 DIYRaspberry Pi无人机第二部分–Naza-M Lite指南
DIYRaspberry Pi无人机第二部分–Naza-M Lite指南

这篇文章来源于DevicePlus.com英语网站的翻译稿。
在之前的文章《DIYRaspberry Pi无人机:机械构造–第1部分》 和 《DIYRaspberry Pi无人机:机械构造–第1部分(续)》,我们介绍了系统中的单个硬件,并组装完成了四轴飞行器。在第二部分中,我们将介绍该四轴飞行器的软件部分。我们将配置发射器和接收器并连接到NAZA。
通过该项目,我们可以利用一些现成的组件组装一台能够拍摄高质量航拍照片以及稳定高清视频的四轴飞行器。该飞行器还会配备多种安全功能,所以新手也可以自信地操作该四轴飞行器。四轴飞行器的实时视频流通过Wifi从Raspberry Pi传输到移动设备上。该无人机还搭载了一个Linux计算机,这会为我您来许多创造性—额外的传感器,计算机视觉等。
硬件
第一部分组装的四轴飞行器:
DJI F450 ARF (几乎到手即飞) 套件
3300mAh 3S 35C LiPo 电池(附带T型接头)
EV-Peak – AP606 – 50W DC LiPo 电池充电器/放电器 (大多数LiPo充电器都适用)
RadioLink AT9 2.4GHz 9CH 发射器,R9D 9CH接收器
Xiaomi Yi 运动相机(附带microSD卡)
FeiYu Tech Mini 3D 3轴无刷万向节
Raspberry Pi (Model A+), microSD 卡
Raspberry Pi 相机模块
