 磁驱动自降解微型机器人用于前列腺癌治疗
磁驱动自降解微型机器人用于前列腺癌治疗

前列腺癌是男性最常见的肿瘤疾病,其治疗在标准肿瘤治疗中仍然是一大挑战。磁驱动微型机器人在现代纳米医学中,具有无线引导、有效细胞穿透和非侵入性驱动的优势。
近期,来自捷克布尔诺理工大学(Brno University of Technology)的Martin Pumera团队报道了用于原位治疗前列腺癌的新型可生物降解磁驱动含锌与胱氨酸微型机器人。
在该研究中,微型机器人是基于可生物降解的胱氨酸微粒,通过简单的锌介导的自组装方法获得。同时,铁磁性能由Fe₃O₄纳米颗粒(NPs)引入,从而允许可控的磁导航。
胱氨酸微型机器人可以在肿瘤细胞附近递送并自然吸收,细胞内还原环境可引起胱氨酸二硫键的断裂,自发生物降解。因此,Zn²⁺作为治疗前列腺癌(PC)的必需金属离子,可以在细胞内释放,促进癌细胞的杀伤(方案1)。
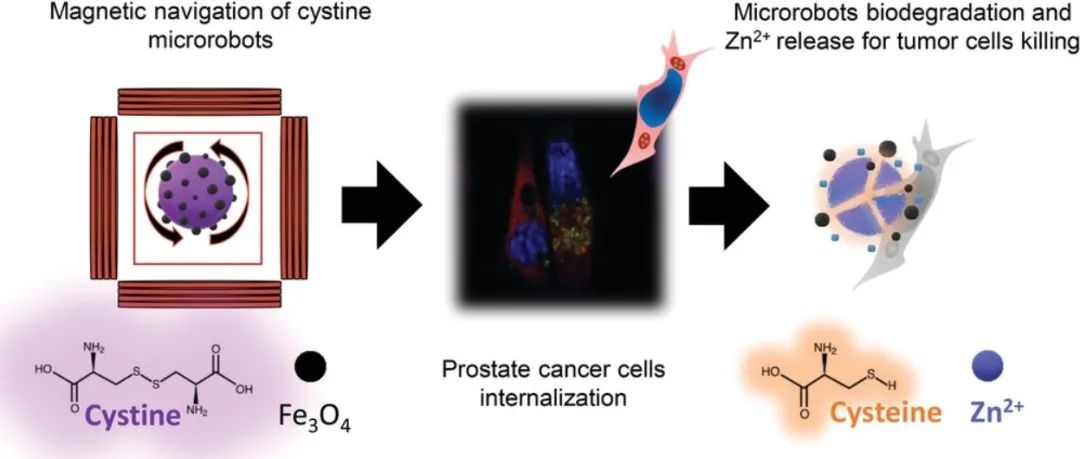
方案1磁驱动胱氨酸微型机器人被递送到前列腺癌(PC)细胞附近并被细胞吸收,细胞内还原环境通过破坏二硫键和非共价分子间相互作用对微型机器人进行生物降解,导致Zn²⁺的释放,从而促进肿瘤细胞的杀伤
