 EtherCAT运动控制器中脉冲接口的快速调试与诊断
EtherCAT运动控制器中脉冲接口的快速调试与诊断
脉冲型驱动器试运行可借助ZDevelop软件快速验证,主要包含以下四个部分:硬件接线,ZDevelop连接控制器,配置轴参数,发送运动命令查看电机是否转动。若无法运行参见问题排查部分解决。
01脉冲轴驱动器试运行流程
一、硬件接线
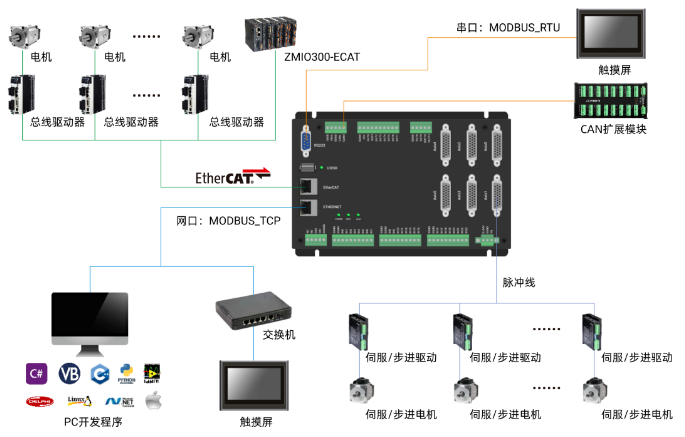
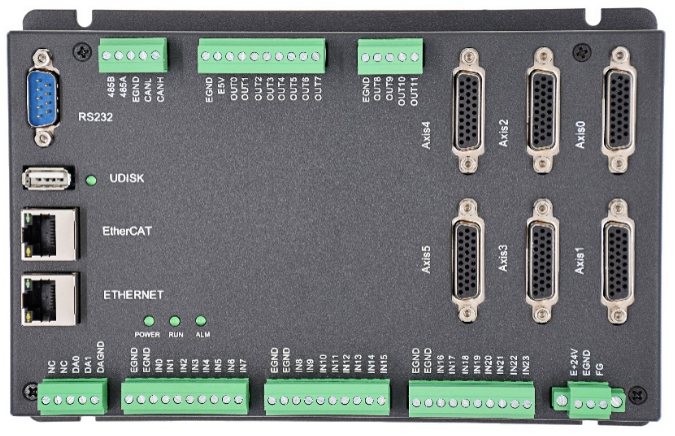
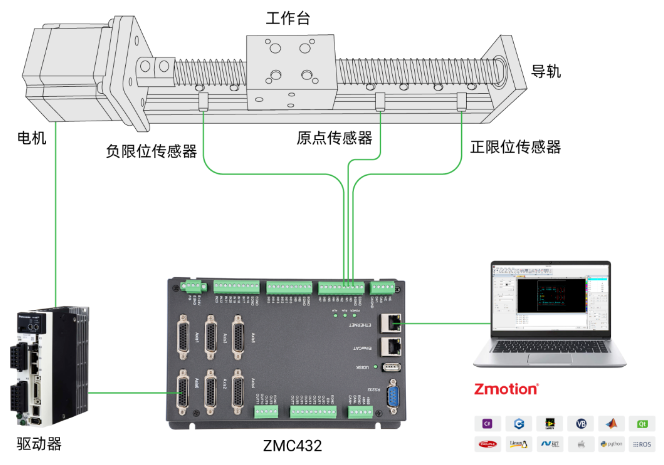
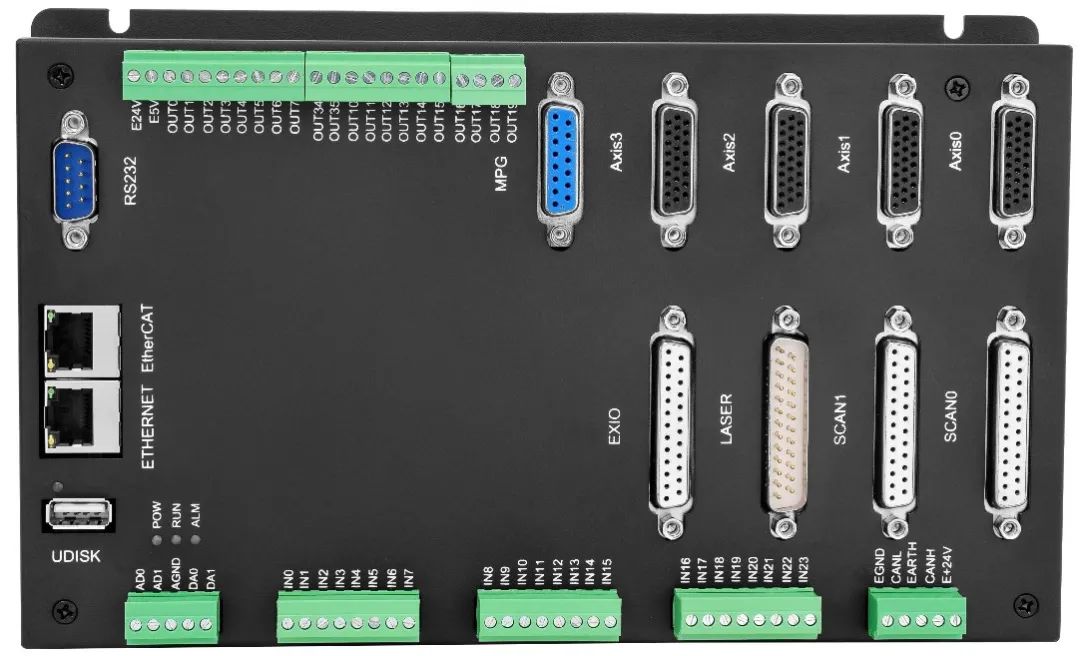
以ZMC432总线运动控制器为例,支持EtherCAT、EtherNET、RS232、RS485、CAN、U盘等通讯接口,观察控制器上的硬件接口,控制器参考架构如下图。
可通过EtherNET网口或RS232串口连接到ZDevelop软件完成试运行。
1.脉冲接口
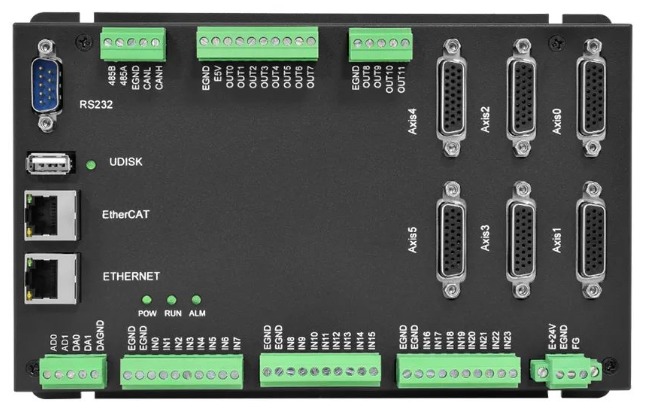
正运动技术大部分控制器的脉冲控制接口为面板上提供的DB26母头的端子,例如下图ZMC432的AXIS端子,板载6个脉冲轴的接口。
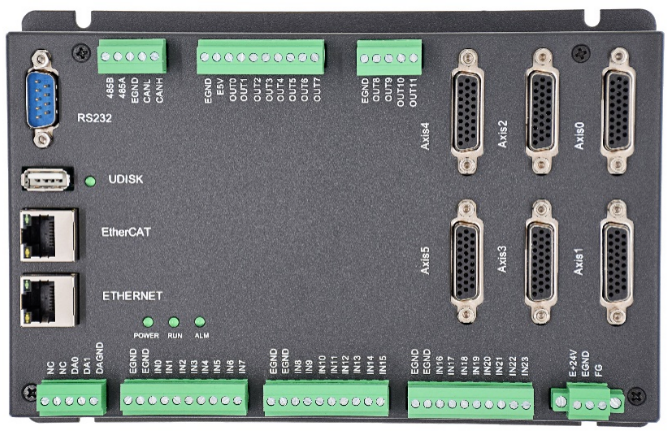
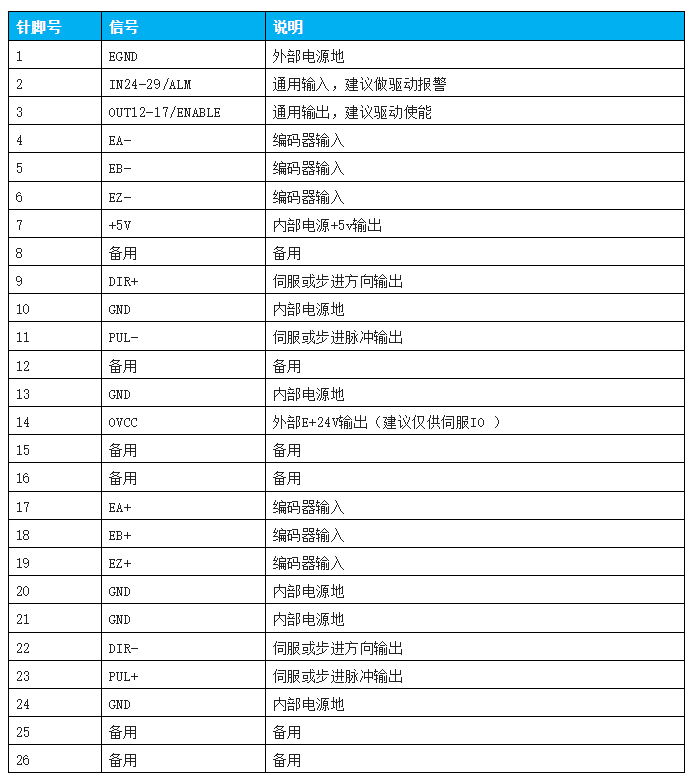
AIXS端子内主要包含脉冲输出的接线端子,编码器反馈的接线端子,驱动器的使能和报警信号,5V电源输出和公共端,如下表所示。
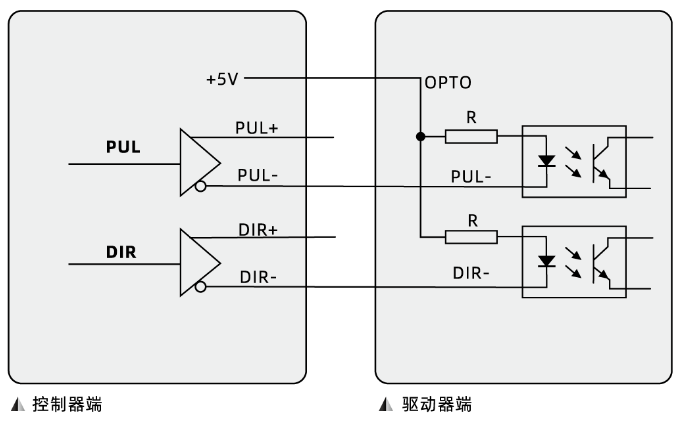