任意支持802.11a/n/ac(5GHz频段)的USB无线网卡——本项目用的是D-Link DWA-160
各种公母T型接头
RadioLink AT9 2.4GHz 9CH 发射器,R9D 9CH接收器
吸盘式车载手机支架
4个M3螺栓,8个M3螺母
MicroB USB 数据线
软件
Naza-M Lite Assistant (点击此处下载)
发射器和接收器配置
第1步:配置模式类型
发射器第一次开机时,您将会看到一个与下图非常相似的菜单。此菜单包含几个很有用的指示标志:右上方是发射器的电池电压;电池电压正下方是四轴飞行器的飞行模式;电池电压的左侧是发射机与接收机之间的信号强度;T1和T2是可以通过开关激活的计时器。
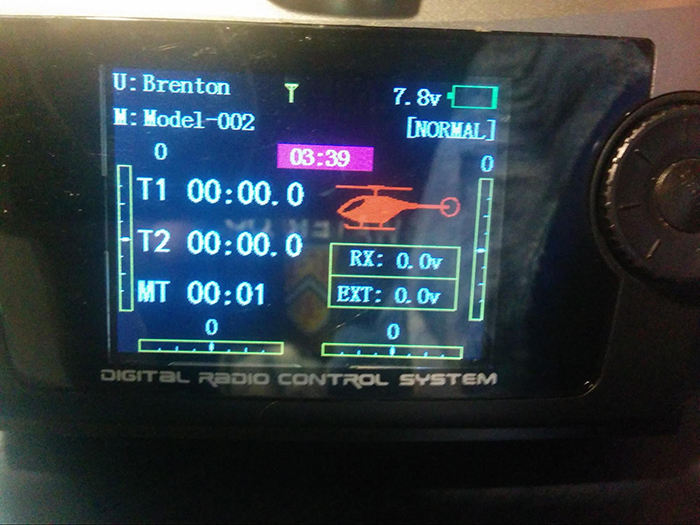
图1.发射器主屏幕
要访问配置菜单我们需要配置发射器,只需要简单地按下Mode按钮。用屏幕右侧的滚轮选择MODEL TYPE选项,然后通过按下滚轮进入菜单。(现在开始,我将定义这个操作为按下回车键)。
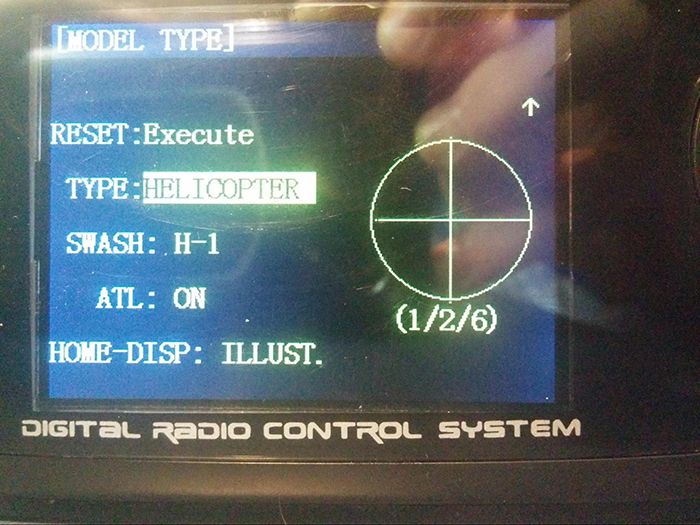
图2.模式配置菜单
如您所见,我们的发射器默认配置为“HELICOPTER”,为了让我们的发射器为四轴飞行器工作,我们必须将模式改成“AIRCRAFT”。为此,先选择“TYPE”,然后按下中间按钮,滚动选择到“AIRCRAFT”,按下回车键保存您的选项。
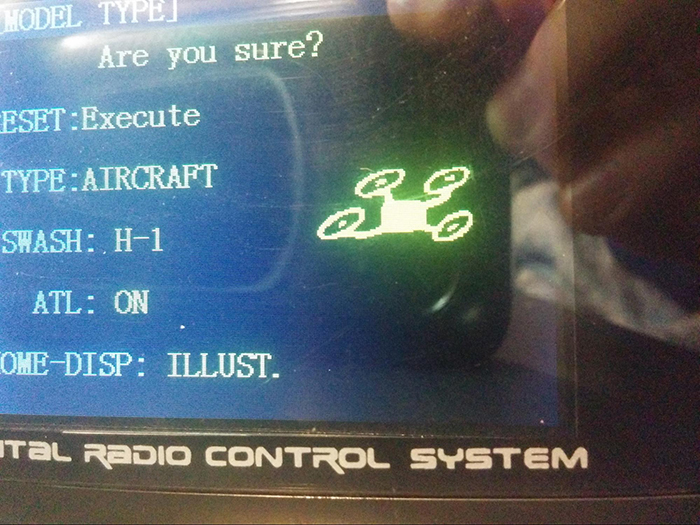
图3.调整模式类型后的模式配置菜单
将模式类型设置为AIRCRAFT后,您将看到如图3所示的四轴飞行器图标。接下来让我们配置端点值!
