 机器学习和智能算法在单外泌体的多维检测方面的机遇和挑战
机器学习和智能算法在单外泌体的多维检测方面的机遇和挑战

外泌体是一类潜在的生物标志物,在细胞间通讯、疾病诊断和治疗中都起着非常重要的作用。为了获得更准确的外泌体组成成分/异质性/功能的信息,并将其实际应用于临床,近年来科研人员报道了一系列分离外泌体的方法。基于微流控的方法可以操控微米/纳米级颗粒和实现高通量分析,东北大学王建华课题组综述了近几年基于微流控的外泌体分离方法,包括免疫亲和微流控芯片、尺寸介导微流控分离芯片和多方法集成的微流控装置等,并在此基础上介绍了将微/纳流控与先进的检测技术相结合应用于(单)囊泡水平上外泌体分离分析的方法。此外,该综述文章还讨论了机器学习和智能算法在单外泌体的多维检测方面的机遇和挑战。相关工作以“Microfluidic Strategies for the Isolation and Profiling of Exosomes”为题发表于Trends inAnalytical Chemistry期刊。

图1 基于微流控芯片的外泌体分离和单个细胞外囊泡分析的方法
免疫亲和微流控分离方法
外泌体包含多种跨膜蛋白(CD63,CD9和CD81等)和生物标志物蛋白(EpCAM,HER2和CA-125等)。因此,基于外泌体表面蛋白和抗体/适配体之间的特异性结合,可以实现外泌体的免疫亲和捕获。免疫亲和微流控分离方法可以分为两类:(1)抗体/适配体修饰磁珠捕获体液内外泌体;(2)具有抗体/适配体修饰界面的微流控芯片实现外泌体的分离。基于磁珠的微流控芯片可以使用磁铁将磁珠保留在微流控腔室内以同时实现外泌体的免疫亲和捕获和下游分析。通过制备具有多孔表面/微柱的微流控芯片以实现外泌体的高效捕获,并结合释放机制获得完整的外泌体。综上,免疫亲和微流控方法可以实现外泌体的高纯度和高特异性捕获和分离,但是存在因外泌体异质性导致的捕获效率不高、修饰步骤繁琐等缺点。