参考下图完成控制器与驱动器的脉冲控制接线,采用了差分接法,脉冲输出包含四个端子PUL+、PUL-、DIR+、DIR-,分别与驱动器一一对应连接即可。带编码器反馈的驱动设备,差分接线方式是将EA+、EA-、EB+、EB-、EZ+、EZ-分别连接编码器。再将针脚3接入驱动器的使能端子上,用于控制器给驱动器上使能信号。参考上图。
AXIS 0 轴接口端子内的使能信号为OUT12;
AXIS 1 轴接口端子内的使能信号为OUT13;
依此类推。
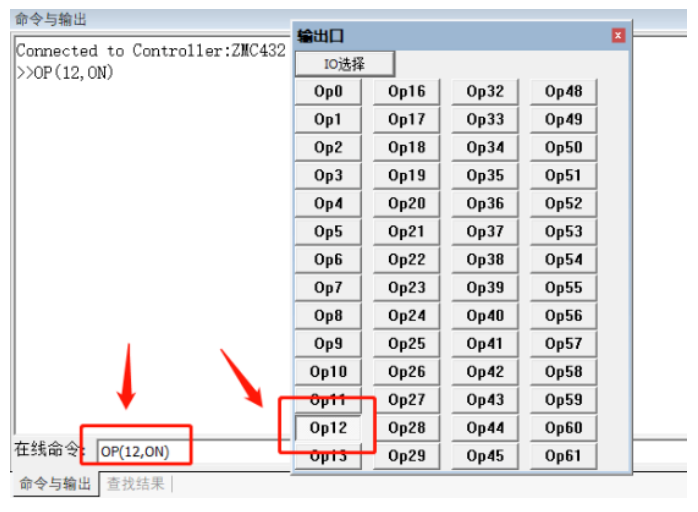
使能操作:OP(12,ON),OP(13,ON)等。
驱动器报警信号通过针脚2传入控制器,参考上图。
AXIS 0 轴接口端子内的报警信号为IN24;
AXIS 1 轴接口端子内的报警信号为IN25;
依此类推。
驱动器报警输入信号需要使用ALM_IN指令配置:ALM_IN(0)=24,ALM_IN(1)=25等。
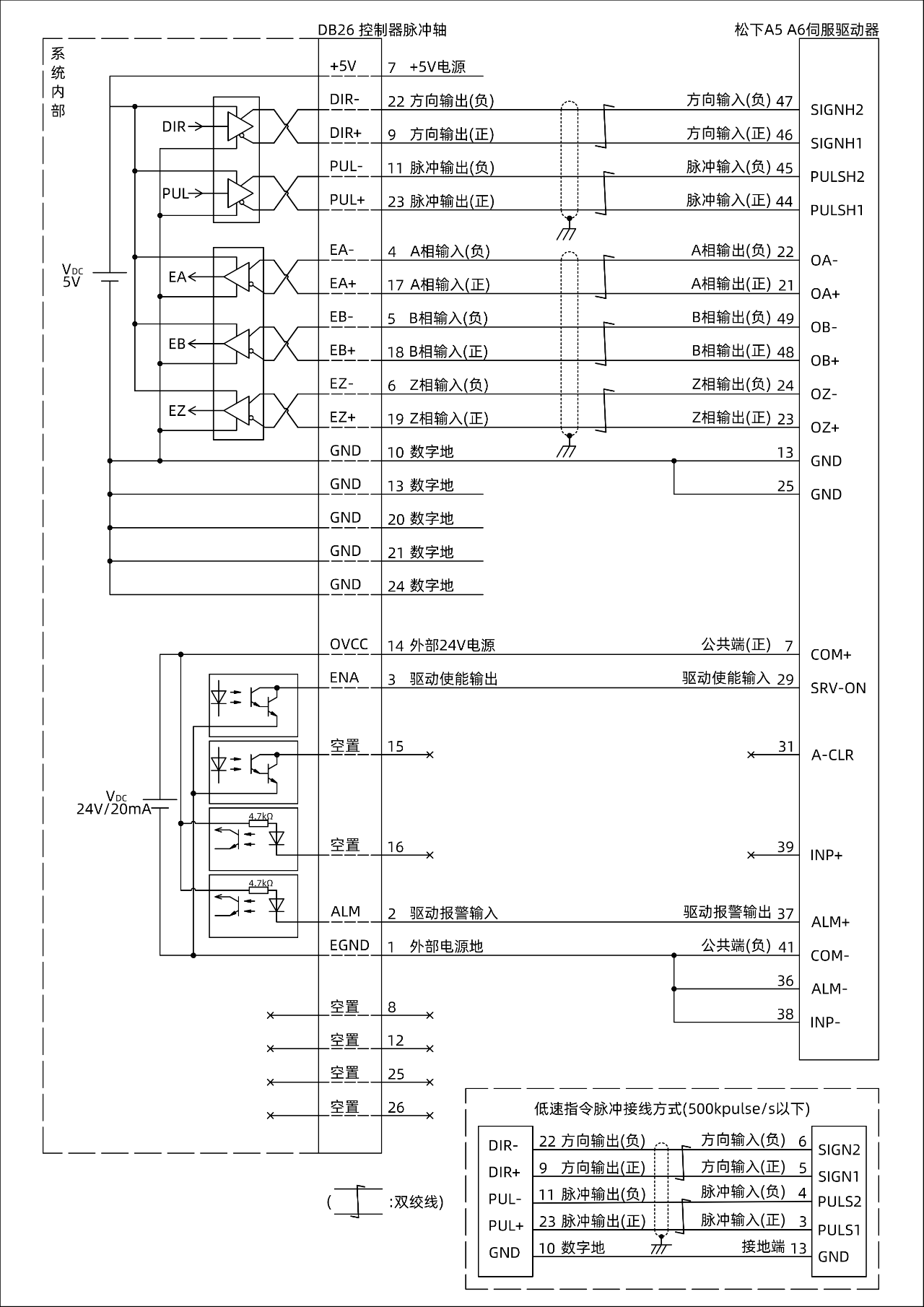
脉冲的单端连接方式如下图,下图采用共阳极的接法,将驱动器的公共端接入DB26提供的+5V端子上。
编码器的单端接线图如下,编码器的A,B(无Z信号的型号只接AB两相)与控制器正端子EA+、EB+一一对应连接,控制器的负端子悬空,编码器的0V或地线端子,连接控制器轴接口内的GND端子即可,再按编码器的供电要求接入电源。
2.IO接口
如下图,ZMC432支持6路脉冲轴控制,IO口分普通IO口和高速IO口,普通IO口的响应频率为10KHz,高速IO口的响应频率为500KHz,ZMC432的高速IO口除了响应更快之外,部分还集成了特殊功能,参见下文说明。
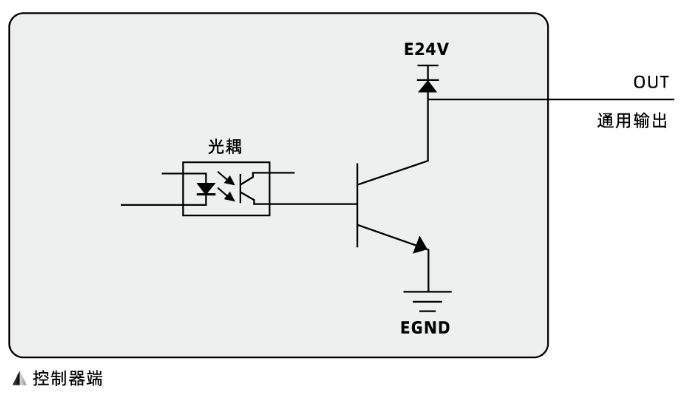
(1)输出口
输出口内部电路如下图,输出口0-1支持PWM脉冲宽度调制输出,同时还支持高速硬件比较输出(PSO功能)。