第2步:配置通道端点值
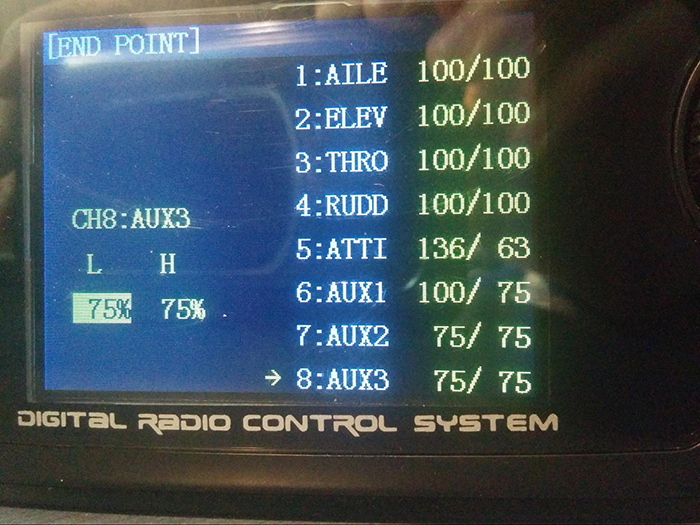
图4.通道端点菜单
进入END POINT菜单。前四个通道保持不变。但是,我们需要更改通道5和通道6的端点值。使用滚轮选择第五个通道,然后按回车键,并调整通道的低点(L)和高点(H),使其与上图匹配。
第3步:配置通道反向
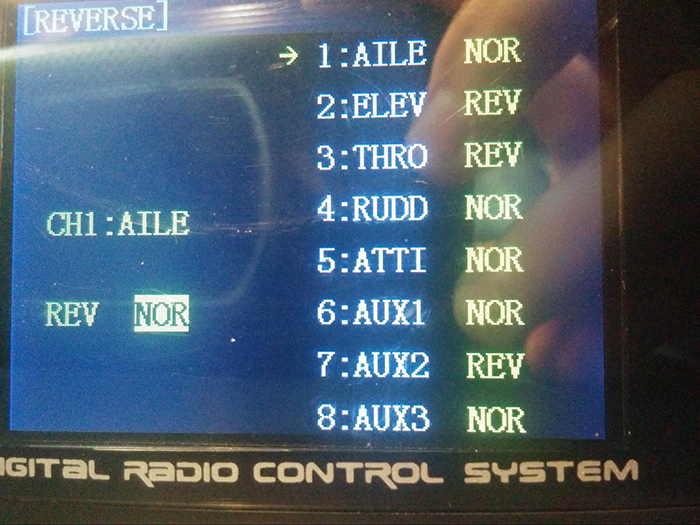
图5.通道反向菜单
发射器的“ELEVATOR”通道和”THROTTLE”通道默认反向,为了纠正这个问题,我们进入“REVERSE”菜单并且反转”ELEV”通道和“THRO”通道。选择相应通道,按下回车键,使用滚轮将NOR更改为REV。
第4步:配置辅助通道
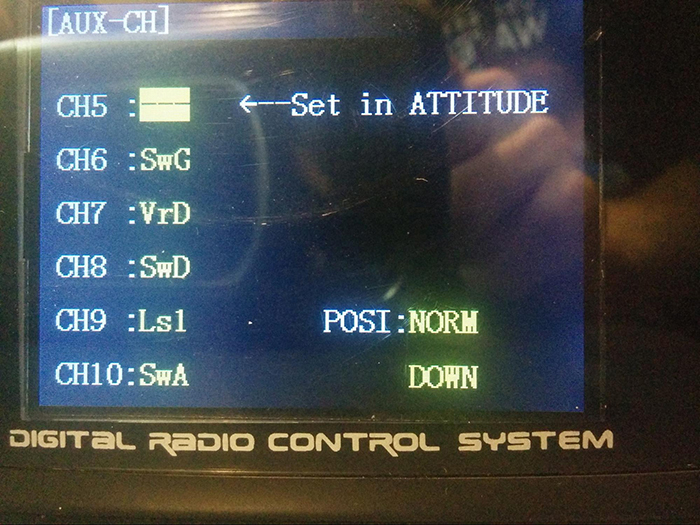
图6.辅助通道菜单
要将三向开关链接到飞行模式和方向锁定通道,请进入AUX-CH菜单。在此页面上,只需将CH6开关设置为SwG即可。
第5步:配置故障保护模式
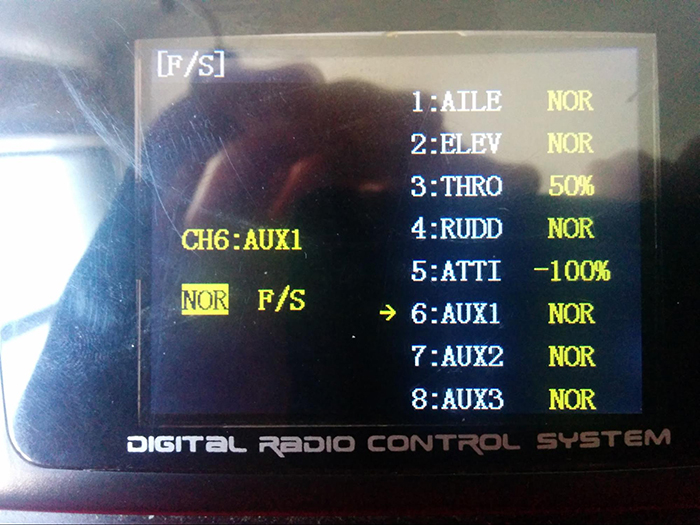
图7.故障保护配置菜单
如果发射器与接收器的连接中断,我们希望四轴飞行器能自动进入故障保护模式。为此,请进入F/S菜单,按照上图设置故障保护通道的数值。实际上,我们将“AILERON”、“ELEVATOR”、“RUDDER”设为默认值,将“THROTTLE”设为50%(悬停),将飞行模式切换至故障安全模式。
