 FM激光雷达的比较和设计权衡
FM激光雷达的比较和设计权衡
自动驾驶汽车传感器堆栈对激光雷达的需求导致 2016 年至 2018 年间 OEM 的投资激增。70 多家公司获得了总计超过 10 亿美元的资金,用于将竞争性激光雷达方法推向市场。虽然这些技术赌注需要数年时间才能成熟为完整的产品,但供过于求导致分析师和记者不断猜测谁将成为赢家和输家。
许多作者将光束扫描技术作为比较的主轴。给定的产品是机械的、固态的、MEMS 还是闪存?对这种技术差异化的关注可能是早期市场推动者积极承诺提供超低成本固态扫描激光雷达的痕迹。这种对扫描技术的关注分散了对更基本问题的讨论:激光雷达如何测量距离?它可以测量速度吗?并且——假设需要芯片组集成以实现汽车量的可扩展性——一种方法在规模上相对于另一种方法的影响是什么?
脉冲飞行时间或调幅“AM”激光雷达系统依赖于对反向散射激光脉冲的直接检测。脉冲激光源的成本和性能各不相同。灵敏的光电探测器通过将反射的光功率直接转换为电信号来测量飞行时间。这种方法只对目标的距离敏感,而不是它的速度。它还受到动态范围有限的影响,这通常需要调制接收器增益。对于明亮的目标,增益会回拨,对于昏暗的目标,增益会增加。最终,这种增益调整游戏会限制性能并产生图像伪影。
调频连续波“FMCW”或“FM”激光雷达使用不同的方法来测量距离。频率调制是一种借鉴现代雷达系统的测量技术。范围信息不是直接测量脉冲飞行时间,而是在频域中编码。存在多种用于产生频率调制激光信号的方法,其中许多方法非常适合低成本光子集成。这些传感器中使用的相干接收器具有许多其他优点,包括抗干扰性和高灵敏度,下文将详细讨论。
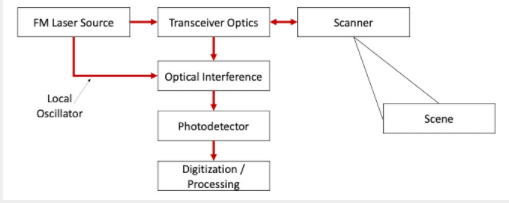
显示了支持 FM 激光雷达相干检测的基本干涉电路。
FM 激光雷达使用相干检测通过将接收到的光与激光源的本地副本本地振荡器 (LO) 进行光学组合来测量背反射电场。这种干涉过程在低成本、坚固的 PIN 光电二极管上产生电信号。与方向检测相反,这些信号与接收到的电场与 LO 的乘积成正比。除了下面概述的优点外,这还导致了高动态范围测量,因为相干激光雷达光电探测器信号按背反射信号功率的平方根缩放。
在 AM 和 FM 激光雷达中,光电探测器都会生成用于分析的时间序列数据。在 AM 的情况下,可以按时间顺序分析时间序列,以挑选出返回的“光点”作为距离测量。在 FM 情况下,时间序列必须在测量期间进行缓冲,然后进行分析。存储数百或数千个时域样本,然后通过快速傅里叶变换转换到频域。然后在频域中搜索返回的“峰值”。
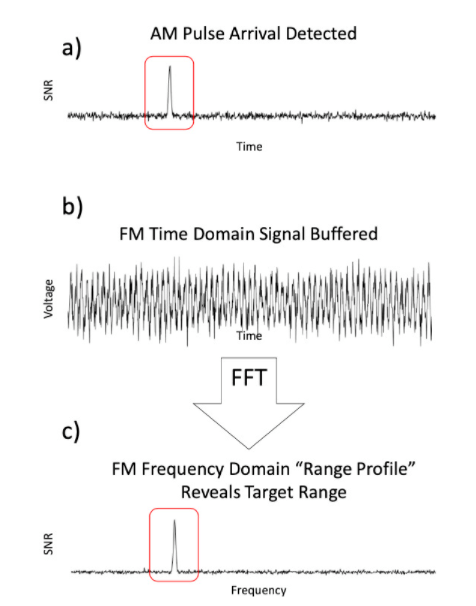
对 AM 系统的检测器信号进行串行分析,因为样本被数字化以检测输入脉冲。
在 FMCW 系统中,必须收集和缓冲时域样本。
FFT 揭示了 FMCW 时域样本的频率内容。然后分析该频域表示或“距离分布”以寻找表示目标距离和速度的峰值。
当来自任何激光雷达传感器(FM 或 AM)的激光束与移动物体相互作用时,目标和传感器之间的径向运动会在反射光上产生多普勒频移。AM 激光雷达的直接接收器测量反射脉冲,但不知道波长的微小变化。然而,在 FM 激光雷达的相干接收器中,这种多普勒频移表现为反射信号和 LO 之间的可测量频率差。因此,速度与点云中每个点的距离一起测量。这导致对具有微秒延迟的运动进行更自信的测量。AM 激光雷达系统必须处理多帧上的点云才能进行推断运动。这将噪声和延迟引入到运动估计中。虽然如上所述 FM 系统需要更多的前期信号处理,但对数据产品的后端处理较少,以使其对感知有用。推理被用来衡量。
