 Linux哪吒D1的NodeRed机械臂控制与拍照(一)
Linux哪吒D1的NodeRed机械臂控制与拍照(一)

一、 背景
设备控制安全一直是我最想解决的一个问题,这就需要创建个人服务器,最大限度的保障安全。为了能够实现安全控制和控制速度。我想到了Node-Red来解决这个,它提供了丰富的节点,可以实现你想要的功能,例如USB摄像头,串口,mqtt等都可以轻松实现,但是就需要写一些js代码。
关于机械臂的部分主要是用舵机来控制,是通过一块单片机板子来实现驱动,那么node-red则通过串口与板子进行串口通讯实现对舵机的控制。
二、方案功能汇总如下:
1、腾讯连连的MQTT节点连接腾讯云
2、驱动海康威视摄像头实现摄像头拍照功能并显示的在页面上
3、node-red的串口节点与单片机通讯
4、进度条功能实现实时输出串口数据控制舵机
5、设置方向控制按钮
三、硬件设计
1、硬件主要有哪吒D1开发板,运行Debian linux操作系统
2、海康威视摄像头,实现监控
4、5个舵机:通过PWM控制,其中一个用来控制转向
5、1个电机:通过MOS管驱动
四、软件设计
连接腾讯云平台:
登录后选择控制台

选择物联网开发平台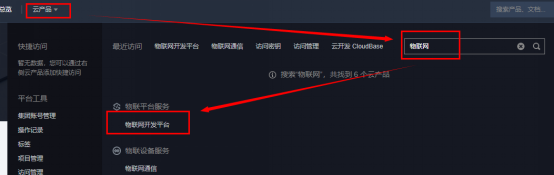
创建项目:

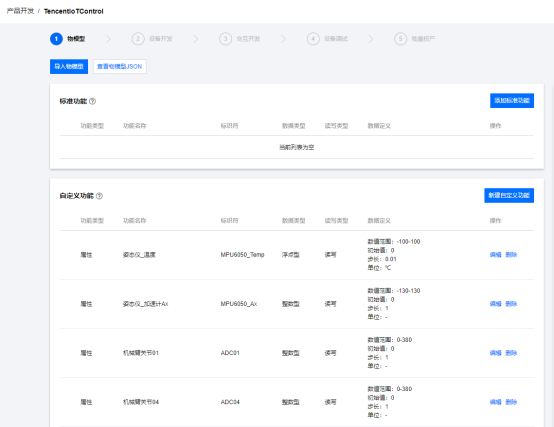
创建产品:

设置数据模板:
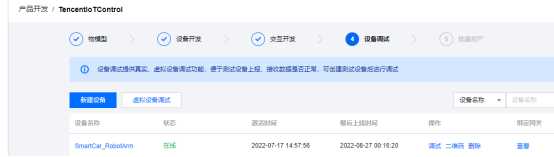
创建设备:
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
usb
+关注
关注
60文章
8474浏览量
285766 -
Linux
+关注
关注
88文章
11810浏览量
219513 -
服务器
+关注
关注
14文章
10345浏览量
91739 -
机械臂
+关注
关注
14文章
601浏览量
26184 -
MQTT
+关注
关注
5文章
738浏览量
25248
发布评论请先 登录
相关推荐
热点推荐
d1哪吒开发板的启动流程分析
1.本文概述
2.D1上电后启动的第一个程序
3.启动SPL
4.启动opensbi
5.裸机程序的编写
6.小结
1.本文概述
从RISCV生态的角度上来看,
发表于 10-29 06:44
如何在D1哪吒开发板商适配或者移植阿里小程序呢
阿里基于D1哪吒开发板适配的阿里小程序框架源码释放,后续将会有更多文档放出,开发者可以在D1哪吒开发板商适配或者移植阿里小程序。详情请见平头哥OCC平台:https://occ.t-h
发表于 12-28 06:50
D1哪吒开发板是什么?有何作用
前两天,从同学手中拿到了全志的D1哪吒开发板,同时也烧好了tina的镜像。使用厂商发的串口数据线,是一个ft232驱动的串口线,所以使用线连接之前,先安装了ft232的驱动。波特率:115200上电
发表于 02-11 07:18
D1哪吒开发板rt-smart内核固件的烧写与运行步骤
前言全志 allwinner D1 哪吒开发板基于RISC-V 64位架构,平头哥64位C906核心,默认运行Linux系统,通过简单的修改,可以运行rt-smartrt-smart 当前不能直接从
发表于 06-17 11:06
哪吒 D1 通过 TF 卡运行 Arch Linux RISC-V rootfs
RISC-V TF 启动卡那接下来,先制作 Debian RISC-V TF 启动卡,请参考:「RVBoards-哪吒」D1 Debian系统镜像和安装方法另外,上面没提到的坑也需要修复一下。2.1 修复可能
发表于 08-31 11:21
d1哪吒开发板的启动流程分析
1.本文概述
从RISCV生态的角度上来看,D1哪吒开发板确实是一块不错的可以研究很深的开发板。本文主要从研究D1启动流程的角度出发,探索
发表于 08-16 08:16
Linux哪吒D1的NodeRed机械臂控制与拍照(二)
以下是使用node-red实现的本项目各项重要功能,关于node-red的安全可以自己参考网上的安装教程,一般要先安装node.js,安装好之后才能正常调用npm功能安装node-red。这个过程让
哪吒D1 TinaSDK添加SSH server功能
SSH server作为linux系统的一个重要功能,极大的方便了用户的使用,下文介绍在哪吒D1TinaSDK上增加SSH server功能的步骤




评论