第6步:下载并安装NAZA-M Lite Assistant
要配置NAZA-M Lite,我们需要在Windows电脑上安装NAZA-M LiteAssistant。您 可以点击此处下载。请按照屏幕上的说明进行安装。
第7步:配置并连接到NAZA
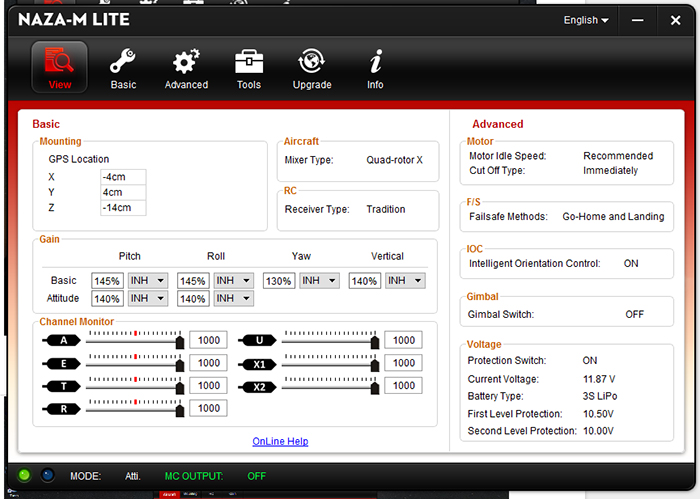
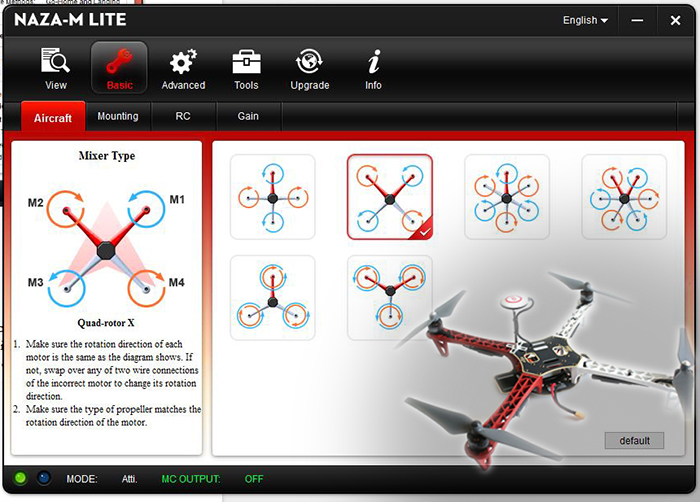
图8.DJI NAZA-M Lite Assistant主页
NAZA-M Lite的飞行模式有多种。我们来看一下3种控制模式。
控制模式 – DJI Wiki
GPS姿态模式(GPS Attitude Mode):与GPS巡航模式相同。唯一的区别是该模式控制的是直升机姿态。操纵杆的中心位置为0°姿态,端点为45°,这是一个固定限制。GPS姿态模式可用于大型飞行运动,能为您带来出色的新型飞行体验。
对于Ace系列、WooKong-H系列和Naza-M系列,端点是45°。
对于WooKong-M系列,端点是35°。
姿态模式(Attitude Mode):适用于无GPS信号或GPS信号弱的环境。Ace One可以精确地控制姿态稳定性并准确锁定飞行高度;操纵杆的中心位置为0°姿态,端点为45°,这是一个固定限制。姿态模式可用于大型飞行运动。
对于Ace系列、WooKong-H系列和Naza-M系列,端点是45°。
