 VASS05机器人2.20系统ProConOS_IO生成文件使用的接口
VASS05机器人2.20系统ProConOS_IO生成文件使用的接口
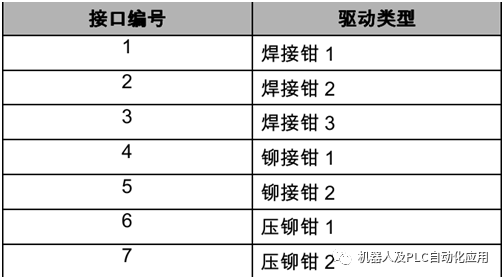
生成文件使用的接口:
2.选择激活ProConOS_IO,激活软件后开始进行寻找设备IO激活外部轴E1.
IO区域 焊钳1从705开始 焊钳2从865开始, 焊钳3从1025开始.
铆钳1 从1185开始, 铆钳2 从1265 开始. 压铆钳1从 1345开始
压铆钳2 从1425开始.
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27043浏览量
201425 -
IO接口
+关注
关注
0文章
27浏览量
13273
原文标题:VASS05机器人2.20系统ProConOS_IO接口解析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
什么是工业机器人
机械手之间有防护墙隔开,操作者可通过观察窗或闭路电视对从机械手操作机进行有效的监视,主从机械手系统的出现为机器人的产生为近代机器人的设计与制造作了铺垫。1954年美国戴沃尔最早提出了工业机器人
发表于 01-19 10:58
机器人视觉——机器人的“眼睛”
的,也是急需的,它是保证机器人能够工作于人类生活环境的重要条件。在工作中图像采集速度较低,以及图像处理需要较长时间,给系统带来明显的时滞。而机器视觉产品的引进,极大的解决了这一题目。机器
发表于 01-23 15:02
如何系统性地学习工业机器人技术?
`如何系统性地学习工业机器人技术?对于一个还没入门的想学机器人的小白而言,想快速见到成效的的话,找一所对自己胃口的机器人培训机构是很关键的,当然自己本身的决心和毅力离也很重要。工业
发表于 03-06 12:56
基于机器人的曲线焊接系统
和自由度的限制,焊枪难以到达某些焊缝,需加入焊接变位机拖动工件使相应焊缝处于理想的焊接位置,以方便机器人进行焊接操作。本研究设计了一种基于机器人的曲线焊接系统,采用机器人和 PLC联合
发表于 03-13 09:15
机器人VS人:替代还是协作?
财经新闻 2016年,第一财经发布智能写稿机器人“DT稿王”在商业领域,刚刚过去的有着“广告界奥斯卡”之称的戛纳国际创意节上,阿里正式发布了一款可以根据商品自动生成文案,并且文案品质与人写文案已无二致
发表于 09-20 16:07
机器人、协作机器人和移动机器人,你分的清楚吗
防护装备,并且没有加入任何安全功能。2016年后还有ISO/TS 15066可供使用。该技术规范参考ISO 10218-1和ISO 10218-2,给出了对“机器人系统和人员共享同一工作空间”的“协作
发表于 10-30 11:33
机器人系统是什么?
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及
发表于 09-10 10:44
焊接机器人的结构与原理
、焊接参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个起动命令,机器人将精确地按示教动作,一步步完成全部操作,实际示教与再现。焊接机器人结构:1、
发表于 11-16 16:18
机器人的控制系统
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本
发表于 09-13 08:40





 工商网监
工商网监
评论