 KUKA一套程序的建立(序列)
KUKA一套程序的建立(序列)

一套程序的建立(序列)
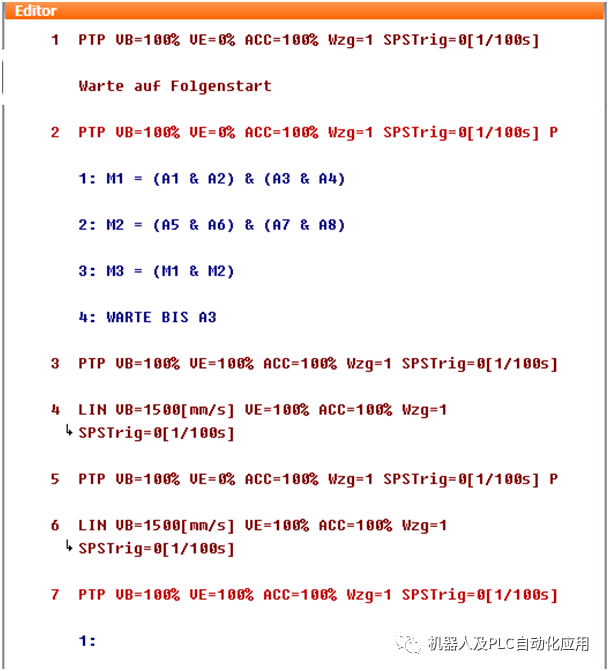
PTP 运动直至序列程序的 PF0 零点,即启动该序列程序的点。
等待程序启动
机器人控制系统等待上一级控制系统给出“程序启动”(SRB)的信号。在该信号给出后则启动此序列程序。
已打开的、带有PLC 指令的点焊 PLC。
| F | 点焊 PLC 包含有移动条件 FB ONL(仅当)。 |
| P | 点焊 PLC 包含有带有行编号的 PLC 指令。 |
| U | 在点焊 PLC 中将调用一个子程序 (通过行指令 UP)。 |
所有带行编号的PLC 指令均将在运动目标点处得以执行。可将其在时间上朝负向移动,以便在到达目标点之前能执行这些指令。为此必须在运动的行指令中对PLC 触发器进行相应的编程。 无行号的 PLC 指令可能位于编定行号的 PLC 指令之前或之后:
位于之前时,将在向目标点运动的过程中执行这些 PLC指令且与 PLC 触发器不同步。例如移动条件 FBONL、等待函数 WARTEONL或闭锁指令。
位于之后时,这些 PLC指令将在所有已编号的 PLC指令执行完毕后在目标点处执行。例如,调用一个子程序。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
plc
+关注
关注
5052文章
14929浏览量
489372 -
KUKA
+关注
关注
3文章
218浏览量
17532
原文标题:KUKA VVS 一套程序的建立(序列)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
一盒内存抵一套房!大厂锁货、小厂停摆,存储涨价撕裂产业链
电子发烧友网报道(文/莫婷婷)2026年初,“一盒内存条堪比上海一套房”的话题冲上热搜。据媒体报道,256GB DDR5服务器内存单条价格超过4万元,若一次性采购一盒100根,总价高达

非序列建模标准具和FABRY-PéROT谐振器
典型的应用,我们演示了用一个标准具作为关键元件的光路来检测钠D线。
用标准具研究钠D线
在VirtualLab Fusion中,建立了一套采用间隔硅标准具的光学测量系统来测量钠D线。进一
发表于 05-08 08:08
如何从零开始系统地建立一套BNC接口公母对照的识别体系?
面对BNC接口公母难辨的职场“翻车”现场,本文为工程师系统性地梳理了一套硬核识别体系。文章打破了仅看外壳的直觉误区,深度解析了“公头带针、母座带孔”的核心底层逻辑,并从50欧姆与75欧姆的细节差异

InverterTest 光储逆变器测试软件正式发布:200+测试工况,一套软件集中管理
本文导读致远仪器正式推出InverterTest光储逆变器测试软件,支持依据GB/T34133-2023等标准开展相关测试应用。软件将数据管理、结论判读、报告导出集中到一套软件中完成,帮助测试人员

从网络接口到 DMA,一套面向工程师的 FPGA 网络开发框架
在高性能网络、数据中心和智能网卡加速领域,硬件与软件协同设计已成为提升网络处理效率的关键。Liberouter 提供的 Network Development Kit(NDK) 就是这样一套专门用来

为什么原厂越来越需要一套自己的 Studio
成本持续升高
三、Studio 的本质,是把“正确用法”固化下来
一套原厂自己的 Studio,真正解决的并不只是“能不能配置”,而是:
哪些配置是推荐的
哪些组合是合理的
哪些情况应该被限制或提示
发表于 02-05 09:37
如何用一套驱动搞定不同尺寸屏幕的RGBWY灯光适配?
、调试周期长,效率大打折扣。针对这一多屏幕适配难题,我们近期在项目中实践了一套驱动设计方案,本文将分享具体实现思路与效果。01常见困扰尺寸切换即重调:从1.3寸屏切

如何使用SpringBoot、Vue2.0、MySQL开发一套云诊所系统?
如何使用Java语言;前端框架:Vue2.0;后端框架:SpringBoot;数 据 库: MySQL 这些技术开发一套云诊所系统? 技术栈分析: 后端:SpringBoot
SAW 滤波器从原理到测量:一套可复用的实验室实战流程
的实战测量流程。从测试治具、矢网校准到 S 参数与群时延的判读,给出一套可复用、可重复的 SAW 滤波器实验室测量方法,帮助工程师把 datasheet 上的“漂

如何搭建一套安防监控管理平台?
构建一套现代化的安防监控管理平台,本质上是建设一个集数据采集、传输、处理、存储、分析与应用于一体的综合型技术中枢。其技术架构需遵循模块化、高可用、可扩展及开放性的设计原则,具体可分为以下四个核心层

分支多、云也多,网络又慢又烧钱?一套方案全搞定!
、成本控制与运维效率的多重压力。面对这些挑战,是否有一套网络架构能够“全搞定”?答案是肯定的。基于行业实践与技术演进,我们逐渐形成了一套以SD-WAN+云网融合平台+
德思特案例 | 一套设备兼容四大测试场景:全面解析弱网测试方案
随着用户对网络体验要求的不断提升,弱网环境下的稳定性已不再是“加分项”,而是终端产品必须具备的“基本功”。德思特通过现网模拟 + 参数可控 + 自动化测试 + 创新硬件设计,为行业提供了一套完整、可复用、可扩展的弱网测试解决方案。




评论