对于WooKong-M系列,端点是35°。
手动模式(Manual Mode):就是直接进行机械驱动。除无平衡翼功能外,系统的自动驾驶仪不能保持飞机平稳。所以手动模式适合经验丰富的操作人员。
故障保护功能启用后,四轴飞行器不再响应您的输入命令,并自动返回其起飞位置。当四轴飞行器失去控制或者四轴飞行器距离您太远而无法轻松将其带回家时,此功能非常有用(特别是对于飞行新手)。
第8步:配置方向
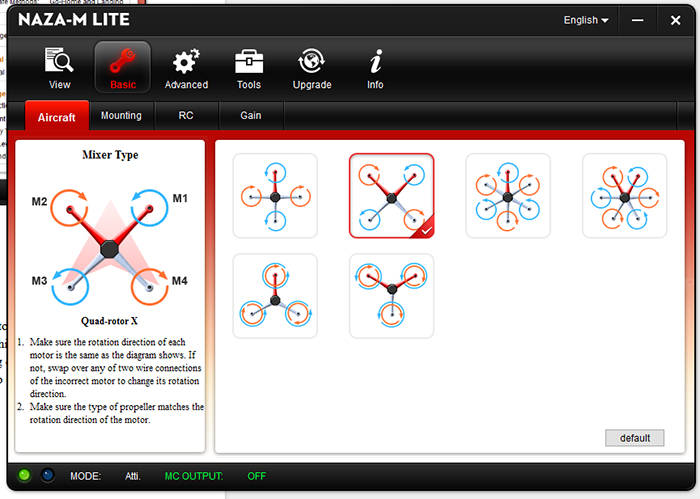
图9.框架布局选择界面
在Aircraft选项卡中,我们可以选择无人机的框架布局。我们应选择“Quad-rotor X”。没有选择第一个选项“Quad-rotor I”的原因是方向。您还记得下图吧?
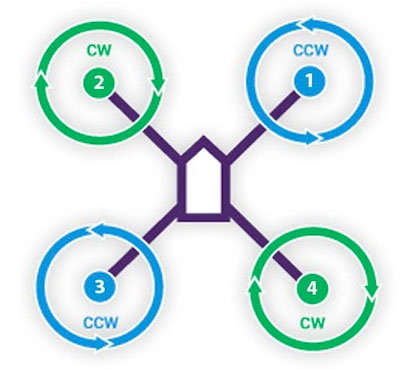
图10.NAZA的电机编号定义 / Ⓒkenstone6.net
之前我们根据上图显示的电机旋转方向将电机连至飞行控制器。图9中的红色机臂,即图10中的M2和M1表示四轴飞行器的前部。
第9步:配置GPS Mounting
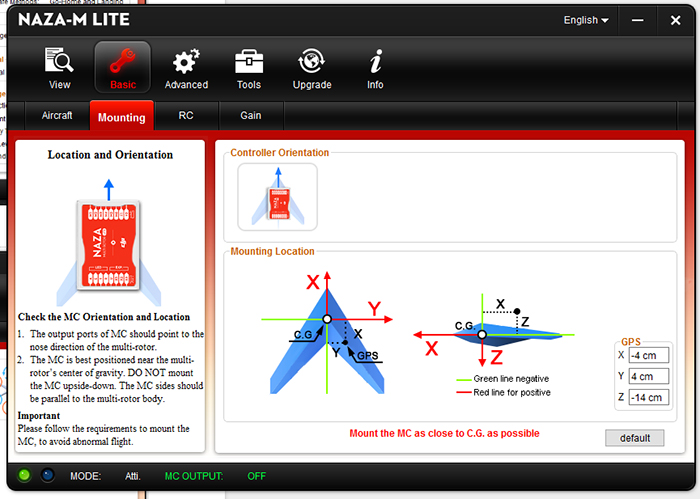
图11.GPS Mounting设置
在Mounting选项卡中,我们需要输入GPS坐标。首先,您需要平衡四轴飞行器的重心使其在中心板的正中。然后,在X、Y、Z轴(图11)填入GPS的机身中点以及四轴飞行器重心。MC ESC端口的方向应指向机头方向。