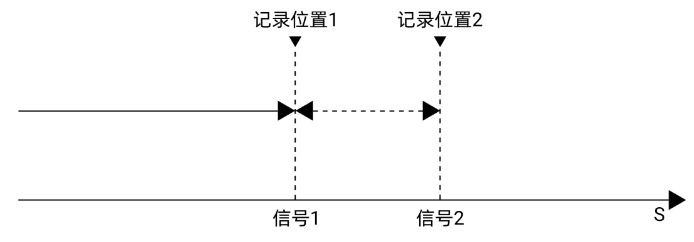
PSO功能:PSO(positionsynchronizedoutput)即位置同步输出,本质是通过采集实时的编码器反馈位置(无编码器可使用输出的脉冲位置)与比较模式设定的位置进行比较,控制OP高速同步输出信号,PSO示意图如下。
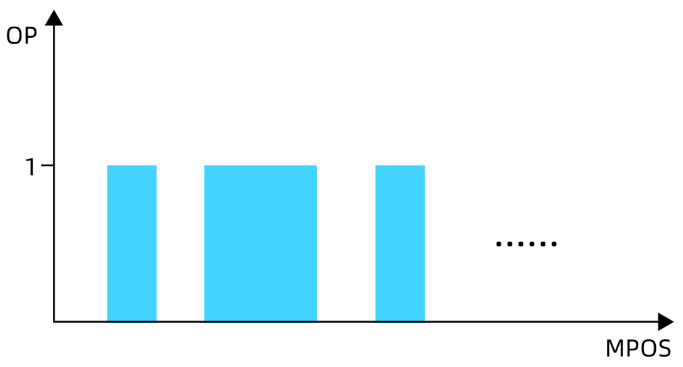
PSO一般与激光器(或点胶喷射阀等设备)同步输出信号进行相位同步,在运动轨迹的所有阶段以恒定的空间(或恒定时间)间隔触发输出开关,包括加速、减速和匀速段,从而实现脉冲能量均匀地作用在被加工物体上。
PSO功能的特点就是能高速且稳定的输出信号,因为输出精度足够高,所以能够在整个运动轨迹中以固定的距离触发输出信号而不用考虑总体速度,即在直线部分以很快的速度运动,而在圆角部分减速的同时也能保证输出间距恒定。
通常圆角加工部分在整个加工过程中占有比较小的部分,这样在保证加工效果的同时,就可以最大限度地提高产能。

PSO功能由HW_PSWITCH2指令实现,此指令有多种模式,支持等距输出、固定周期输出,自定义位置输出等,精度高,响应快,具体应用方法参见历史文章。
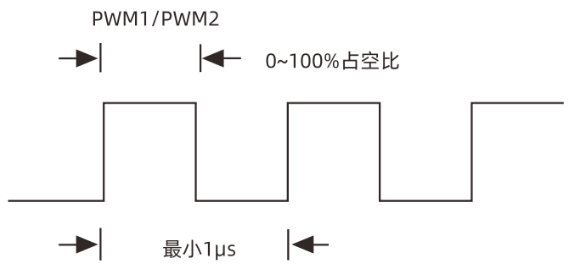
PWM功能:对支持PWM的OUT开启PWM功能,需设置PWM的频率和占空比,用于点胶阀的流速控制、激光器的功率控制等场合。
(2)输入口
输入口内部电路如下图,输入口IN0-1支持锁存功能。
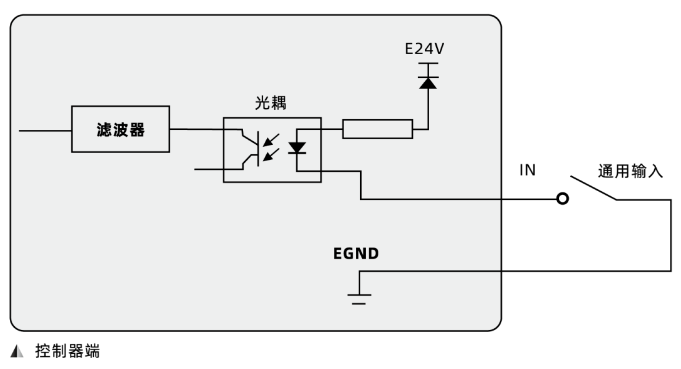
锁存:通过传感器输入信号,输入口快速响应并锁存编码器当前的位置信息,支持单次锁存和连续锁存。
二、ZDevelop连接控制器
