 KUKA机器人带FDS拧紧设备的TCP校准应用
KUKA机器人带FDS拧紧设备的TCP校准应用

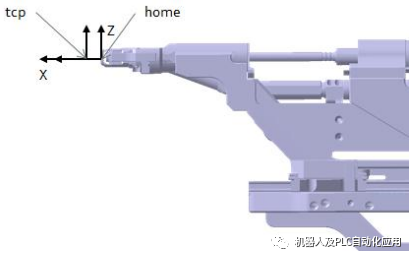
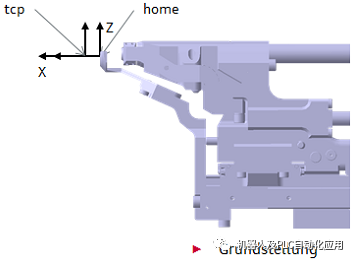
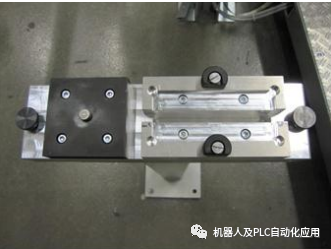
起始位置:
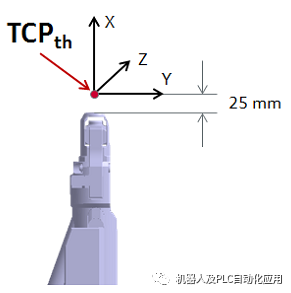
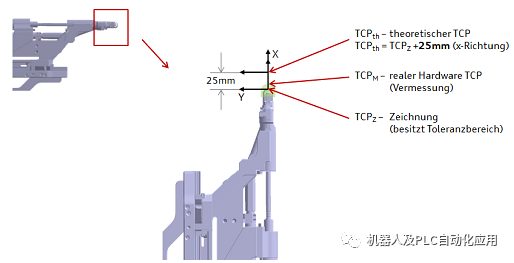
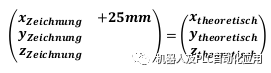
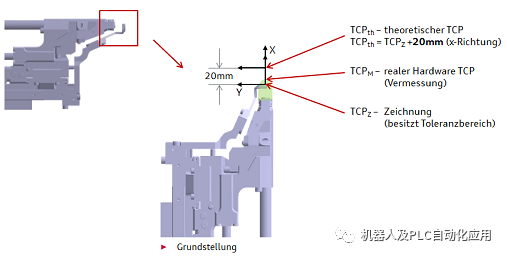
TCP理论:
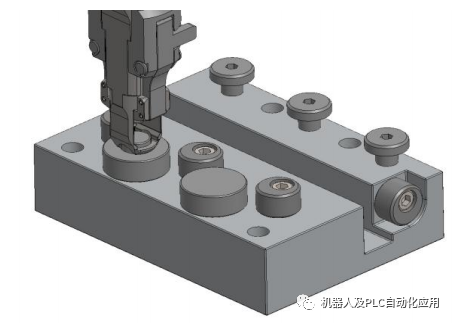
集成钟形螺丝刀测试单元:
机械要求:
创建一个坚固的支架(高度约 60 厘米)。根据系统规格,支架也可以设计不同。但是,组装应始终水平进行。
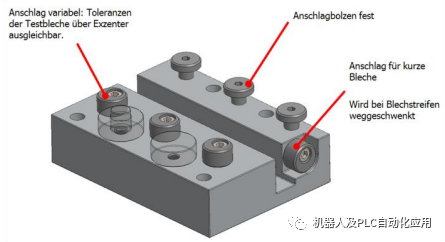
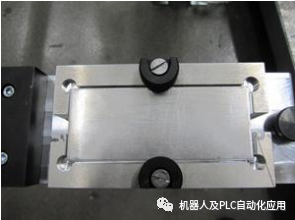
2. 将测试单元安装在支架上。将偏心轮设置为测试面板的宽度,必要时旋转止动块。
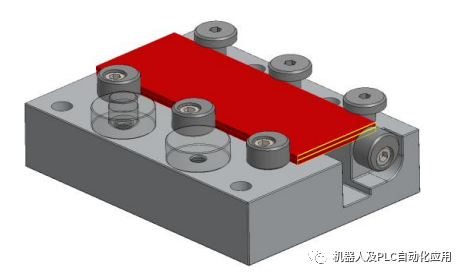
3. 插入托盘。设备准备好测试螺钉连接。

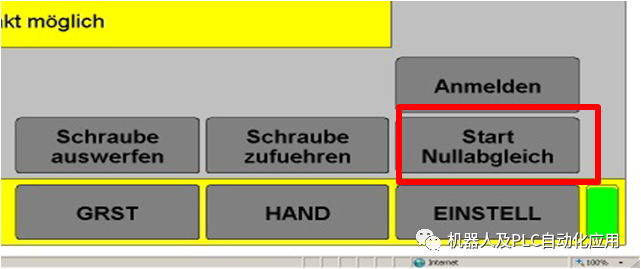
4.调整运行
- 将机器人放置在行驶区域上方以进行调整运行
- 触发调整运行
- 控件接受所选(停靠)工具的当前工具数据
5.检查TCP
- 将机器人放置在行驶区域上方以进行 TCP 测试
- 弹出螺丝
- 扩展压紧装置
- 目视检查压紧装置的窗口是否在行驶面上的螺栓中心,必要时进行修正
起始位置:
创建 UP 107 进行深度调整。
SPSMAKRO541 = EIN 喷钉
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=0 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: -- 开始进行深度校验 --
4: SPSMAKRO542 = EIN
5: WARTE BIS E23
