 AUTOSAR CAN网络管理报文的数据场格式
AUTOSAR CAN网络管理报文的数据场格式

在网络管理中,网络中的各个节点通过网络管理报文进 行通信,AUTOSAR CAN网络管理报文的数据场格式见表

注意:NM报文就是CAN报文。NM报文符合CAN报文的格式,由帧起始、仲裁场、控制场、数据场、CRC场、应答场、帧结尾组成。
一般厂家在设计的时候会规定好NM报文的ID范围。
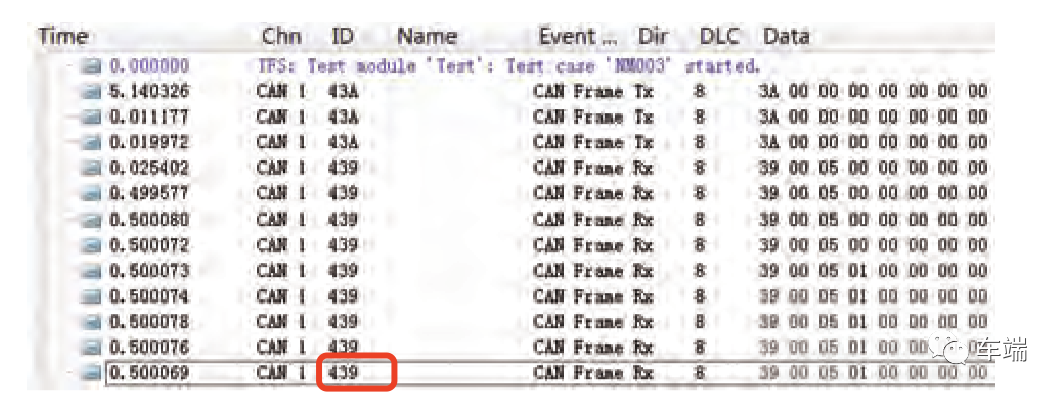
举个例子:规定标识符在0x500到0x5FF范围为NM报文。当在CANoe中抓取到此ID范围内的报文,那就是NM报文。如下图中的例子:报文ID= 0x502;
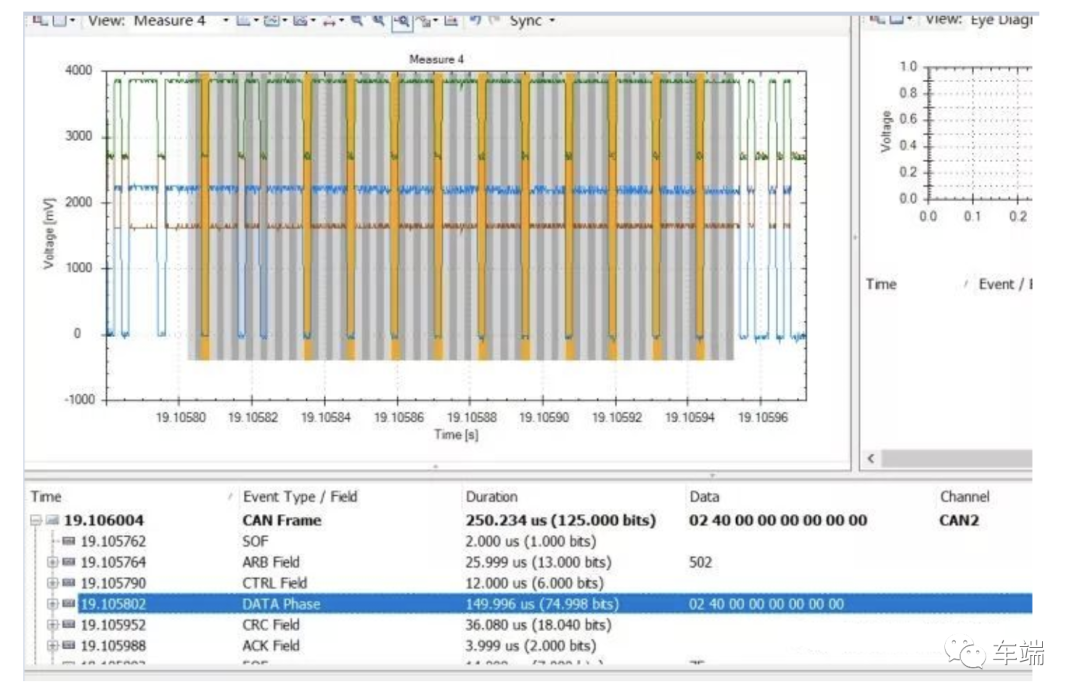
表1中,字节0为ECU Address,作为源节点标识符,用 以告知其他节点该报文是由哪个节点发送的;处于CAN网 络中的每个节点都会分配一个唯一的标识符,本文中网络 管理报文的ECU Address=0x439。此报文的ID=一个基础值+ECU的ID,例如厂家规定基础值为0x400,那么此报文的ID=0x500+0x39=0x439。
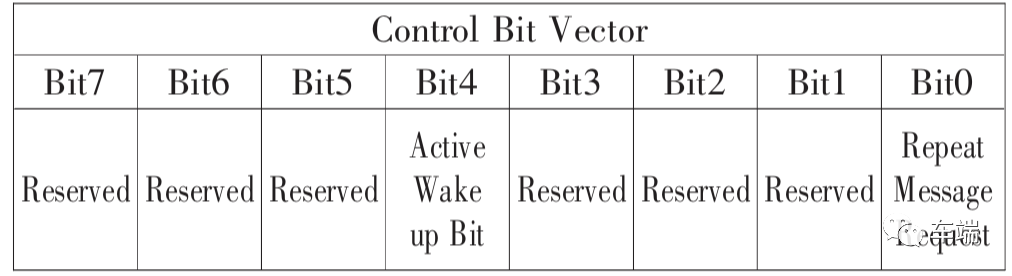
字节1为控制比特向量, 字节2~7为用户自定义的数据信息。本文中字节2User date 0 用于将网络唤醒原因显示出来,其他自定义数据作为扩展 保留,用“0x00”填充。表2列出了控制比特向量各位的含 义。其中Bit0为重复报文状态请求位,置1代表需进入重复 报文发送状态,清零代表不再需要重复报文发送状态;Bit4位为激活唤醒位,置1代表主动唤醒状态,清零代表被 动唤醒状态。其他位为保留位,以0填充。Byte1:control bit vector定义如下:
审核编辑 :李倩
-
CAN
+关注
关注
59文章
3107浏览量
473853 -
网络管理
+关注
关注
0文章
129浏览量
29426 -
AUTOSAR
+关注
关注
11文章
413浏览量
23791
原文标题:AUTOSAR CAN网络管理报文的数据场格式
文章出处:【微信号:智能汽车电子与软件,微信公众号:智能汽车电子与软件】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
CAN 转 Modbus RTU 工业数据采集网关搭建实时数据通道

CAN数据传输错误怎么解决?
CANopen协议核心秘籍:NMT、SDO、PDO、心跳报文一网打尽

虹科HK-CoreTest:专业的CAN/CAN FD总线测试软件,高效易用
AT32F系列 CAN通讯模式使用
广成科技蓝牙转CAN模块的作用和应用场景
如何同时指定can硬件滤波器的只接收id为0 和id为3的报文呢?
移植网络PHY芯片驱动,如何融入 rt-thread 的网络体系,并添加新的以太网类型的报文?
移植CANfestival,发现can无法接收数据,为什么?
什么,以太网能传CAN报文?

ProfiNet转CAN/CANopen网关技术详解

嵌入式接口通识知识之CAN接口
用于各种设备协议间做报文转换的网关是什么

车载 CAN-Bus 数据记录仪




评论