第10步:配置RC
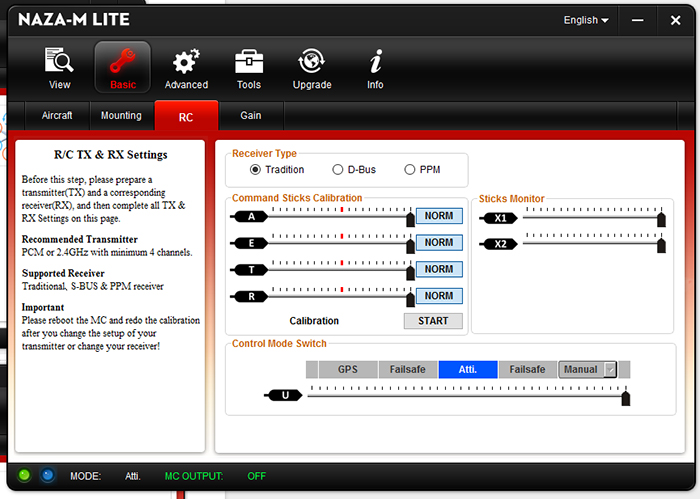
图12.R/C TX和RX设置
在此页面上,您可以查看每个通道的数值和当前的飞行模式。确保将Receiver Type选为Tradition。其他选项保持不变。“Gain”页面可以忽略。
第11步:配置电机怠速
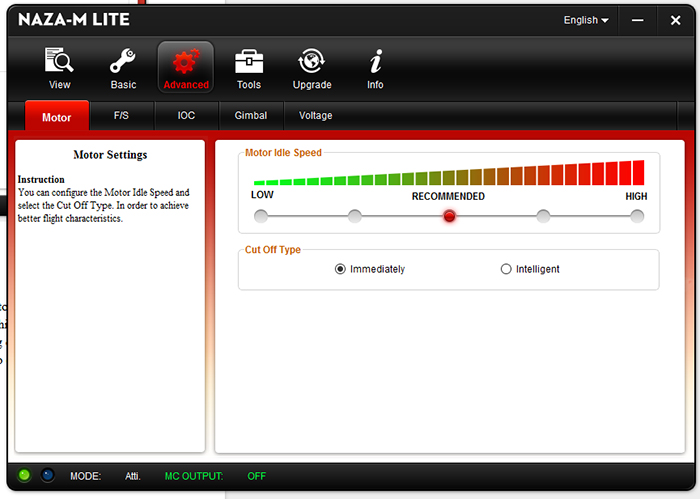
图13.电机设置
请将Motor Idle Speed设为RECOMMENDED,将Cut Off Type设为Immediately。
第12步:启用故障保护
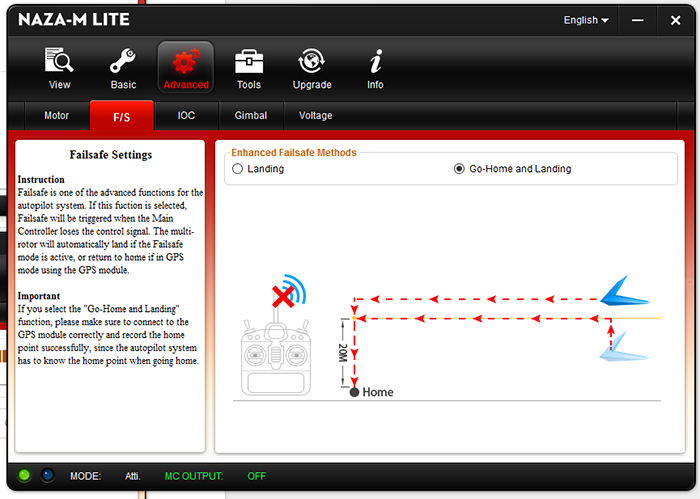
图14.故障保护设置
这是我们选择进入故障保护飞行模式时发生的情况的页面。我选择了“Go-Home and Landing”而不是“Landing”,这是因为故障保护功能激活后,“Landing“会让无人机在当前位置立即降落,即使这并不是一个安全的降落点。取而代之的” Go-Home and Landing”选项会让四轴飞行器升至20m的高度(如果飞行高度高于20m,那么保持不变),然后自己飞到起飞点上方,然后慢慢降落。
第13步:启用方向锁定
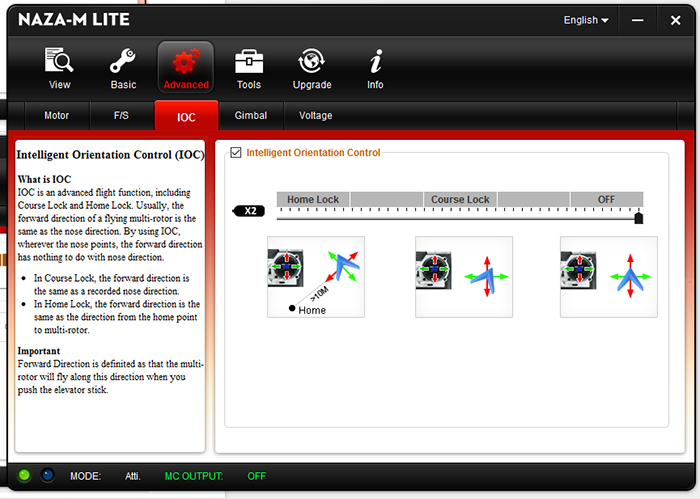
图15.智能方向控制(IOC)设置
