 区域短报文和全球短报文服务的区别在哪里
区域短报文和全球短报文服务的区别在哪里

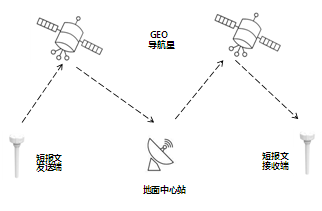
北斗系统是全球首个提供区域短报文通信服务和全球短报文服务的卫星导航系统,目前在边防、水利、林业、电力、海上通信等各个行业应用。支持北斗短报文通信服务的产品例如北斗短报文手持终端,北斗短报文平板终端等等,短报文通信服务已进入公众使用,很多人还不太明白北斗短报文通信服务的区别,短报文服务分区域短报文服务和全球短报文服务,具体服务其实各有差别。
一、全球短报文通信服务:
全球短报文通信服务是为特定用户提供接入的通信服务,通过14颗中圆地球轨道卫星,短报文发文最大单次报文长度40个汉字。
二、区域短报文通信服务:
区域短报文通信服务是有3颗北斗卫星,提供中国和周边地区数据传输能力服务,支持文字、图片、语音等传输服务,单次短报文长度为1000个汉字。
三、定位导航授时服务:
定位导航授时服务是通过30颗卫星,免费向全球用户提供服务,全球范围水平定位精度优于9米、垂直定位精度优于10米,测逮精度优于0.2米秒、授时精度优于20纳秒。国际搜救服务。通过6颗中圆地球轨道卫星,旨在向全球用户提供符合国际标准的遇险报警公益服务。创新设计返向链路,为求救者提供遇险搜救请求确认服务
以上就是全球短报文通信服务和区域短报文通信服务的区别内容,君驭品牌致力于北斗手持终端设备的研发生产销售,行业首批专注于北斗手持终端设备的国家高新技术企业,产品系列有北斗手持终端、北斗手持平板终端、北斗三防笔记本以及夜视仪等产品。产品支持模块化定制,解决成本和不同多功能模块集成,能够满足各行业用户需求。
审核编辑黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
北斗
+关注
关注
3文章
814浏览量
37834 -
北斗短报文
+关注
关注
1文章
27浏览量
5646
发布评论请先 登录
相关推荐
热点推荐
测试高温实验时出现睡眠唤醒后第三帧3C诊断报文未响应的情况,为什么?如何处理?
我在测试高温实验时出现睡眠唤醒后第三帧3C诊断报文未响应的情况,截取报文log如下:
1、以下为图莫斯通讯工具截取的部分报文log,其中间隔4s的两条报文:
2025-07-16 06
发表于 04-16 07:00
国产低轨卫星开发板重磅来袭!相比北斗它更胜一筹
它到底是什么?
容辉物联天启开发板TQN2是基于天启短报文技术打造的开发工具,专为无网/弱网场景设计:
依托天启卫星系统,覆盖全球范围,不受地面基站限制
通信原理:设备→卫星→服务器,
发表于 03-23 14:34
中兴通讯入围15项2026年全球移动大奖短名单
重磅!移动通信行业权威组织GSMA揭晓2026年全球移动大奖(GLOMO)短名单,中兴通讯携手合作伙伴成功入围15项短名单,覆盖11大类别!
北斗短报文:连接“信息孤岛”的天基生命线
在通信技术高度发达的今天,我们习惯于生活在无处不在的移动网络之中。然而,占地球表面大部分区域的海洋、沙漠、深山,仍是通信信号的“盲区”。北斗卫星导航系统的独门绝技——短报文通信,正是为了征服这些盲区而生,它如同一张覆盖苍穹的天基
北斗短报文芯片火了,小米手机商用,中移动终端公司放啥大招?
电子发烧友原创 章鹰 北斗短报文通信是北斗卫星导航系统区别于其它全球卫星导航系统独有的特色服务之一,在移动通信、互联网等无法覆盖的地区,人们

如何同时指定can硬件滤波器的只接收id为0 和id为3的报文呢?
如何同时指定can硬件滤波器的 只接收id为0 和id为3的报文呢
我目前只会用 RT_CAN_FILTER_STD_INIT(3, RT_NULL, RT_NULL)去指定id为3的报文,但是使用这个指定0 就不行 请问如何同时指定这两个id号呢?
发表于 09-28 07:46
移植网络PHY芯片驱动,如何融入 rt-thread 的网络体系,并添加新的以太网类型的报文?
PHY 芯片最底层收发以太网报文,有可能组成 VLAN 网络);
我要实现一个新的以太网类型报文(HPGP报文,以太网报文类型为 0x88E1),要求能在应用层收发该以太网类型
发表于 09-22 06:11
用于各种设备协议间做报文转换的网关是什么
用于各种设备协议间做报文转换的网关通常被称为协议转换网关,也常被称为工业协议网关(在工业场景中)或多协议网关。它是一种专门用于解决不同设备、系统或网络之间因协议不兼容而无法直接通信的中间设备,核心

智芯公司4G+北斗短报文融合通信产品完成试点应用
近日,智芯公司“4G+北斗短报文”双通道通信产品在甘肃、江西等多地无公网覆盖或覆盖薄弱地区完成试点应用,其智能融合的通信模式有效解决电力物联网“通信孤岛”难题,为能源互联网建设再添利器。
科普|北斗短报文和北斗短信的区别,专业干货文章
近日,北方大部分地区短强降雨引起了局部地区的洪涝灾害,中国移动宣布提供免费一个月的北斗短信服务,中国移动的部分机型用户,可以开通北斗短信服务,没有任何手机信号的情况下,也可以发送20个汉字的短信

MEMS定向短节为何“术业有专攻”?
MEMS定向短节,顾名思义,是采用MEMS传感器,通过捷联惯性测量技术实现方位与姿态定向,并以模块化短节形态存在的测量装置。但同为MEMS定向短节,ER-Gyro-15/ER-Gyro-19
顶坚北斗短报文+天通卫星+RTK手持终端:为测绘外业赋能
顶坚北斗短报文+天通卫星+RTK手持终端通过技术融合与功能互补,构建了“空天地一体化”测绘解决方案,显著提升了测绘外业在复杂环境下的作业效率、数据可靠性及安全性,成为推动行业智能化升级的核心工具

基于开源鸿蒙的5G北斗短报文智能终端解决方案
在数字化浪潮中,深圳市芯盛智能信息有限公司以开源鸿蒙系统为核心驱动力,推出新一代5G短报文智能终端,全面推动短报文通信技术迈向智能化新高度,打造新一代智慧通信生态体系。凭借技术革新赋能



评论