采用正运动的ZDevelop开发软件可快速完成设备的试运行,控制器一般使用网口连接到ZDevelop,选择IP地址连接,默认出厂IP:192.168.0.11,注意控制器需与PC处于同一网段。
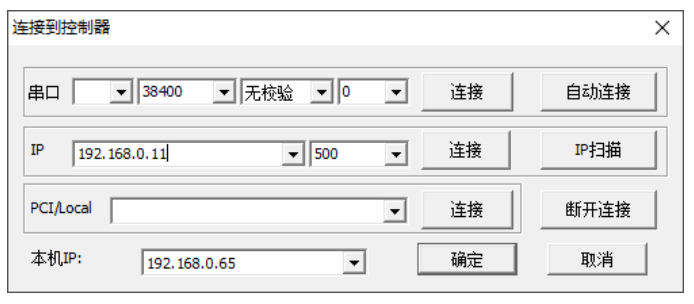
也可以使用串口连接控制器,串口默认参数波特率38400,数据位8,无校验,掉电后恢复默认参数。
三、配置脉冲轴参数
连接控制器之后先使能驱动器,根据硬件手册描述的轴接口内的使能信号OUT编号,发送OP(ionum,ON)打开使能,例如ZMC432发送OP(12,ON)使能AXIS 0上的驱动器。
在线命令发送或视图“输出口”操作OP,上电即使能的步进驱动无需此操作。
以下轴参数可在“视图”-“手动运动”或“轴参数”窗口快速配置,或新建工程写入指令语句下载到控制器。
1.BASE
BASE选择脉冲轴接入的轴号,接在DB头上轴编号即为面板上标识的AXIS编号。
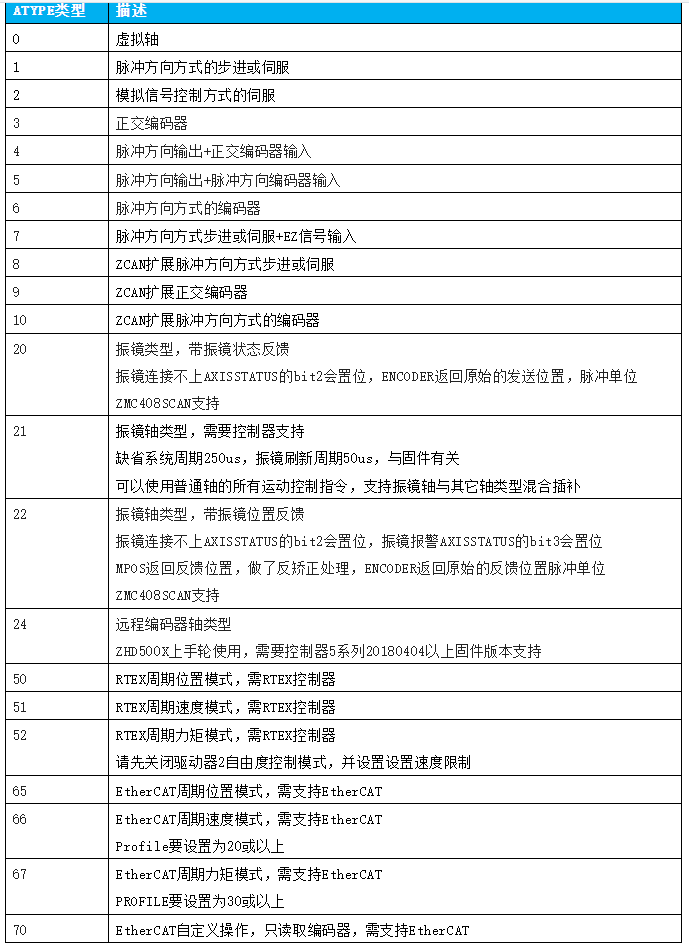
2.ATYPE
ATYPE设置轴的类型,不带反馈的脉冲轴ATYPE=1/7,带编码器反馈的ATYPE=4/5,编码器单独接入设置ATYPE=3/6。
3.UNITS
UNITS设置脉冲当量,根据驱动器的一圈脉冲数配置,作为控制器的基本单位,可设为电机转动1°需要的脉冲数,驱动器若10000个脉冲转一圈,可设置为UNITS=10000/360。
换算关系:若UNITS=10000,直线命令MOVE(5)表示下发50000个脉冲;运行速度SPEED=10,表示每秒下发100000个脉冲。
4.速度
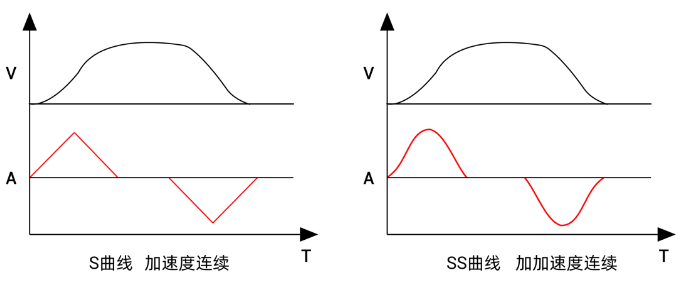
SPEED运行速度、ACCEL加速度、DECEL减速度等基础速度参数的设置;SRAMP指令设置S曲线,延长加速的时间,速度变化更为平缓,减少抖动,VP_MODE指令设置SS曲线,加速度平稳过渡,使轨迹更柔顺,冲击更小。
