更强的性能。
深度训练策略
对于激活函数,我们将其与Identity进行组合,公式如下:
其中,是用于平衡非线性能力的超参数。假设当前epoch与总训练Epoch分别表示为,那么定义。因此,在训练初始阶段,该修正版激活函数等价于原始激活函数,即,此时网络具有较强的非线性表达能力;伴随训练收敛,修正版激活函数退化为Identity,即,这就意味着两个卷积之间就不再有激活函数。
接下来,我们在说明一下如何合并两个卷积层(在DBB一文中已有了非常详细的公式介绍,而且对各种可折叠操作进行了非常详细的介绍)。
我们先来介绍BN与前接卷积之间的合并方式。假设表示卷积的参数,BN层的参数分别表示为,合并后的参数表示如下:
在完成卷积与BN合并后,我们介绍如何合并两个卷积。令分别表示输入与输出特征,卷积可表示如下:
基于上述卷积表示,我们可以将两个连续卷积表示如下:
因此,两个连续卷积可以进行合并且不会造成推理速度提升。
SIAF(Series Informed Activation Function)
尽管已有诸多非线性激活函数,如ReLU、PReLU、GeLU、Swish等,但这些它们主要聚焦于为深而复杂的网络带来性能提升。已有研究表明:简而浅网络的有限能力主要源于其弱非线性表达能力。
事实上,有两种方式可用于改善神经网络的非线性表达能力:堆叠非线性激活层、提升激活函数的非线性表达能力。现有方案往往采用了前者,前者往往会导致更高的推理延迟;而本文则聚焦于后者,即改善激活函数的非线性表达能力。
改善激活函数非线性能力能力的最直接的一种方式为stacking,序列堆叠也是深层网络的核心。不同与此,作者提出了共生(concurrently)堆叠方式,可表示如下:
其中,n表示堆叠激活函数的数量,表示每个激活的scale与bias参数以避免简单的累加。通过该处理,激活函数的非线性表达能力得到了大幅提升。
为进一步丰富表达能力,参考BNET,作者为其引入了全局信息学习能力,此时激活函数表示如下:
可以看到,当时,。也就是说,所提激活函数是现有激活函数的一种广义扩展。因其推理高效性,作者采用ReLU作为基激活函数。
以卷积作为参考,作者进一步分析了所提激活函数的计算复杂度。卷积的计算复杂度可表示如下:
所提激活函数的计算复杂度表示为:
进而可以得出两者之间的计算复杂度比例关系如下:
以VanillaNet-B第4阶段为例,,该比例约为84,也就是说,所提激活函数的计算复杂度远小于卷积。
classactivation(nn.ReLU):
def__init__(self,dim,act_num=3,deploy=False):
super(activation,self).__init__()
self.deploy=deploy
self.weight=torch.nn.Parameter(torch.randn(dim,1,act_num*2+1,act_num*2+1))
self.bias=None
self.bn=nn.BatchNorm2d(dim,eps=1e-6)
self.dim=dim
self.act_num=act_num
weight_init.trunc_normal_(self.weight,std=.02)
defforward(self,x):
