 咖啡机器人如何实现液体流量控制
咖啡机器人如何实现液体流量控制

咖啡机器人是近年来的一种智能化设备,它的出现大大提高了人们对咖啡制备的要求。在制作咖啡的过程中,液体流量控制是非常重要的一项工作。液体流量控制能够保证咖啡的品质和口感,因此在咖啡机器人的设计中液体流量控制是至关重要的。下文将介绍如何利用霍尔流量计实现液体流量控制。
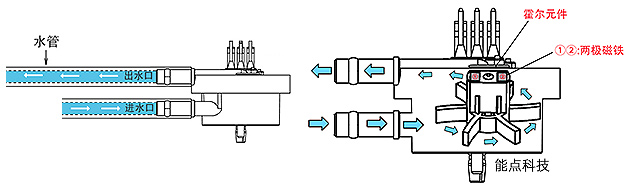
首先,我们需要了解霍尔流量计的原理。霍尔流量计是一种用来测量流体流量的设备,它利用了霍尔效应的原理,通过测量磁场的变化来确定流体流量。其工作原理是通过导电性管道中的磁场感应器将感应到的信号转换成电信号,然后这个电信号通过数字处理器进行处理,最终输出流体流量的实时数据。
然后,我们需要将霍尔流量计与咖啡机器人连接起来。在咖啡机器人中,将霍尔流量计安装在液体管路的某个位置,然后将霍尔流量计与控制模块连接。在控制模块中设置液体流量控制参数,如流量大小,流量变化速度等。当咖啡机器人启动时,液体从储存槽中流过霍尔流量计,霍尔流量计会感应到液体流动的速度,并将数据传输给控制模块。控制模块根据输入的数据和设定的参数,控制电磁阀的开闭,从而实现液体流量控制。
最后,我们需要注重日常维护。为了确保咖啡机器人的正常工作,我们需要定期对霍尔流量计进行清洗和维护,确保其灵敏度和准确性,并及时更换磁场感应器和控制模块中的相关元件,保证咖啡机器人的整体运作。
综上所述,利用霍尔流量计实现液体流量控制在咖啡机器人的设计中有着重要的作用,并可以大大提高咖啡的品质和口感,为人们带来更好的咖啡体验。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31455浏览量
223678 -
流量计
+关注
关注
11文章
1640浏览量
58649
发布评论请先 登录
相关推荐
热点推荐
20毫升每分钟的光电微流量计在咖啡机饮水机的应用
流量计RLL2518G,凭借专属的超小流量测量优势、先进的光电检测技术及良好的场景适配性,成为咖啡机、饮水机的优选配套元器件,精准破解设备微小流量控制痛点,为饮品设备的智能化、精细化升

MediaTek Genio 510物联网芯片重新定义智能咖啡机
现代消费者对咖啡机的期待,已不再局限于基础的制作功能。在 AI 的加持下,咖啡机能够实现个性化设置、语音指令控制、应用程序远程操作以及预测性维护等功能。「AI+
移动咖啡机器人上岗!杰和算力板卡成高效服务“隐形引擎”
导语春节期间,深圳某公园“移动摊位”内,移动咖啡机器人已正式上岗制作咖啡,每天8小时营业,平均2分钟即可完成一杯咖啡或冰淇淋。它动作灵活、流程井然,精准完成取杯、冲煮、出杯等工序,消费者下单后

瑞之辰压力传感器满足自动咖啡机的高精度技术要求
压力传感器在自动咖啡机的应用场景,主要在于咖啡萃取压力精准控制、水泵压力闭环调节、奶泡系统压力调节和锅炉压力安全保护等方面。随着自动咖啡机市场的不断扩张,

瑞之辰温压一体传感器:精准控制咖啡机水位,优化内部空间
咖啡机厂商在生产过程中,都十分注重咖啡机使用过程中的水位控制,低液位和高液位都须有报警提醒:当水位过低时,机器会发出低液位报警,提醒及时加水,以防止干烧并确保煮
【前瞻技术布局】咖啡机器人:具身智能技术首阶段探索与实践
-动作”大模型等方法研究。本文主要以第一阶段 咖啡机器人 任务场景为切入点,来阐述所取得的技术突破,以及后续技术优化方向。如下是机器人全程自主完成打咖啡的视频。 二、问题定义和路径选择 具身智能,指的是配备实体身躯、支持物

机器人内部零配件的生产加工厂从哪找?
适合加工具有复杂曲面的零件,如咖啡机的冲煮头、蒸汽喷嘴等。
东莞市力存科技有限公司拥有 12 台 CNC(四轴、五轴)加工中心 ,这些设备能够实现五轴联动加工,特别适合加工形状复杂的机器人配件。例如,在
发表于 12-09 18:22
精准调控,香醇每一杯:捷捷微电可控硅与光耦方案赋能咖啡机智能调速新体验
电子技术的深度应用,咖啡机已实现从磨粉、压粉到冲泡、清洁的全流程自动化控制。在这一技术演进历程中,捷捷微电凭借在功率半导体领域的深厚积累,为咖啡机行业提供高可靠性的可控

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
ISP多媒体接口,适合构建机器人视觉-运动融合系统,实现工件识别与动态定位。
3. 支持闭环控制与误差校正
可结合高分辨率编码器反馈数据,运行机器人闭环
发表于 11-14 15:48
刷脸喝咖啡?乐鑫科技ESP32-P4+摄像头方案,改写咖啡机的规则
你理想的咖啡瞬间是什么?是走进常去的一家咖啡店,无需开口,咖啡师会意一笑开始制作?没有人能拒绝一杯“见过你,就懂你”的咖啡。启明云端用技术打造“被记住”的贴心,ESP32-P4共享

咖啡机精准萃取:铝电解电容为加热回路 “把控” 电流节奏
在咖啡机的世界里,精准萃取是评判一杯咖啡品质的关键指标之一。要实现这一目标,除了咖啡豆的品质、研磨度、水温等因素外,加热回路的稳定性也起着至关重要的作用。而铝电解电容,作为一种常见的电

工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
智能语音赋能,NV400F音频OTA芯片方案无人自助咖啡机的变革性突破!
在快节奏的现代生活中,无人自助咖啡机正悄然兴起,为人们带来便捷的咖啡享受。但如何让这些咖啡机更加智能、易用,成为了行业发展的关键。今天,我们要为大家介绍一款能够让无人自助咖啡机

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05



评论