 自适应四轮底盘的制作分享
自适应四轮底盘的制作分享

1.运动功能说明
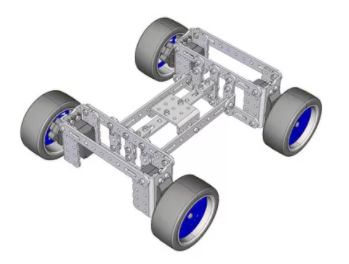
自适应四轮底盘可以通过左侧2个驱动轮和右侧2个驱动轮的差速运动配合来实现前进、后退、原地转向、大半径转向等基本行驶功能。可以在凸凹不平的地面上行驶。


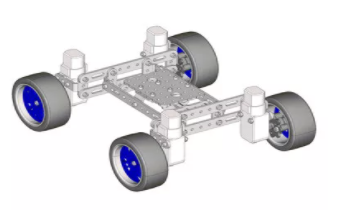
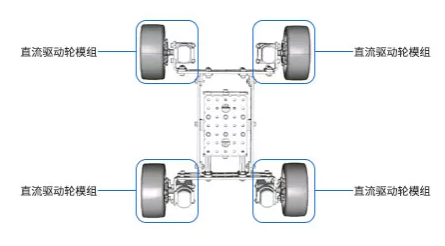
2.结构说明
样机包含四个直流驱动轮模组,固定在一个由连杆组构成的悬架上,具备悬挂功能,有更好的越障、抓地能力,还能降低车身颠簸。
3.运动功能实现
3.1 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:

由于同侧的驱动轮的运动状态始终是一样的。因此同侧的两个直流电机可以通过1拖2电机线共用1个直流电机接口。

先将同侧直流电机接在1条1拖2电机线上,然后在分别接在两个直流电机接口上,两个直流电机接口的针脚号分别为(D5,D6)以及(D9,D10),并将主控板和电池在车身固定好。
3.2 编写程序【完整代码详见 https://www.robotway.com/h-col-124.html】
前进功能的代码
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-31 https://www.robotway.com/ ------------------------------ 实验功能: 实现自适应四轮底盘前进. ----------------------------------------------------- 实验接线: 一拖二直流电机线:左侧车轮接:D9,D10 | | | | .-----------------------------------. | | | |-------. | |【车头】| | |-------* | | *-----------------------------------* | | | | 一拖二直流电机线:右侧车轮接:D5,D6 ------------------------------------------------------------------------------------*/ voidForward(); // 前进 //程序初始化部分:设置电机引脚为输出模式 voidsetup() { pinMode( 5 , OUTPUT); //将引脚5设置为输出模式 pinMode( 6 , OUTPUT); //将引脚6设置为输出模式 pinMode( 9 , OUTPUT); //将引脚9设置为输出模式 pinMode( 10 , OUTPUT);//将引脚10设置为输出模式 } //主程序部分:小车前进 voidloop() { Forward(); } //封装小车前进动作子程序 voidForward() { digitalWrite( 5 , LOW ); //右轮前进 digitalWrite( 6 , HIGH ); digitalWrite( 9 , LOW ); //左轮前进 digitalWrite( 10 , HIGH ); } |
原地转向功能的代码
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-31 https://www.robotway.com/ ------------------------------------ 实验功能: 实现自适应四轮底盘原地旋转(差速方式). 本实验现象为四轮四驱底盘原地左转. ---------------------------------------------------- 实验接线: 一拖三直流电机线:左侧车轮接:D9,D10 | | | | | | .-----------------------------------. | | | |-------. | |【车头】| | |-------* | | *-----------------------------------* | | | | | | 一拖三直流电机线:右侧车轮接:D5,D6 ------------------------------------------------------------------------------------*/ voidturn_Left(); // 原地转向(本示例为原地左转) //程序初始化部分:设置电机引脚为输出模式 voidsetup() { pinMode( 5 , OUTPUT); //将引脚5设置为输出模式 pinMode( 6 , OUTPUT); //将引脚6设置为输出模式 pinMode( 9 , OUTPUT); //将引脚9设置为输出模式 pinMode( 10 , OUTPUT);//将引脚10设置为输出模式 } //主程序部分:小车差速自转[本示例为小车左转] voidloop() { turn_Left(); } //封装小车自转动作子程序(本示例为左转) voidturn_Left(){ digitalWrite( 5 , LOW ); //右轮前进 digitalWrite( 6 , HIGH ); digitalWrite( 9 , HIGH ); //左轮后退 digitalWrite( 10 , LOW); } |
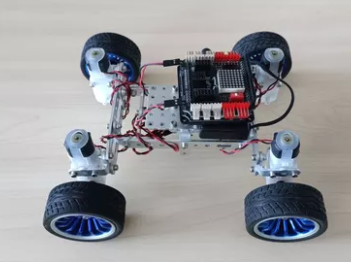
4.扩展样机
本样机可以通过使用不同的驱动轮模组,或者对连杆组悬架进行改造来实现扩展,如下图所示:
审核编辑黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
直流
+关注
关注
7文章
468浏览量
44187 -
电机
+关注
关注
145文章
9706浏览量
154812 -
小车
+关注
关注
0文章
55浏览量
21615 -
模组
+关注
关注
6文章
1797浏览量
32362
发布评论请先 登录
相关推荐
热点推荐
【科普】干货!带你从0了解移动机器人(六) (底盘结构类型)
结构之一,其底盘结构由1个舵轮、2个定向轮组成,在叉车上面有着非常广泛的应用。单舵轮底盘结构可以直接适应各种地面,保证驱动舵轮一定着地。结构简单、成本低,由于是单