IOC基本上是无头模式,当您尝试将相机定位某个特定角度时很有用。有两种锁定方式:返航点锁定(前进方向=记录的机头方向)和航向锁定(前进方向=四轴飞行器的原点)。我们不会使用这些锁定。请将这2个通道设为“OFF”。
请忽略“Gimbal”配置页面。
第14步:配置电池故障保护
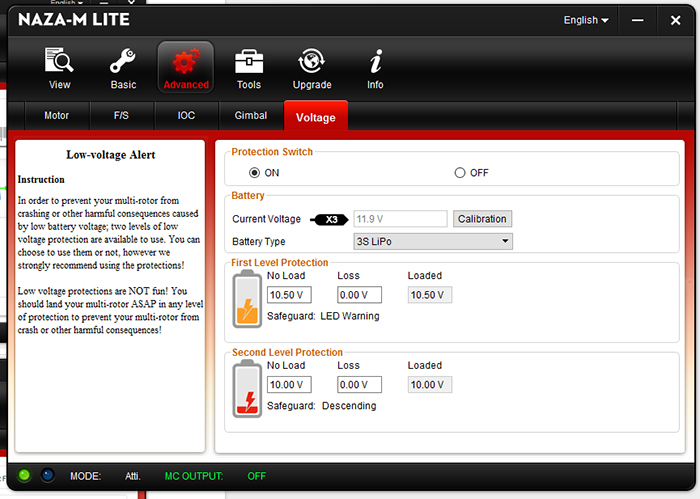
图16.电池故障保护页面
正如本系列第1部分描述的,使用LiPo电池时一定要小心,务必确保安全。飞行过程中我们最应该关注电池的电压。为防止电池过度放电,将Protection Switch设置为”ON”来启用低电压警报,然后将电池类型更改为3S LiPo。我建议将“First Level Protection”负载电压设置为10.50V,将“Second Level Protection”负载电压设置为10.00V。
“First Level Protection“只会导致NAZA LED指示灯红光快速闪烁。如果在飞行过程中看到此警报,应安全降落无人机。如果等待“二级保护”生效,那么四轴飞行器会自动着陆,以防止电池损坏。
第15步:校准IMU
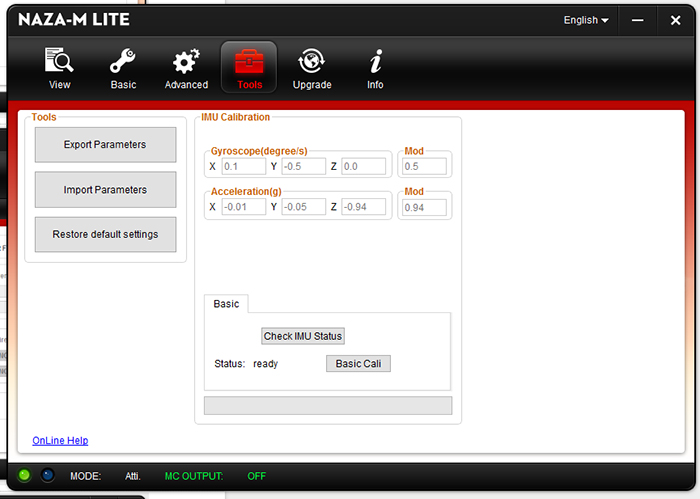
图17.IMU校准页面
第一次驾驶四轴飞行器之前,请务必校准陀螺仪和加速度计。为此,只需将四轴飞行器放在一个水平面上,然后单击页面底部附近的“Basic Cali”按钮即可。
