 集度首款汽车机器人概念车发布,配备骁龙8295、英伟达Orin X芯片,31个车外传感器
集度首款汽车机器人概念车发布,配备骁龙8295、英伟达Orin X芯片,31个车外传感器

电子发烧友网报道(文/李弯弯)6月8日晚,集度首款汽车机器人概念车ROBO-01,在百度希壤元宇宙全球首发,第一款量产车将会在不久之后的广州车展亮相。在外观、内饰、功能设计上,概念车都将与未来的量产车有90%的重合度。

集度汽车成立于去年3月,由百度控股,2022年1月完成近4亿美元的A轮融资,由百度和战略合作伙伴吉利共同增持,2022年5月25日,由车型设计进入整车制造,集度实现“最大车身件成型技术”突破,启动首款车量产模具铸造。
取消门把手、车内复杂物理按键
集度的设计理念是未来主义、机器人化、共情。该公司认为,未来主义一定是极致简洁,车外去掉了门把手和其他繁复的设计,车舱内取消了复杂的物理按键,用户可以通过AI语音系统控制车辆的所有功能,另外车舱内还配备真正具有未来设计感的3D无界一体化大屏。

所谓机器人化就是让产品的感知能力变强,ROBO-01在多方面都体现出了机器人的主观能动性,比如主动升降式尾翼,采用电子控制,自动驾驶的时候,可以自动根据实时车速升降,低速行驶时,降低空气阻力优化续航,高速行驶时,可以为操控性提供车身下压力。

比如,将两颗激光雷达布置在车前机盖上,并采用跳灯式设计,这是集度首创。在自动驾驶或辅助功能启动时,激光雷达会自动升起,以获得180度FOV探测角度。
另外,出于对行人碰撞安全的考虑,在激光雷达支架处设计了主动退缩机制,一旦碰撞,传感器感受到碰撞信号,主动退缩支架会将激光雷达立刻收回,保护车外行人安全。
配备高通骁龙8295芯片
集度ROBO-01是高通骁龙第四代数字座舱芯片8295中国首发量产车型。8295芯片让智能座舱的AI算力达到30TOPS,作为高通首个量产5nm制程的车规级芯片,高通8295相比于上一代高通8155芯片,NPU算力是其7.5倍,GPU和CPU运算能力是其3.1倍和2.2倍。

因为受制于芯片算力,车载语音虽然诞生了很多年,但一遇到信号不好的时候,语音助手就会表现得很迟钝,而有了8295芯片,集度将语音识别的算法本地化,做到全离线语音,可以摆脱延时与信号的困扰,处理速度可以达到秒内响应,大大提升体验。
配备英伟达OrinX车规级芯片
安全可靠的自动驾驶,需要通过全域融通和场景泛化来实现。为了做到全域融通?ROBO-01全面继承百度Apollo的核心技术能力,并对其进行重新集成和验证开发,将其行业领先的无人驾驶技术,应用于消费级智能电动车。并基于百度Apollo,打造了集度高阶的自动驾驶智能体系。
为了让Apollo无人化自动驾驶算法,可以适配在量产车上,基于对产品的定义,集度为智驾配备了两块英伟达OrinX车规级芯片,支持自动驾驶的算力达到了508TOPS。希望通过英伟达orinX超强芯片性能,让Apollo的高阶AI能力落地,让算力和算法的能力匹配。

全车配备31个车外传感器
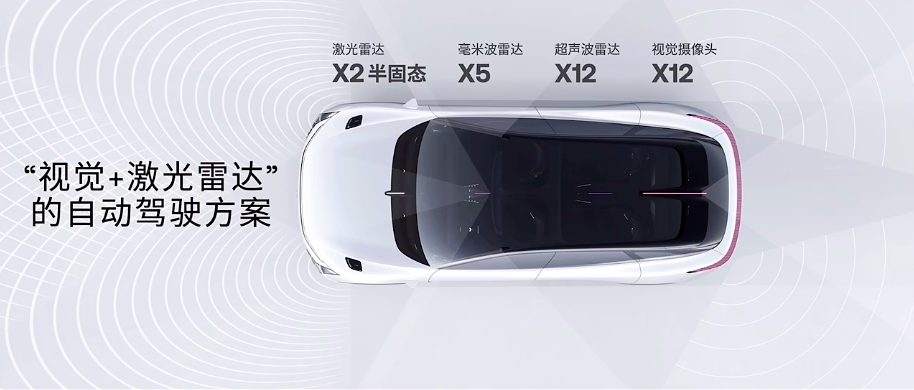
集度为全车配备了多达31个车外传感器,包括2个激光雷达,5个毫米波雷达,12个超声波雷达,和12个摄像头。在12个视觉摄像头中,有7是800W像素,4个300W像素和一个200W像素。通过视觉和激光雷达双系统智能驾驶解决方案,保证Apollo高阶自动驾驶能力的适配落地。
面向高阶自动驾驶的智能化架构
集度汽车还打造了JET平台,打造面向集度高阶自动驾驶的智能化架构,具备全域融通能力。面向开放平台的SOA架构,可以实现软件和硬件解耦,打破未来传统逻辑下软件升级或修改的低效,将一个功能迭代的周期,缩短三分之二左右。

为了更安全的自动驾驶,和智能座舱体验,集度率先打造了基于千兆以太网的冗余环形骨干网络,数据传输速率和效率都得到大幅提升。骨干网冗余设计可支持高阶自动驾驶的同时,充分提升车联网5G应用的落地体验。

结尾
围绕全域融通,场景泛化,集度打造了高阶自动驾驶的能力体系。在这个体系中,先进的算法需要更强大的算力匹配,进而需要有能够处理复杂算力带来的海量数据的智能化架构,而吞吐量变大的实时数据传输,又促进算法的优化迭代,用户体验也会在这样循环的过程提升。

-
机器人
+关注
关注
213文章
30590浏览量
219612 -
英伟达
+关注
关注
23文章
4040浏览量
97674 -
汽车
+关注
关注
15文章
4043浏览量
40623
发布评论请先 登录
揭晓英伟达最强芯片!Blackwell Ultra、Rubin芯片亮相,新机器人压轴
奥比中光营收暴增103%!英伟达全球生态的传感器合作伙伴!超10款自研传感器芯片流片

国内首款鸿蒙人形机器人亮相
科普 | 英伟达“最强”机器人大脑平台与5G物联网完成验证测试,RedCap支持人形机器人高效连接

最新发布!泰科机器人发布首款自研双足人形机器人

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
英伟达发布机器人 “新大脑”,黄仁勋:人形机器人三年普及
宇树科技预告新款人形机器人:有31个关节
工业机器人的特点
Made with KiCad(126):Antmicro OV5640 双摄像头子板
机器人Blue亮相 搭载英伟达最新GR00T N1人形机器人通用基础模型





 工商网监
工商网监
评论