 如何实现双轮差速底盘躲避悬崖的功能?
如何实现双轮差速底盘躲避悬崖的功能?

1. 功能说明
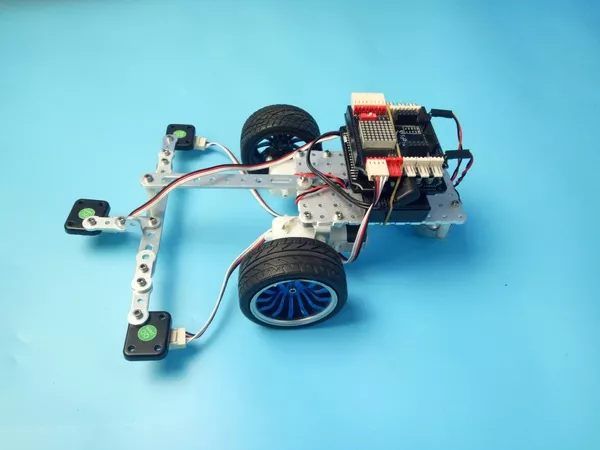
本实验使用的样机为R023样机小型双轮差速底盘。在样机前方安装3个近红外传感器 ,实现机器人躲避悬崖、在某平台上移动时不会掉下去的效果。
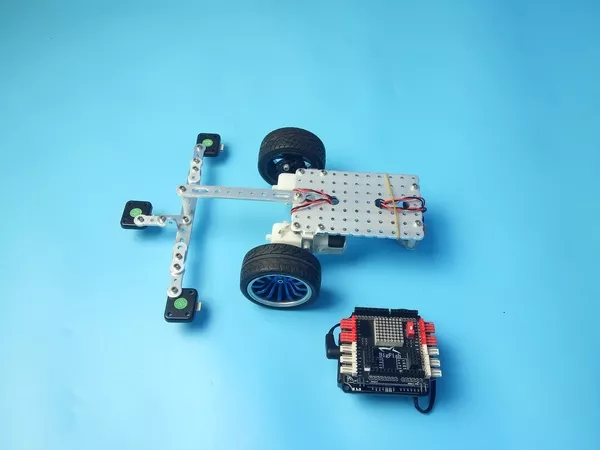
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1 |
| 传感器 | 近红外传感器 |
| 电池 | 7.4V锂电池 |
左轮直流电机连在D9,D10接口上;右轮直流电机连在D5,D6接口上;3个近红外传感器从左到右分别连在A0、A4、A3接口上。
3. 示例程序
编程环境:Arduino 1.8.19
编写并烧录以下程序(nine.ino),该程序将实现演示视频中的动作【完整资料请参考https://www.robotway.com/h-col-113.html】
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2023-02-10 https://www.robotway.com/ ------------------------------------------------------------------------------------*/ void Right(); void Left(); void Stop(); void Forward(); void Back(); void setup() { pinMode( 17, INPUT); pinMode( 18, INPUT); pinMode( 14, INPUT); pinMode( 10, OUTPUT); pinMode( 6, OUTPUT); pinMode( 5, OUTPUT); pinMode( 9, OUTPUT); } void loop() { if (((!( digitalRead(14)) && ! (digitalRead(17)) ) )) { Forward(); } if (( digitalRead(14) )) { Left(); delay( 300 ); } if (( digitalRead(17) )) { Right(); delay( 300 ); } if (( digitalRead(18) )) { Back(); delay( 1000 ); analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 100); delay( 1500 ); } } void Right() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Forward() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Back() { analogWrite(5 , 0); analogWrite(6 , 100); analogWrite(9 , 0); analogWrite(10 , 100); } void Left() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); } void Stop() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); }
4. 扩展
本实验采用3个近红外传感器,利用的是近红外传感器能够识别到距离较近的桌面,无法识别到距离较远的地面,因此桌面要距离地面远一些。
本实验还可以使用灰度传感器或者白标传感器。利用的是灰度和白标在悬崖处极难收到反射回来的红外线的原理,因此相应的桌面必须是浅色,如果桌面也是深色,灰度和白标传感器就无法区分桌面和悬崖了。
审核编辑黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55516浏览量
793987 -
机器人
+关注
关注
213文章
31455浏览量
223680 -
编程
+关注
关注
90文章
3723浏览量
97440
发布评论请先 登录
相关推荐
热点推荐
探索Qorivva MPC567xK:汽车安全与底盘控制的理想之选
。Qorivva MPC567xK系列MCU凭借其卓越的性能和丰富的功能,成为汽车安全和底盘控制应用的理想解决方案。 文件下载: SPC5675KFF0MMM2.pdf 一、产品概述 MPC5675K是一款
格陆博科技携手行业专家加速突破线控底盘核心技术
当前,智能汽车产业正处于技术变革的关键时期,线控底盘作为实现高阶自动驾驶的核心载体,正迎来前所未有的发展机遇。
速腾聚创:一季度激光雷达产品销量飙升204.1% 机器人业务占比首超车载
万台,同比增长204.1%,其中机器人业务销量占比达56.2%,并首次超过车载激光雷达业务,成为公司第一大增长动力。 速腾聚创表示,这标志着公司“ADAS+机器人”双轮驱动战略取得结构性突破,2026年实现业务收入均衡贡献的