本文到此结束!在下一篇文章中,我们将介绍如何设置FPV。这部分非常重要,因为它允许通过WiFi将四轴飞行器的实时视频流从Raspberry Pi传送到移动设备。我们会用到一部安卓手机。我们还将在飞行四轴飞行器之前创建一个飞行前检查清单。

Brenton Sutherland
Brenton目前就读于滑铁卢大学软件工程专业,拥有多年C++和Python编程经验,并且开发过多个Raspberry Pi和Arduino项目。
审核编辑黄宇
-
无人机
+关注
关注
237文章
11445浏览量
197169 -
Raspberry Pi
+关注
关注
2文章
622浏览量
24130
发布评论请先 登录
聚焦深圳无人机大会,无人机反制总有一个误区:只选整机,不挑AI

四轴无人机控制核心丨笙泉新品(CGF062A) 融合MCU与MDE优势, 实现稳定高效的飞行表现
2026新型无人机拦截反制AI模组
新规落地后无人机起飞不难,如何通过3225封装确保特种无人机系统稳定运行?

GNSS 卫星导航信号模拟器:无人机精准飞行的 “隐形考官”
ce认证对无人机有要求吗

陀螺仪在无人机中的应用:无人机精准飞行的关键保障

离轴技术:赋能无人机精准配送的核心芯片应用
见闻|日本公司用纸造军用无人机

科普|无人机反制枪介绍
爱普生M-G370PDF复杂地形下无人机飞行的卓越应用

低空物流:无人机开启未来配送新篇章
安森美分析无人机市场发展趋势
爱普生M-G370PDS惯性测量单元在无人机导航中的应用




评论