5.确认脉冲模式
控制器出厂默认的脉冲模式是脉冲+方向,脉冲模式需要匹配才能运行,需确认驱动器的脉冲模式。
控制器支持三种脉冲模式,脉冲+方向,双脉冲和正交脉冲(4系列及以上支持)三种,正/负逻辑均可配置。
脉冲模式修改使用INVERT_STEP指令,初始值INVERT_STEP=0,脉冲+方向模式。
语法INVERT_STEP = mode
mode:模式选择,缺省0,低8位(位0-位7)表示的模式值如下:
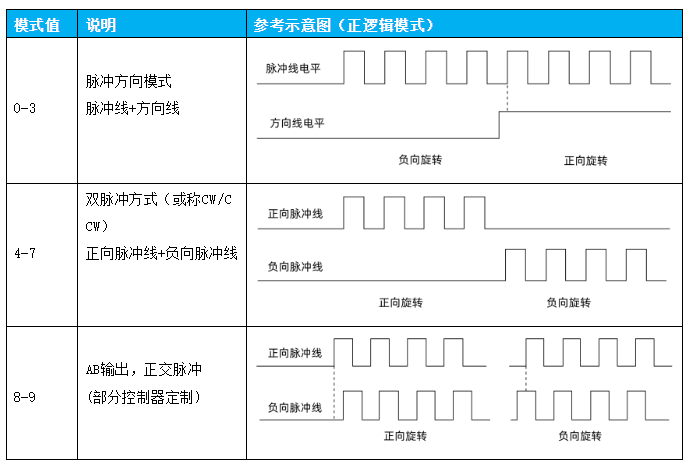
各个模式对应的电平如下:若极性对调,参考运动方向与原来相反。
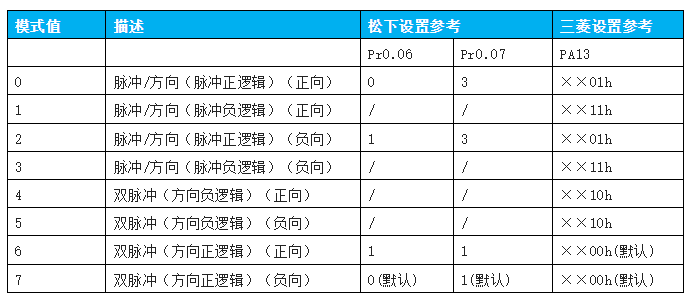
高8位(位8-位15)表示方向变化保护时间,单位微秒:0-255
设置方法:INVERT_STEP(轴号) = 256*100+6,双脉冲模式6,保护时间100微秒。
6.运动
采用视图菜单的手动运动窗口或在线命令发送MOVE直线运动指令调试,通过DPOS目标位置(或MPOS反馈位置)等获取轴的运动情况,也可采用ZDevelop软件的视图窗口“示波器”实时采样运动波形。电机运动方向与电机极性设置和INVERT_STEP正/负逻辑设置有关。
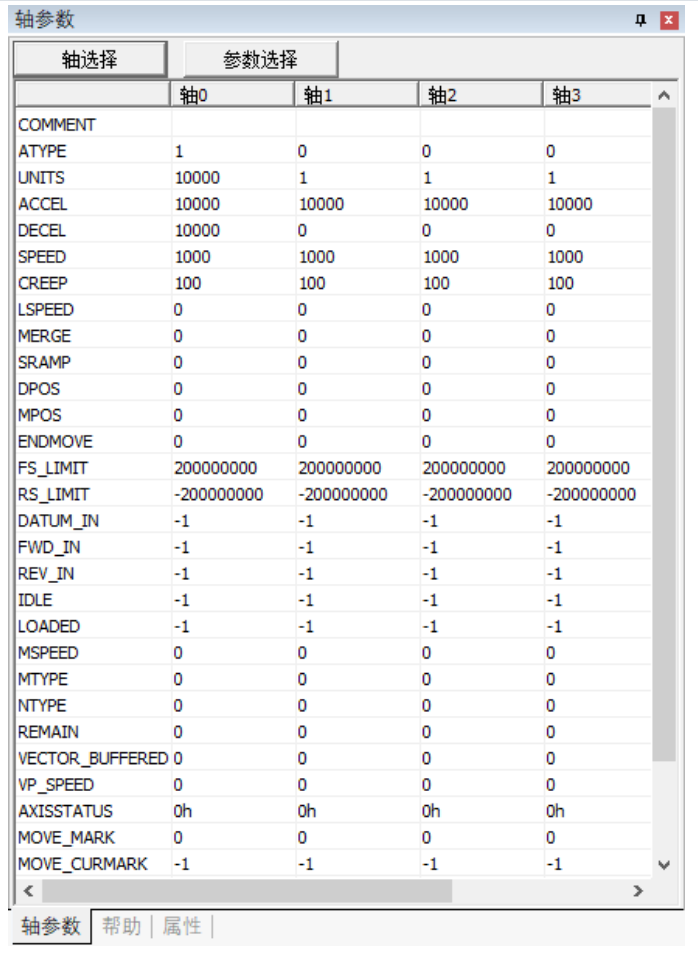
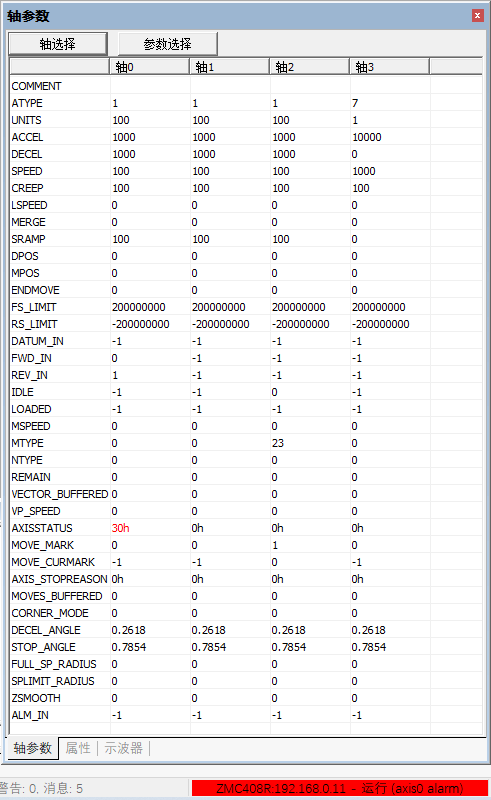
7.参数查看
轴参数配置完成可再“轴参数”窗口查看,实时自动刷新和显示轴参数,支持双击直接修改配置参数。
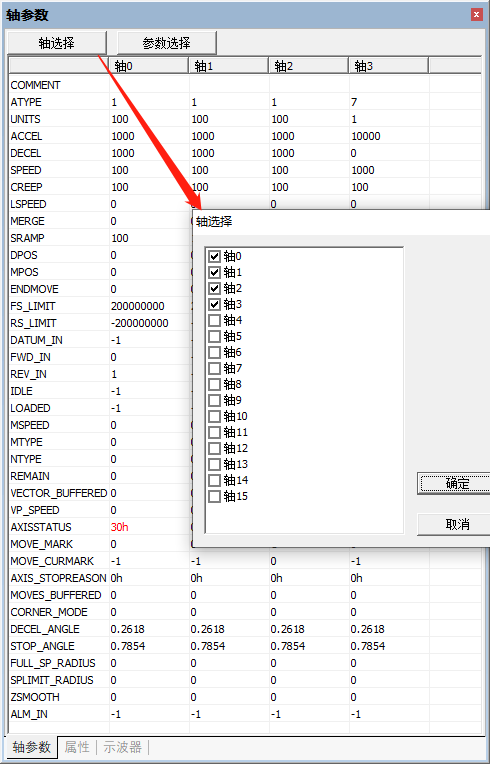
轴选择:用于选择要显示的轴号信息。
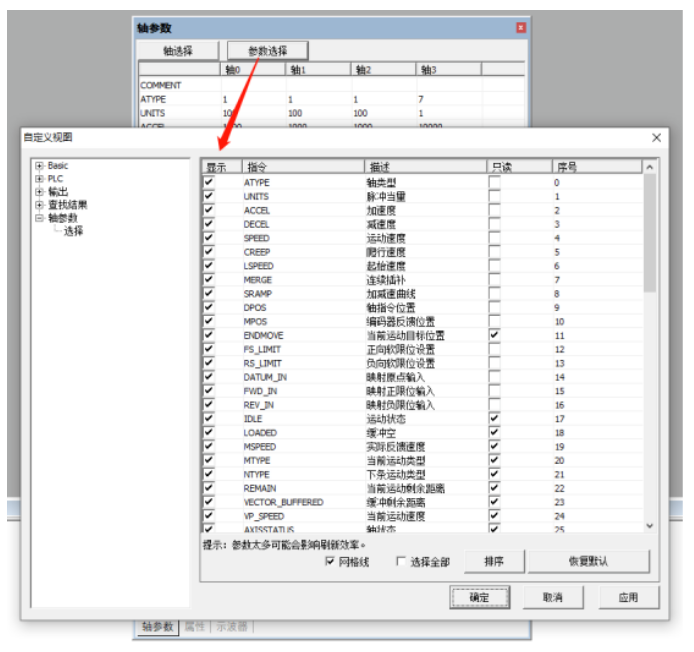
参数选择:用于自定义显示关注的轴参数。