图1报告了制备胱氨酸微粒和相应的胱氨酸微型机器人的方案,以及扫描电子显微镜(SEM)图像和能量色散X射线光谱(EDX)图像,可以观察到胱氨酸微型机器人具有更高的表面粗糙度和较低的致密结构(图1a)。
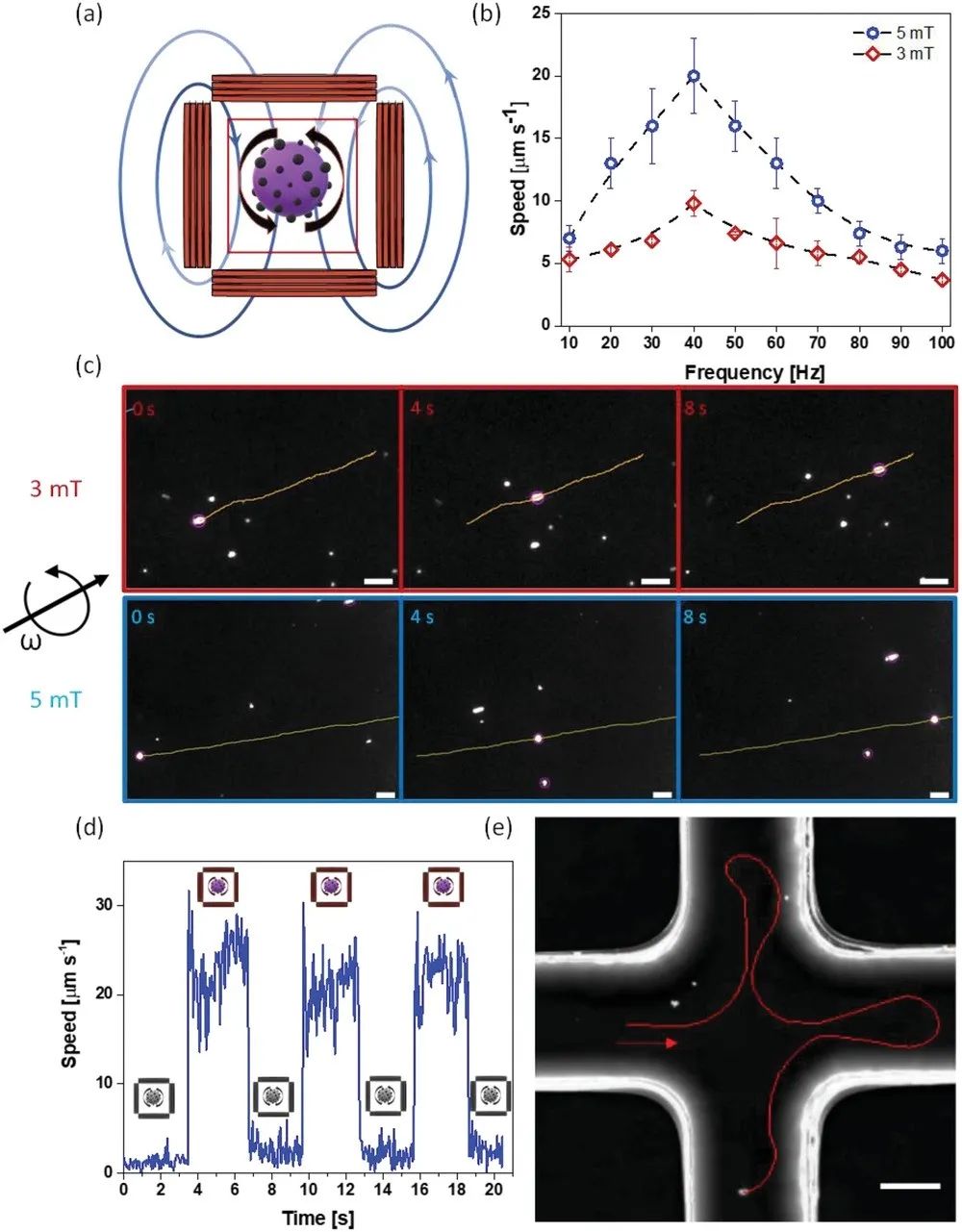
图1胱氨酸微粒及磁性胱氨酸微型机器人的制备与形态分析
研究人员使用旋转磁场来操纵微型机器人,图2a显示了磁性设置的示意图,图2b报告了微型机器人的速度与施加磁场的频率和强度之间的关系。图2c显示了捕获的延时光学显微镜图像,证实了施加的磁场强度与胱氨酸微型机器人的位移之间的相关性。通过打开或关闭磁场来研究精准控制(图 2d),在没有磁场的情况下,微型机器人仅呈现布朗运动,而当打开磁场时产生即时响应。此外,微型机器人通过预定义的路径导航到微流体通道,显示远程良好控制的导航性(图2e)。
图2磁驱动胱氨酸微型机器人运动分析
胱氨酸在细胞中会迅速转化为半胱氨酸。为了证明胱氨酸微型机器人的有效酶还原,使用还原烟酰胺腺嘌呤二核苷酸(NADH)为模型来探索其生物降解。图3a报告了胱氨酸的NADH还原,从图3b中报告的紫外-可见光谱中的吸收峰强度变化,证实了反应的发生。
当使用动态光散射(DLS)确定胱氨酸微型机器人的尺寸分布(图3c),发现胱氨酸微型机器人逐渐自我降解。微型机器人具有出色的尺寸稳定性(图3d)。当用纯水处理时(图3e),它们表现出高度的聚集。综上所述,胱氨酸微型机器人在模拟生物环境中表现出良好的稳定性。
