 小型双轮差速底盘的制作
小型双轮差速底盘的制作

1.运动功能说明
小型双轮差速底盘可以通过两个驱动轮的 差速运动 来实现前进、后退、原地转向、大半径转向等基本行驶功能。


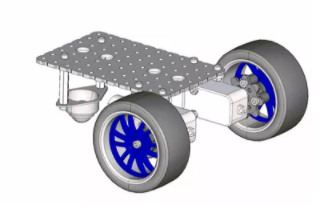
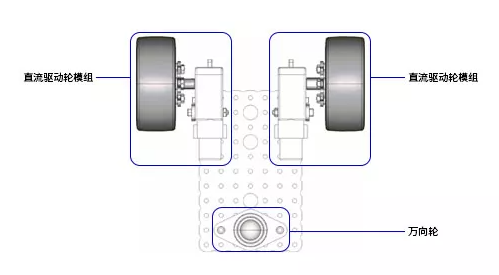
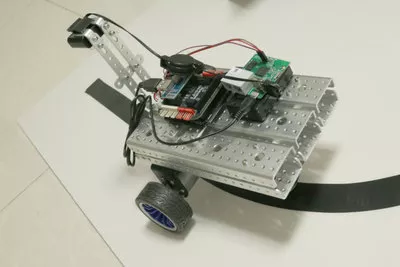
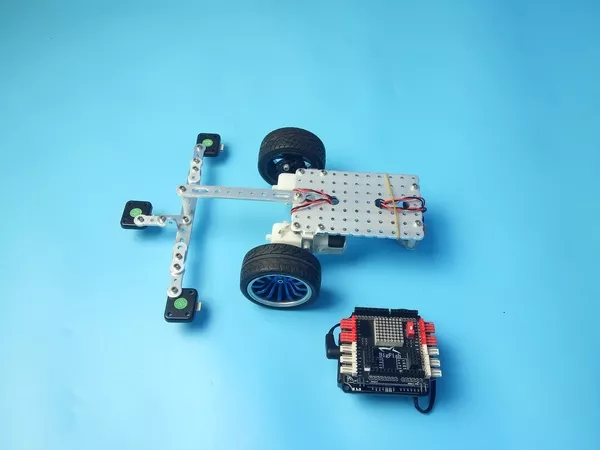
2.结构说明
该样机由两个 直流驱动轮模组 构成,驱动轮模组呈轴对称分布在车架上,再使用万向轮对车尾进行支撑,保持车身水平。
3.运动功能实现
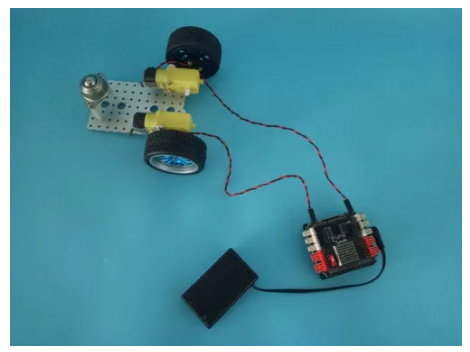
3.1 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:

将TT马达接在两个直流电机接口上,两个直流电机接口的针脚号分别为(D5,D6)以及(D9,D10),并将主控板和电池在车身固定好。
3.2 编写程序【完整代码请参考https://www.robotway.com/h-col-113.html】
前进功能的代码
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-26 https://www.robotway.com/ -------------------------------- 实验功能: 实现小车前进. -------------------------------- 实验接线: 车头 .--------. | | | | 左轮 | | 右轮 D5, D6 *--------* D9, D10 ----------------------------------------------------------------------------------*/ void Forward(); // 前进 //程序初始化部分. void setup() { pinMode( 5 , OUTPUT); //将引脚5设置为输出模式 pinMode( 6 , OUTPUT); //将引脚6设置为输出模式 pinMode( 9 , OUTPUT); //将引脚9设置为输出模式 pinMode( 10 , OUTPUT); //将引脚10设置为输出模式 } //主程序部分 void loop() { Forward(); delay( 100 ); } // forward子程序封装. void Forward() { digitalWrite( 5 , LOW ); //将引脚5设置为高电平 digitalWrite( 6 , HIGH ); //将引脚6设置为低电平 digitalWrite( 9 , LOW ); //将引脚9设置为高电平 digitalWrite( 10 , HIGH); //将引脚10设置为低电平 } |
原地转向功能的代码
|
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-26 https://www.robotway.com/ ---------------------------------------------------------- 实验功能: 实现小车原地转向. ---------------------------------------------------------- 实验接线: 车头 .--------. | | | | 左轮 | | 右轮 D5, D6 *--------* D9, D10 ----------------------------------------------------------------------------------*/ // 原地转向 void turn_in_Place(); //程序初始化部分. void setup() { pinMode( 5 , OUTPUT); //将引脚5设置为输出模式 pinMode( 6 , OUTPUT); //将引脚6设置为输出模式 pinMode( 9 , OUTPUT); //将引脚9设置为输出模式 pinMode( 10 , OUTPUT); //将引脚10设置为输出模式 } //主程序部分 void loop() { turn_in_Place(); delay( 100 ); } //原地转向子程序封装. void turn_in_Place() { digitalWrite( 5 , LOW ); //将引脚5设置为高电平 digitalWrite( 6 , HIGH ); //将引脚6设置为低电平 digitalWrite( 9 , HIGH ); //将引脚9设置为高电平 digitalWrite( 10 , LOW); //将引脚10设置为低电平 } |
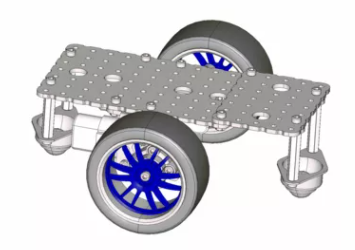
4.扩展样机
本样机也有一些扩展,如使用多个万向轮做支撑的版本,如下图所示。
5.资料内容
样机3D文件
例程源代码
资料下载详见 https://www.robotway.com/h-col-113.html
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
接口
+关注
关注
33文章
9635浏览量
157801 -
直流电机
+关注
关注
36文章
1786浏览量
74341 -
底盘
+关注
关注
3文章
305浏览量
15364
发布评论请先 登录
相关推荐
热点推荐
如何搭建实体机器人ros底盘
目录介绍一、底盘主控板二、嵌入式开发板1. 与上位机pc的关系2. 与STM32主控板的关系介绍自下而上的分析实体机器人(差分轮速机器人)搭建中的关键过程。一、底盘主控板本部分搭建实体
发表于 01-20 07:36
差分底盘的设计资料分享
SLAM+语音机器人DIY系列:(四)差分底盘设计——1.stm32主控硬件设计摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难
发表于 02-14 06:29
全方面解读斯柯达新速派底盘
全新速派带来了斯柯达最新的设计理念,外观设计相比老款更时尚张扬,而且几乎配备了该级别车型具备的所有高科技配置,再有加长轴距之后更优异的空间表现,都将是直接的竞争力体现。那么究竟新速派靓丽外观的底下,它的底盘如何?今天,我们就一起
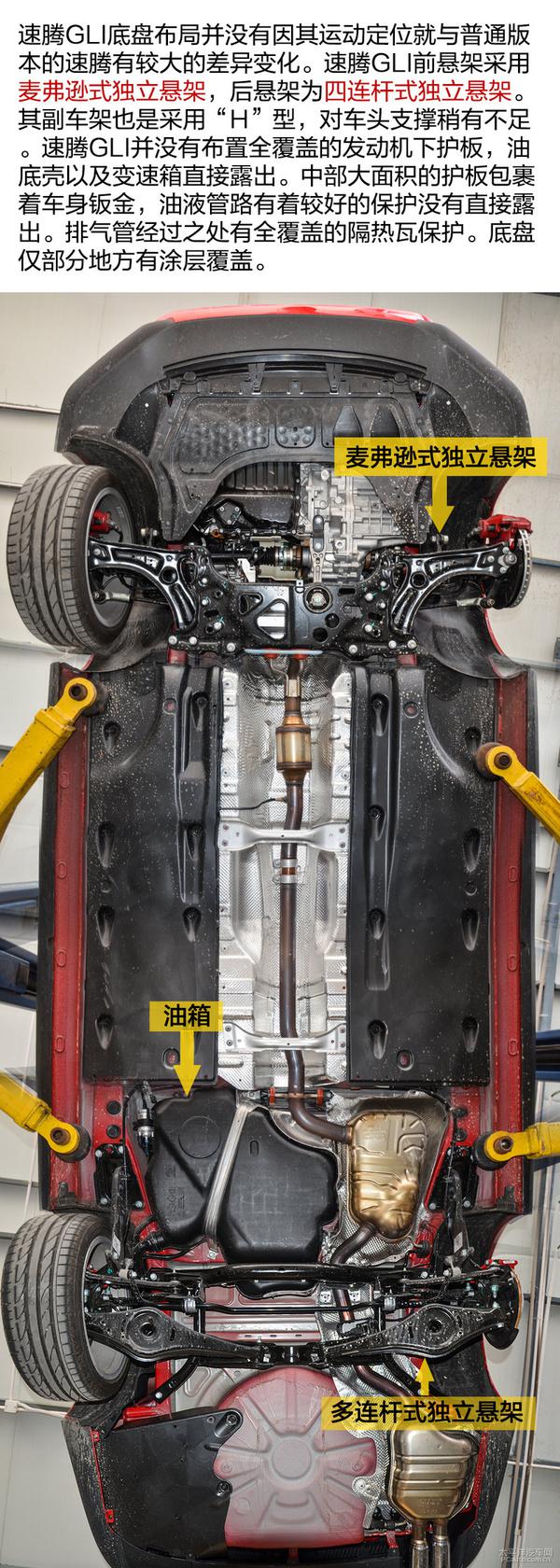
深度解析一汽-大众速腾GLI底盘
腾GLI就是基于这样考虑而存在的车型。究竟速腾GLI底盘是否如同普通版速腾一样呢?还是更多偏向GTI的设定,下面掀开底盘看看。
小型双节履带底盘的制作
1.运动功能说明 双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过底盘运动与小臂运行的结合,实现上台阶、通过