8.异常报警
发生异常报警ZDevelop软件的“命令与输出”窗口打印错误信息提示,或产生AXISSTATUS报警提示。
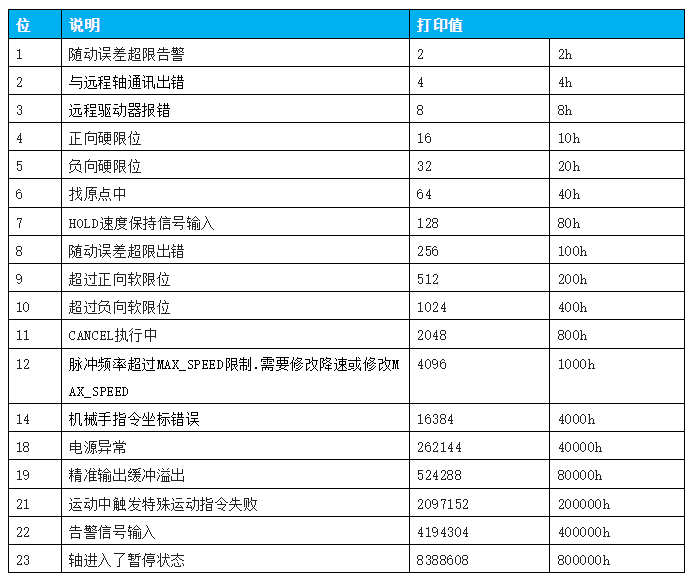
AXISSTATUS为轴状态参数,用于判断轴当前是否发生异常,按位提示异常信息,可多种异常信息叠加,查询下表确认,例如AXISSTATUS显示20h,表示当前碰到负向硬限位,会导致轴立即停止。
AXISSTATUS显示1000h,表示下发脉冲频率太快,一般只有在高分辨率的设备会产生此类问题,出现此报警将MAX_SPEED改大即可解决。
试运行前要确保硬限位开关配置成功,作为机台的安全保护,防止过冲。
机台确认可以动作之后,通过DATUM指令配置回零模式,DATUM_IN指令配置原点传感器映射到输入口,回零说明参见历史文章。
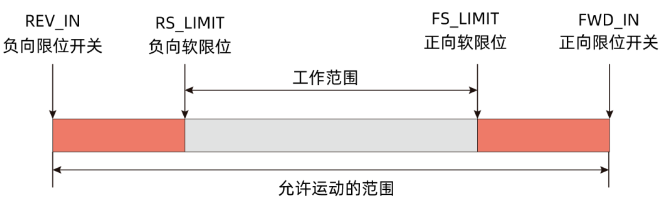
硬限位开关是限制轴的最大“允许行进范围”的限位开关。硬限位开关是安装在轴运动行程上的物理开关元件,一般是一个传感器,硬限位开关由指令映射到相应输入开关信号上,根据开关信号是常开还是常闭确定是否要对信号进行翻转,设置完成后,碰到硬限位开关,对应轴立即停止运动,停止减速度为FASTDEC。软限位开关将限制轴的“工作范围”,由指令直接设置限位位置,轴走到设置的DPOS坐标位置后,立即采用减速度FASTDEC停止运动,根据实际需求配置软限位。
9.配置语法
FWD_IN = 正向硬限位接入的输入口编号,-1取消映射;
REV_IN = 负向硬限位接入的输入口编号,-1取消映射;
FS_LIMIT = 正向运动行程限制,取消设置较大值;
RS_LIMIT = 负向运动行程限制,取消设置较大值。