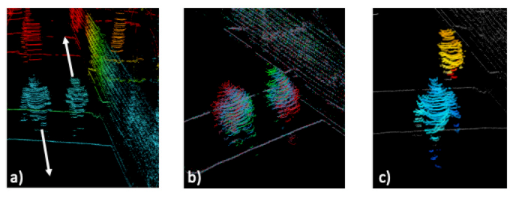
一组范围彩色点显示两个行人并排。红色较旧,绿色较新。
年龄颜色点的角度视图显示这些行人经过。行人的速度推导需要随着时间的推移比较点来推断运动。
单个 FM 激光雷达帧的多普勒彩色点显示每个数据点上的行人速度。描绘了四肢和躯干运动。
激光雷达中的干扰效应包括太阳能或其他背景照明源以及激光雷达到激光雷达的效应。虽然激光雷达对激光雷达的影响具有值得商榷的意义,但阳光对激光雷达的影响不能仅仅作为“角落案例”而被忽视。应考虑在阳光条件下始终如一地运行激光雷达。然而,采用直接检测的激光雷达传感器在暴露在阳光下时会受到检测器噪声升高的影响。光学带通滤波器提供了一些缓解,但是,在广角和宽温度范围内的窄带操作难以实现。一些阳光总是会到达光电探测器。在 AM 系统中,设计了高增益光电探测器对光敏感。这凸显了太阳背景会提高光电二极管上的噪声并限制范围性能的问题。
在 FM 系统中,太阳背景可以到达光电探测器。然而,太阳辐射与 LO 不相干。因此,该信号不会在感兴趣的 RF 频带内产生频率响应,以提取距离和速度测量值。相干检测过程可在没有光学滤光片的直射阳光下实现稳定的性能。打个比方,FM 系统“调谐”到一个非常窄的频道,不会“听到”其他广播电台。
如上所述,FM 信号等效于反射信号和 LO 电场的乘积。因此,更强的 LO 会产生更强的 FM 信号。这个过程是光放大的一种形式。这种能力的限制是由光电探测器上的 LO 驱动的“散粒噪声”或“量子波动”。散粒噪声受限的性能是单光子敏感。这在上述干扰抑制能力的背景下很重要。具有高选择性的高灵敏度允许以非常低的光发射功率实现远距离性能。由于高光功率,甚至是高峰值功率,对光子集成电路都是危险的,因此低功率能力可以实现 FM 激光雷达的芯片级集成。脉冲激光雷达系统,尤其是 1550nm 的激光雷达系统,有时在面对太阳干扰时利用大的光发射功率来实现远距离性能。这种功率是由昂贵的激光放大器产生的,这些放大器没有明显的芯片级等效物。相比之下,FM 激光雷达利用可以以半导体格式产生的发射光功率。
相干检测的“魔力”早已在国防部圈子中得到认可。然而,几十年来,密集的信号处理将实际应用限制为昂贵的防御程序或缓慢的离线应用程序。所需的数据吞吐量和处理确实很重要。然而,用于电信和雷达信号处理的 FPGA 的最新进展使低成本 FM 激光雷达能够用于自动驾驶感知。
每项激光雷达技术都面临挑战。但是 FM 激光雷达的处理要求以 AM 系统的硬件挑战换取了有界的信号处理要求。用软件增益代替硬件痛苦是一种强大的技术范式。
审核编辑:郭婷
-
FPGA
+关注
关注
1602文章
21320浏览量
593158 -
放大器
+关注
关注
142文章
12416浏览量
210006 -
激光雷达
+关注
关注
961文章
3654浏览量
186693
发布评论请先 登录
相关推荐
硅基片上激光雷达的测距原理

激光雷达与毫米波雷达的区别与联系
激光雷达测量技术与应用
一文通过AEC-Q102车规级芯片测试认证了解激光雷达核心技术及行业格局
激光雷达的基本构成 激光雷达由那些部分组成
补盲激光雷达,照亮自动驾驶隐秘的角落






 工商网监
工商网监
评论