高压差分探头“限制带宽”功能解析
Limit(限制带宽)”这个功能的真正价值——尤其是在高压浮地、强干扰的工业场景中,它往往能帮你避开测量误区,拿到更真实的波形数据。 今天就来好好聊聊,高压差分探头的限制带宽功能,到底是什么、有什么用,以及什么时候该用、什么时

熠速荣获DEKRA德凯ISO 26262 ASIL-D认证
近日,上海熠速信息技术有限公司(以下简称“熠速”)自主研发的PolarTest自动化测试软件工具,成功通过国际权威机构DEKRA德凯的严格评估,荣获ISO 26262 ASIL-D级别功能安全产品
格陆博科技荣登2025创业邦100未来独角兽榜单
2026年1月15日,在创业邦年度颁奖盛典上,格陆博科技凭借其在智能底盘领域的创新实力与市场表现,成功入选“创业邦100未来独角兽”榜单。公司以“成熟主力业务+前沿创新产品”的双轮战略,持续领跑智能底盘赛道,为智能出行提供坚实可
智能底盘电机驱动应用方案
智能底盘技术是汽车电气化和智能化技术革命的产物。它不仅提高了车辆的整体效率,还提高了车辆的安全性。类比半导体公司为智能底盘系统提供一系列高性能电机驱动器和传感器接口芯片。这些芯片以其出色的控制精度和稳定性,支持自动驾驶功能和先进
格陆博科技亮相盖世汽车2025底盘大会
11月19日,盖世汽车举办的底盘大会隆重召开,本届大会紧扣「智创底盘 擎动未来」主线,聚焦线控转向冗余安全架构、底盘与智驾域深度融合、EMB规模化落地、智能悬架AI协同控制、线控转向与智能辅助驾驶协同等热点议题,携手智能
速通音频处理:掌握TTS播放、文件播放与录音核心,实现完整功能
播放TTS、播放音频文件及录音是构建完整音频处理功能的三大核心模块。若想快速掌握并实现完整音频处理能力,无需深挖底层细节,只需聚焦“资源加载、播放控制、状态同步与异常处理”四大关键环节——本文将拆解
破解智能底盘测试4大难题:imc提供一体化解决方案
底盘技术发展趋势Part.1智能化是汽车行业未来发展的必然趋势,底盘智能化是其核心之一。各种线控底盘技术持续进步,并不断与自动驾驶技术相结合,丰富车辆的功能、提升其性能。在此浪潮下,

帝奥微推出功能安全ASIL-B车规级霍尔轮速传感器DIA9701
控制系统(TCS)、电动转向助力系统(EPS)、车辆动态控制系统(VDC)、间接胎压监测系统(ITPMS)、自动变速器控制系统等。帝奥微推出全新车规级带有功能安全ASILB等级的振动抑制型霍尔轮速传感器DIA9701系列,为轮速

双电机后轮驱动混合动力汽车电子差速控制的研究
[摘要]针对双电机后轮驱动混合动力汽车电子差速的控制问题,考虑车辆转向时轴荷转移、向心力和轮胎侧偏角的影响,以车轮的滑移率为控制目标,提出了基于门限值控制的电子差速控制策略,并在 Ma
发表于 06-18 16:39
扫描电机的PID恒速控制仿真及实验
数学模型,并通过 Matlab Simulink 搭建了仿真模型。提出了使用增量式PID控制算法实现电机的恒速控制,并进行了仿真,最后,利用STC89C52将PID控制与BIDCM结合在一起,通过实验
发表于 06-16 21:53
Allegro Skill布线功能-添加差分过孔禁布区
它还能优化差分信号的回流路径,降低过孔寄生效应,减少信号反射和阻抗不连续性。通过这些措施,差分信号的传输质量得以提升,从而满足高速信号传输的要求。 那么可以通过FanySkill中“布线功能-添加
发表于 05-28 15:19
•1173次阅读




评论