ifself.deploy:
returntorch.nn.functional.conv2d(
super(activation,self).forward(x),
self.weight,self.bias,padding=(self.act_num*2+1)//2,groups=self.dim)
else:
returnself.bn(torch.nn.functional.conv2d(
super(activation,self).forward(x),
self.weight,padding=(self.act_num*2+1)//2,groups=self.dim))
def_fuse_bn_tensor(self,weight,bn):
kernel=weight
running_mean=bn.running_mean
running_var=bn.running_var
gamma=bn.weight
beta=bn.bias
eps=bn.eps
std=(running_var+eps).sqrt()
t=(gamma/std).reshape(-1,1,1,1)
returnkernel*t,beta+(0-running_mean)*gamma/std
defswitch_to_deploy(self):
kernel,bias=self._fuse_bn_tensor(self.weight,self.bn)
self.weight.data=kernel
self.bias=torch.nn.Parameter(torch.zeros(self.dim))
self.bias.data=bias
self.__delattr__('bn')
self.deploy=True
本文实验
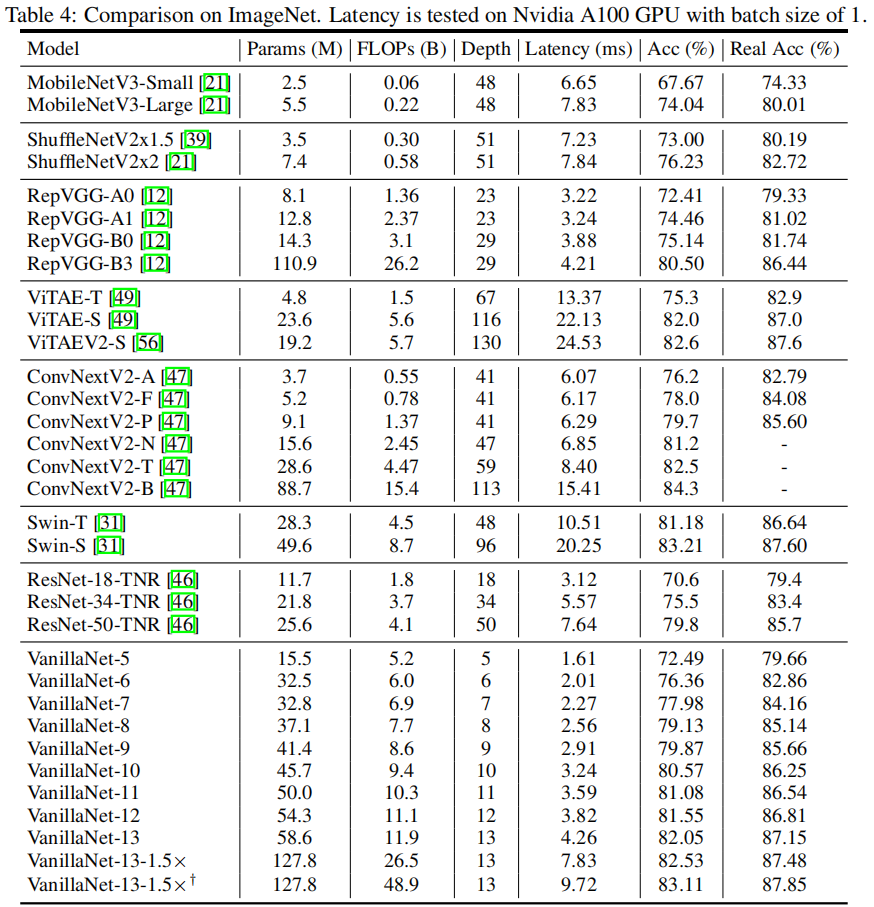
在过去几年里,研究人员往往假设计算资源非常有限,依托ARM/CPU平台,聚焦于减少网络的FLOPs与推理延迟。但是,伴随着AI芯片的研发进展,像自动驾驶等设备往往携带多个GPU以期获取实时反馈。因此,本文的延迟基于bs=1进行测试,而非常规的吞吐量。基于此配置,作者发现:模型的推理速度与FLOPs、Params的相关性极低。
- 以MobileNetV3-Large为例,尽管其具有非常低的FLOPs,但其GPU延迟为7.83,远高于VanillaNet13。这种配置的推理速度与复杂度和层数强相关;
- 对比ShuffleNetV2x1.5与ShuffleNetV2x2,尽管其参数量与FLOPs差别很大,但推理速度基本相同(7.23 vs 7.84);
- 对比ResNet,VGGNet与VanillaNet可以看到:无额外分支与复杂模块的的VGGNet、VanillaNet具有更高的推理速度。
基于上述分析,作者提出了VanillaNet这样简到极致,无任何额外分支,层数更少的架构。如上表所示,
- VanillaNet9取得了79.87%的精度,推理速度进而2.91ms,比ResNet50、ConvNeXtV2-P快50%;
- 当扩展至VanillaNet13-1.5x后,甚至取得了83.11%的指标。
这是不是意味着在ImageNet分类任务上,我们并不需要深而复杂的网络呢???