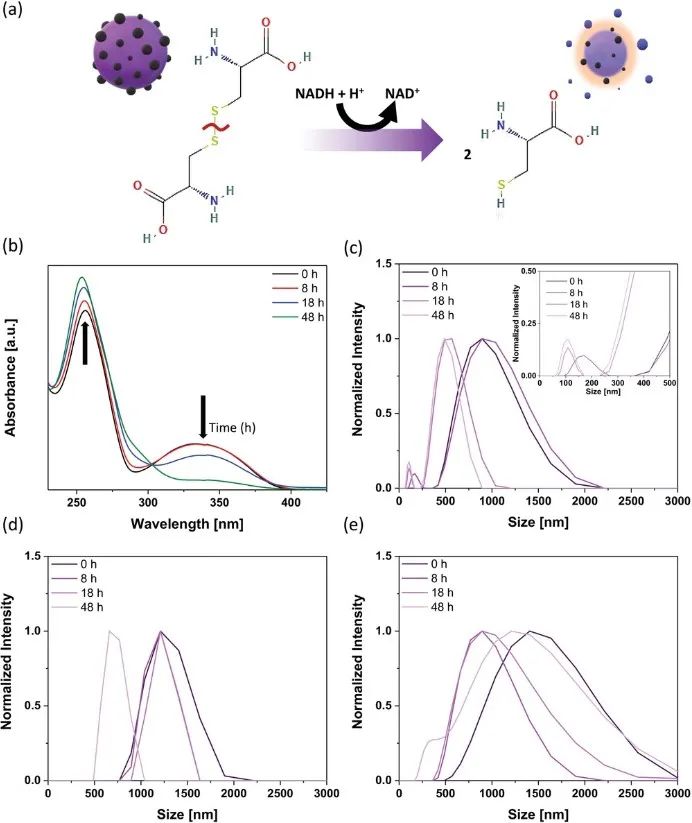
图3胱氨酸微型机器人酶转化
图4报告了PC-3细胞的微分干涉对比(DIC)和荧光显微镜图像,以验证胱氨酸微型机器人的内化。图4a中的图像表明胱氨酸微型机器人在细胞中内化。图4b中报告的Z-stacks图像正交投影的构建通过观察微型机器人定位后的荧光图像的重叠来进一步支持定位。
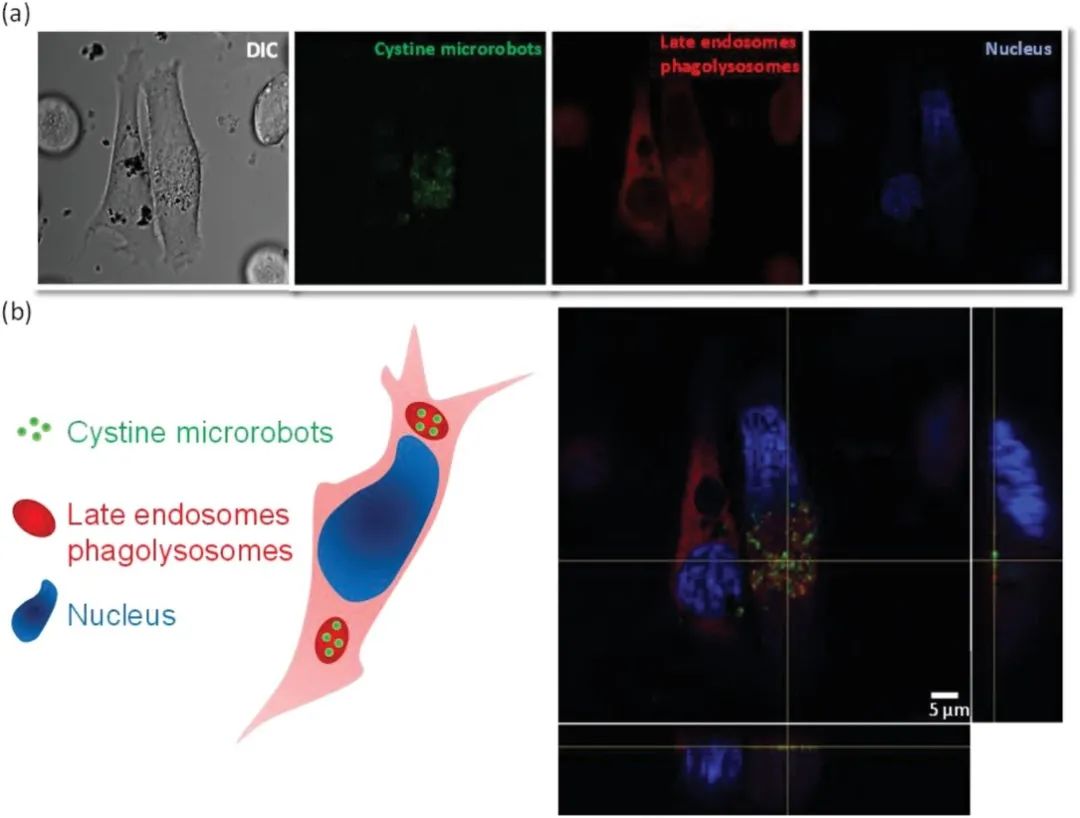
图4PC-3细胞对胱氨酸微型机器人摄取的评估
用胱氨酸微型机器人和胱氨酸微粒孵育PC-3细胞后,通过实时监测细胞增殖和死亡,研究细胞毒性作用。用胱氨酸微型机器人处理细胞的活力百分比(图5a),随着使用浓度增加而降低,并且产生半细胞生长抑制的浓度低于胱氨酸微粒(图5b)。
通过实时成像(图5c),在存在胱氨酸微型机器人的情况下显示出更高的细胞增殖减少。因此,胱氨酸微型机器人显示出比胱氨酸微粒更高的细胞毒性。可能是添加Fe₃O₄ NPs后微粒形态的急剧变化(图5d),有利于Zn²⁺的释放。
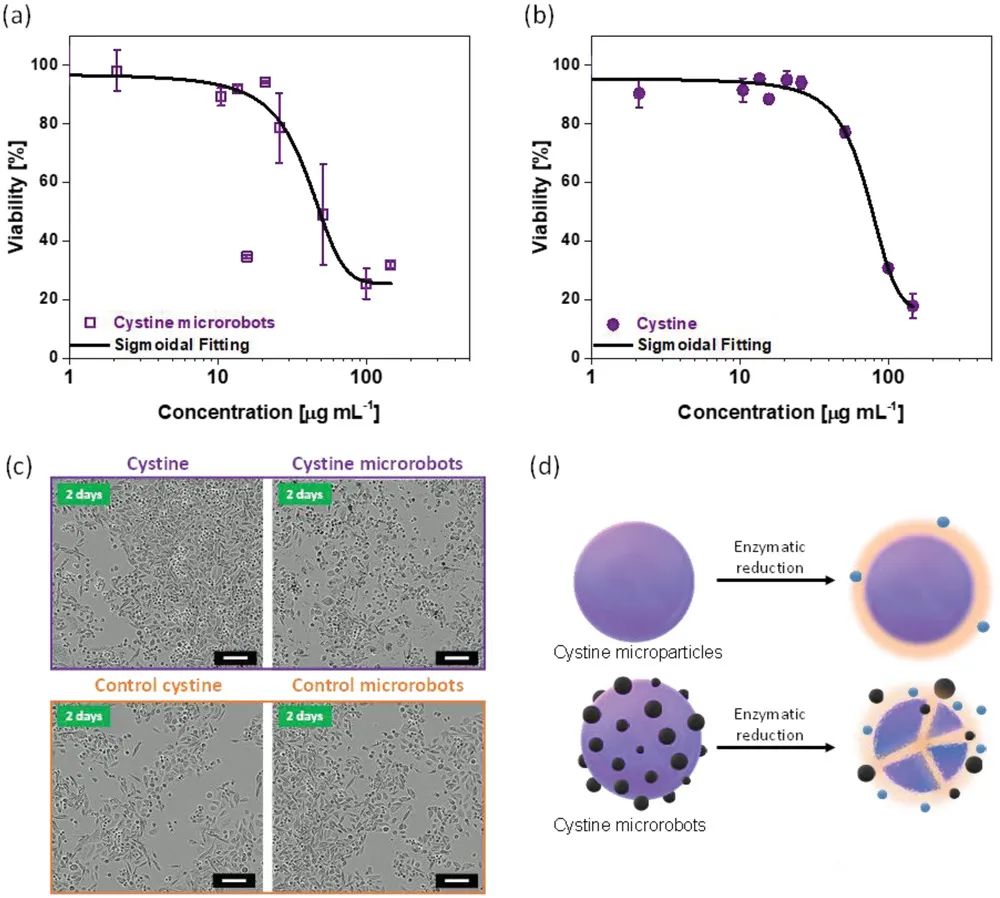
图5胱氨酸微型机器人对活PC-3细胞的细胞毒性作用
本文介绍的处理PC细胞的有效策略是基于氨基酸胱氨酸的新型自降解磁驱动微型机器人,并可以通过锌介导的自组装方法制造,表征结果证实了这种新型微型机器人,可以通过内化方式以非侵入性方法杀死肿瘤细胞,在将来有望用于PC治疗。
审核编辑:刘清
-
机器人
+关注
关注
214文章
31700浏览量
224681 -
SEM
+关注
关注
0文章
275浏览量
15745 -
永磁驱动器
+关注
关注
0文章
3浏览量
1289 -
DLSS
+关注
关注
0文章
26浏览量
3857
原文标题:磁驱动自降解微型机器人,用于前列腺癌治疗
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
起源于诺贝尔物理学奖得主,纳米机器人再突破!
人形机器人关节扭矩传感器的详细应用场景及解决方案
小型自重构机器人能不能帮忙做一个?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
智能机器人的“神经网络”:线圈在驱动与感知中的核心作用
绳子驱动的机器人,会是未来吗?

中国科学院研发3D手型微纳机器人
深度解读人形机器人电感产品需求及应用选型技巧
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
集成MT6701磁编芯片的机器人关节模块化设计与驱动优化




评论