基于AccelDSP的自适应滤波器设计
【作者】:袁江南;汤碧玉;陈辉煌;【来源】:《厦门大学学报(自然科学版)》2010年02期【摘要】:给出了一种自适应滤波器的设计和FPGA的实现方法.简要分析了最小均方误差(LMS)、归一化最小均方
发表于 04-24 09:01
微型迷你小车底盘
`本小车底盘由四个微型减速器、四个微型小车轮、四颗M2X12mm的螺丝、两根直径2mm长20mm的铁轴、两条7mmX7mmX153mm带孔塑料条组成,
发表于 04-20 00:21
自适应数字传感器设计
信号,这样会使测试结果的分析造成偏差。自适应数字传感器在选择高量程加速度传感器的条件下,能够根据加速度信号的幅值自动调整测试增益,保持加速度信号的完整输出,拓宽了动态测试范围,实现了加速度传感器测量
发表于 11-08 16:23
基于RT-Thread+RA6M4的麦轮结构的底盘运动控制系统设计案例
1、基于RT-Thread+RA6M4的麦轮结构的底盘运动控制系统设计本项目设计了一个麦轮结构的小车底盘运动系统,经过对底盘的运动学分析,解
发表于 08-17 14:50
模糊自适应PID在汽车底盘测功机中的仿真研究
在汽车底盘测功机研究中,由于汽车底盘测功机是一个复杂的时变非线性、大惯性系统。传统的PID控制对于非线性、时变性的系统难以达到控制精度的要求,而模糊自适应PID控制具有在
发表于 05-06 11:19
•58次下载

什么是自适应控制_自适应控制基本原理
自适应控制包括模型参考自适应控制和自校正控制两个分支。前者是20世纪50年代建立起来的,它是通过自适应机构来克服系统模型参数的不确定性;后者是瑞典学者Astrom1973年提出的,它是通过在线估计系统模型参数,进而修改控制器的参
发表于 03-27 09:35
•5.9w次阅读
自适应控制的优缺点_自适应控制存在的问题及发展
近年来,自校正控制技术如雨后春笋般地迅速发展。关于离散时间随机自适应控制的稳定性和收敛性,澳大刊亚纽卡斯尔大学的Goodwin作出了有益的贡献。自寻优自适应控制系统、变结构白适应控制系统也得到了相应
自适应天线系统简介!自适应天线系统研制概况!
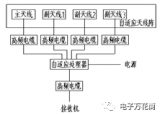
自适应天线系统主要由天线阵、自适应处理器以及射频电缆网构成。其中,天线阵由多个天线单元构成,通常为四个天线,一个为主天线,接收有用信号,其余为辅助天线,产生对消干扰的参考信号。自适应天
什么是自适应光学?自适应光学原理与方法的发展
目前,世界上大型的望远镜系统都采用了自适应光学技术,自适应光学的出现为补偿动态波前扰动,提高光波质量提供了新的研究方向。
60多年来,自适应光学技术获得蓬勃发展,现已应用于天文学、空间光学、激光、生物医学等领域。
发表于 03-11 10:27
•4562次阅读



评论