小型三节履带底盘的制作
双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过底盘运动与小臂运行的结合,实现上台阶、通过坑洼地面等功能。
小型双轮差速底盘视觉循迹功能的实现
1. 任务描述 在机器人小车上搭载摄像头,摄像头采集图像信息并通过WiFi将信息传递给PC端,然后PC端使用OpenCV对摄像头读取到的视频进行灰度化、高斯滤波、腐蚀、膨胀等处理,使图像分为黑白两色。PC端进行图像信息处理并将处理结果传递为下位机,下位机接收上位机处理的图像信息结果后便会控制小车相应运动,小车运动包含前进、左转、右转、停止。 2. 电子硬件 在这个示例中,我们采用了以下硬件,请大家参考: 主控板 Basra(兼容Ard
如何实现双轮差速底盘躲避悬崖的功能?
1. 功能说明 本实验使用的样机为R023样机小型双轮差速底盘。在样机前方安装3个近红外传感器 ,实现机器人躲避悬崖、在某平台
双轮差速底盘三灰度循迹功能的实现
1. 功能说明 在小型双轮差速底盘样机前方安装3个 灰度传感器 ,实现机器人沿下图所指定的跑道路线进行运动的效果。 2. 使用样机
差速电机与无刷电机的区别是什么 差速电机和无刷电机哪个好
差速电机与无刷电机的区别是什么?结构上,无刷电机和差速电机有相似之处,也有转子和定子,只不过和差速
发表于 03-27 15:07
•1.7w次阅读



评论