例如,ZDevelop软件下方状态栏提示axis0 alarm提示红色的报警错误,检查轴参数中轴0的AXISSTATUS参数,提示30h,对照AXISSTATUS指令说明,得知发生的是正负限位报警,查看限位配置,即FWD_IN(0)=0,REV_IN(0)=1对应的IN0,IN1的配置,以及其相关的输入是否INVERT_IN反转了电平状态。
四、手动运动快速调试
关闭所有除ZDevelop的软件,同时使用ZDevelop连接控制器,下载空程序,按前面说明手动设置选择要调试的轴号、设置轴类型ATYPE、脉冲当量UNITS、加速度ACCEL、减速度DECEL、速度SPEED,然后打开“视图”-“手动运动”,手动操作电机试运行。

操作方法:按住“左”/“右”不放,电机持续运动,松开停止。“指令位置”显示当前发出的脉冲DPOS(单位为UNITS)。填写“距离”参数,点击“运动”,勾选“绝对”时,电机运动到距离参数位置;不勾选“绝对”时,电机按距离参数继续运动。
按照以上步骤设置之后,如果电机无法运动,参考下节说明排查。
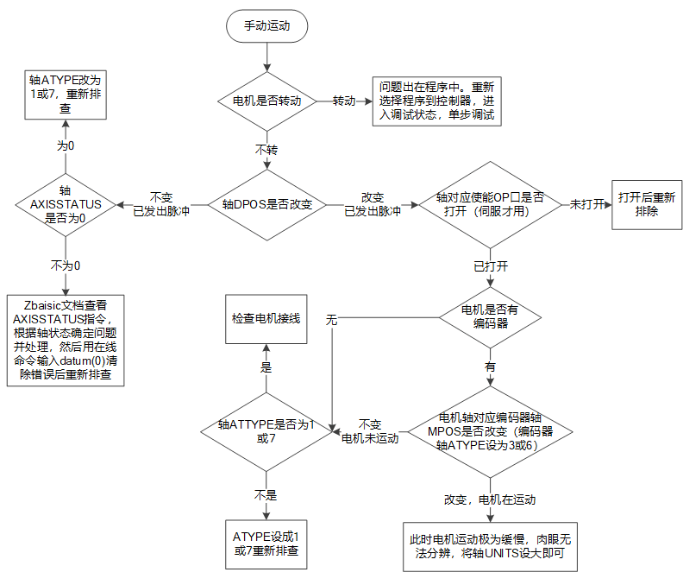
02电机不动作问题排查
一、脉冲轴排查步骤
二、报错提示
驱动器有无报警提示,若产生报警,根据报警错误码核对驱动器手册说明解决后重新运行。
控制器端是否产生报警信息,根据ZDevelop报警打印的错误信息、错误码或AXISSTATUS轴状态提示,解除错误后重新运行。
三、参数设置不当
检查下列参数是否设置合理:
1.电机是否使能成功,电机轴无法用手拨动即为成功使能;
2.下发运动的轴号一定要选择正确,否则运动命令无法下发给该驱动器;
3.轴的类型根据ATYPE指令的表格填写正确类型,类型错误控制器会报错,导致无法运动;
4.UNITS的值设置合理,脉冲下发速度太小导致电机动作微弱,肉眼无法分辨是否运动;
5.下发运动指令后,轴参数窗口该轴的DPOS是否改变,未变表示脉冲并未发出,排查AXISSTATUS轴状态有无提示,当前轴接口是否损坏。