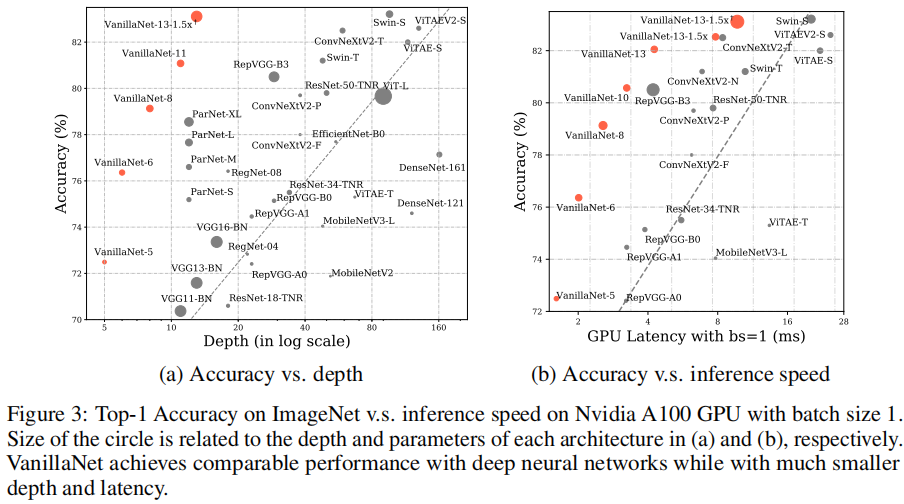
上图给出了不同架构深度与推理速度之间的关系图,可以看到:
- 当bs=1时,推理速度与网络的深度强相关,而非参数量。这意味着:简而浅的网络具有巨大的实时处理潜力。
- 在所有网络中,VanillaNet取得了最佳的速度-精度均衡。这进一步验证了:在计算资源充分时所提VanillaNet的优异性。
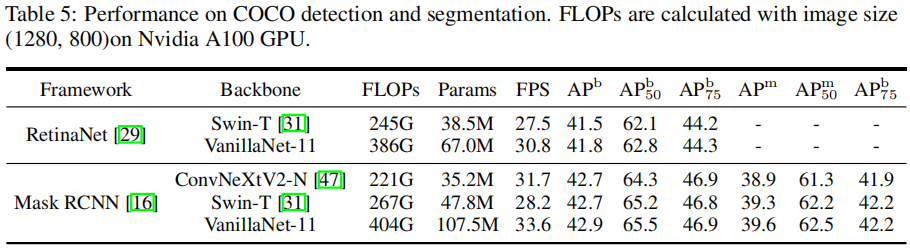
按照国际惯例,最后附上COCO检测任务上的对比,见上表。可以看到:所提VanillaNet取得了与ConvNeXt、Swin相当的性能。尽管VanillaNet的FLOPs与参数量更多,但其推理速度明显更快,进一步验证了VanillaNet在下游任务的有效性。
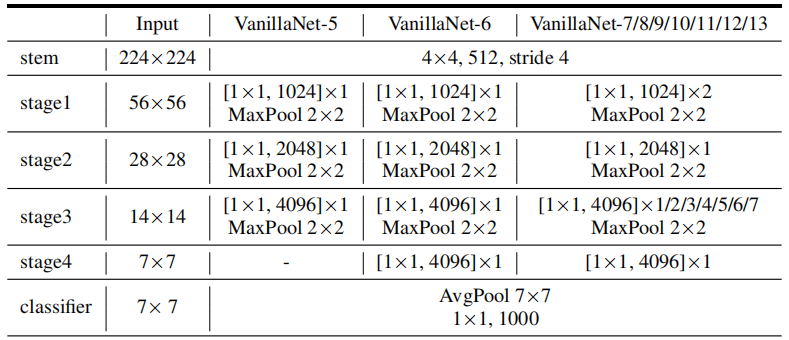
最后附上不同大小模型的配置信息,参考如下。
全文到此结束,更多消融实验建议查看原文。
审核编辑 :李倩
-
数据集
+关注
关注
4文章
1230浏览量
26046 -
cnn
+关注
关注
3文章
355浏览量
23249
原文标题:华为诺亚提出VanillaNet:一种新视觉Backbone,极简且强大!
文章出处:【微信号:CVer,微信公众号:CVer】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
还在为非标项目单独开发视觉软件?你out了!labview通用视觉框架,真香!
求大佬分享一种基于毫米波雷达和机器视觉的前方车辆检测方法
一种结构化道路环境中的视觉导航系统详解
诺亚音乐球与诺亚光感器的发布,智能音乐时代就在不远的将来
一种改进的视觉词袋方法
华为发布“极简5G”建设策略_助力5G发展进入快车道
华为提出“极简、智能、开放”站点策略,助力加速5G商用部署
天津联通正在打造极简架构的5G共享网络
CurcveLane-NAS:华为&中大提出一种结合NAS的曲线车道检测算法

谷歌提出PaLI:一种多模态大模型,刷新多个任务SOTA!

基于M55H的定制化backbone模型AxeraSpine






 工商网监
工商网监
评论