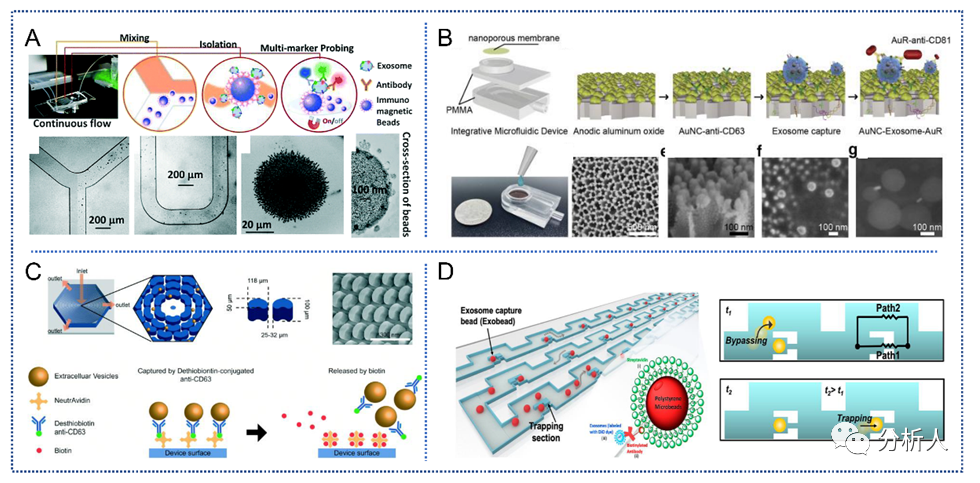
图2 基于免疫亲和微流控的外泌体分离方法
尺寸介导微流控分离方法
尺寸介导的微流控分离方法提供了从小尺寸蛋白质和其它大尺寸囊泡中有效分离外泌体和区分外泌体亚群的机会。该方法包括主动分离和被动分离。主动分离方法通常需要引入外加力场(声场和电场)来实现外泌体的分离。被动分离则是基于流体动力学达到区分不同尺寸颗粒的目的。例如,基于确定性侧向位移(DLD),具有纳米级孔径的过滤膜、纳米线和粘弹性流体等原理的微流控芯片可以实现生物体液中外泌体的无标记、无外加场分离。
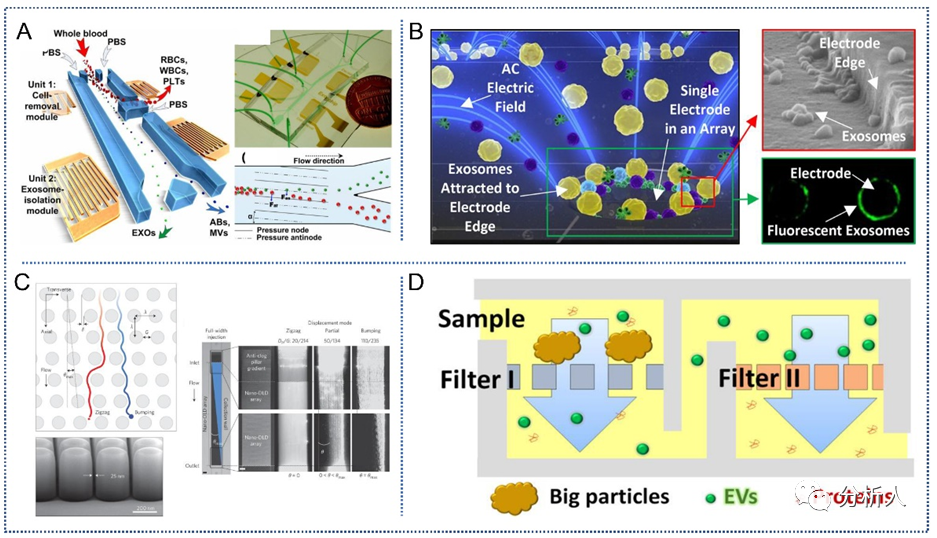
图3 基于尺寸介导的微流控分离方法
集成微流控分离方法
为了克服上述微流控分离方法所存在的缺点,研究者们尝试将其中一些方法结合起来实现外泌体的高效分离。例如,将主动分离方法(电场)与被动分离方法(过滤膜)相结合实现无标记、操作时间短、回收率高、损伤小等优点的外泌体高效分离,并实现下游分析。
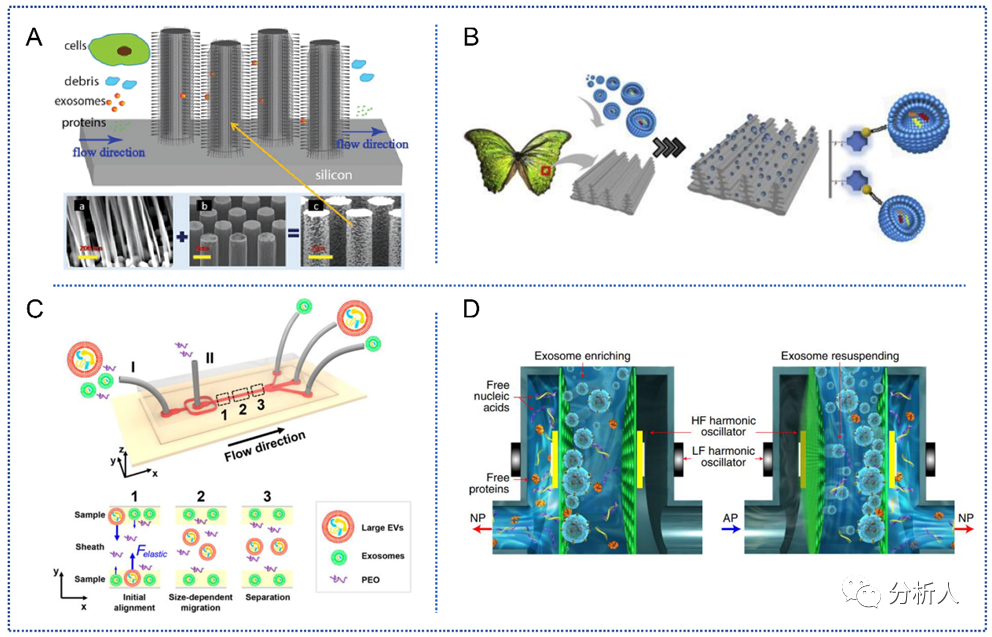
图4 基于尺寸介导的/集成微流控分离方法
单外泌体分离分析方法
外泌体的大小、组成成分、功能和细胞来源各不相同导致其存在强异质性。此外,外泌体的异质性也可能受到器官和组织起源的影响。因此,在单囊泡水平上了解和分析外泌体的性质是非常重要的。但是,大量已报道的方法都是集合分析方法,所获得的数据为外泌体的平均信息,而单个外泌体的信息仍然未知或未被检测到。因此,迫切需要开发新的技术来阐明单个外泌体的组成、功能和异质性等。该文介绍了目前已实现单外泌体分析的检测技术,包括超分辨显微镜、全内反射荧光显微镜、纳米等离激元传感器等,并重点总结了先进技术与微/纳流控相结合应用于单外泌体分析的方法。微流控芯片的使用不仅方便于实验条件的控制,而且减少了样品需求量。此外,强调了结合算法和机器学习的微流控分离分析策略在单个外泌体成像或检测方面显示出的巨大潜力。