四、动作不正确
1.电机只能单向运动,可能原因有:
(1)电机处于限位状态,查看AXISSTATUS确认;
(2)电机控制模式不对,INVERT_STEP设置为相应的脉冲模式(双脉冲或脉冲+方向);
(3)电机接线问题,确认接线。
2.DPOS和MPOS极性相反,或电机转向与预期相反,解决办法:
修改电机的极性,通过INVERT_STEP指令或驱动器软件修改。
接线错误时注意事项:
⊙检查脉冲接线和供电线路是否正确。
⊙检查各模块是否正确上电。
⊙检查单端接线时确认IO是否上电成功。
本次,正运动技术EtherCAT运动控制器中脉冲接口的快速调试与诊断,就分享到这里。
审核编辑黄宇
-
驱动器
+关注
关注
51文章
7310浏览量
142970 -
接口
+关注
关注
33文章
7640浏览量
148496 -
运动控制器
+关注
关注
2文章
343浏览量
24360 -
电机
+关注
关注
139文章
8313浏览量
142109
发布评论请先 登录
相关推荐
正运动技术运动控制器EtherCAT总线快速入门
经济型EtherCAT运动控制器:EtherCAT总线快速入门
【正运动】全国产EtherCAT运动控制器 | ZMC432H
EtherCAT运动控制器进行自定义API封装例程
EtherCAT总线运动控制的优势主要体现在哪?
激光振镜运动控制器(一):ZMC408SCAN接口与功能
EtherCAT运动控制器中脉冲接口的快速调试与诊断
EtherCAT运动控制边缘控制器ZMC432H的轴参数配置和单轴运动控制

全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发

凌华科技基于软件控制的EtherCAT运动控制器






 工商网监
工商网监
评论