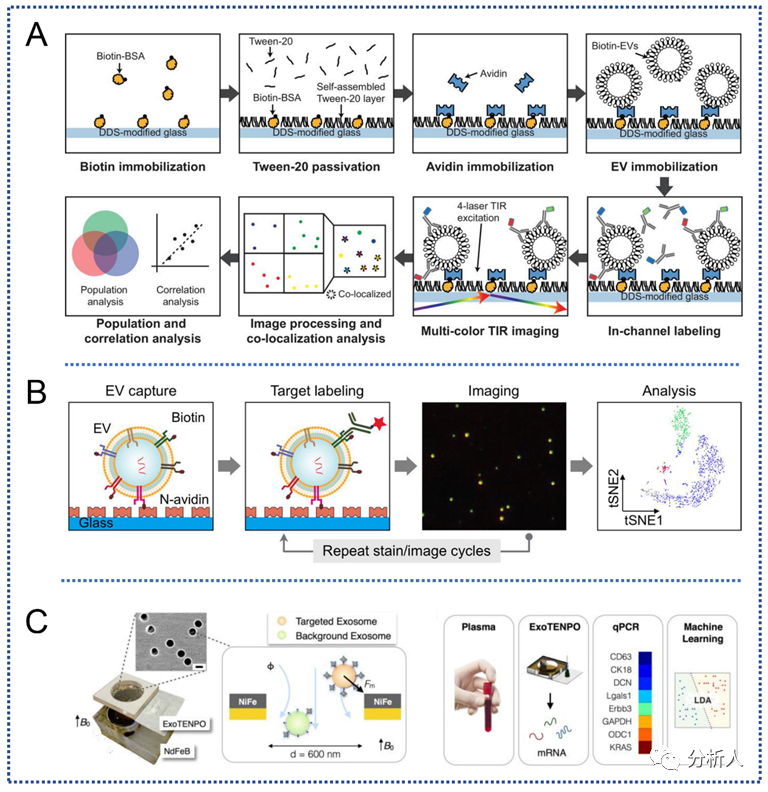
图5 单外泌体检测方法
综上所述,随着外泌体在癌症诊断和治疗中的潜力日益增长,开发一种适用于临床应用的高效分离外泌体的方法变得越来越重要。微流控技术由于其易于集成操作、样品消耗少、高通量等优势,在分离外泌体方面展现出了巨大的前景。作者主要总结和介绍了用于分离和分析复杂生物样本中外泌体的微流控芯片;提出了基于微流控的策略有望实现从少量生物体液中分离单个外泌体,并与先进检测技术、机器学习和算法相结合实现单外泌体的多维分析。相关工作为了解外泌体作用机制提供研究基础和未来发展方向,加速了外泌体相关研究从实验室走向临床应用。
审核编辑:郭婷
-
芯片
+关注
关注
463文章
54632浏览量
470941 -
机器学习
+关注
关注
67文章
8570浏览量
137421
原文标题:用于分离和分析外泌体的微流控策略
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
三维力传感器工作原理及应用领域是什么样的,在未来市场是占据怎么的地位?
2026年中国十大机器视觉公司的决胜逻辑:全栈能力与场景深耕
【2025夏季班正课】大模型Agent智能体开发实战 课分享
多智能体强化学习(MARL)核心概念与算法概览

黑芝麻智能推出面向机器人产业的SesameX多维智能计算平台
多种类几何尺寸集成智能仪器定制 一站式解决产线多维度测量需求
机器视觉检测PIN针
深度学习+多维感知!AI技术突破智能戒指边界
AI 边缘计算网关:开启智能新时代的钥匙—龙兴物联
新能源智能汽车战略机遇与挑战
多维科技TMR阵列电流传感器在电机控制中的电流检测应用

机器学习异常检测实战:用Isolation Forest快速构建无标签异常检测系统




评论