6: A23 = EIN
UP - 名称:“平衡深度”
将螺钉头移动到测试单元的红色位置之一。
保存所选点上方 20mm 的位置。
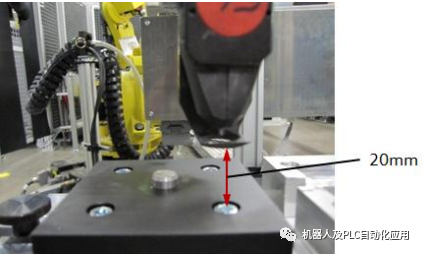
然后由处理装置执行实际的深度调整。起始位置可用作开始和结束位置。
2. 创建 UP 108 用于试拧。
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: WARTE BIS !E16 & E23
4: TECH3_ FDS Zange = Nr1 ProgNr = 5Fzg-Typ = 81 Weg = 0 [1/10 mm] PktNr_SPS = 5 EIN
5: SPSMAKRO540 = EIN拧紧
6: WARTE BIS E23
7: A23 = EIN
8: FB PSPS = M30 & M140 & E77 & E80
UP——名称:“试螺纹连接”
靠近第一个点20mm的距离拧紧,至于深度调节。然后发送到程序号 29(用于所有 4 个螺钉连接)并调用螺钉宏。测试表通常在螺丝刀的控制柜中。
3. 为快速检查 TCP 创建 UP 109。
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=0 SPSTrig=0[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: -- 喷钉--
4: SPSMAKRO541 = EIN
5: WARTE BIS E23
6: A23 = EIN
7: FB PSPS = M30 & M140 &F985
PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=0 SPSTrig=0[1/100s] P
1: FB PSPS = M30 & M140 & F985
-- TCP 位置 --
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=0 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: WARTE BIS E17
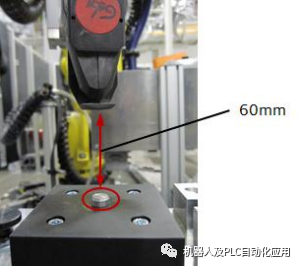
UP - 名称:“TCP 螺丝刀”
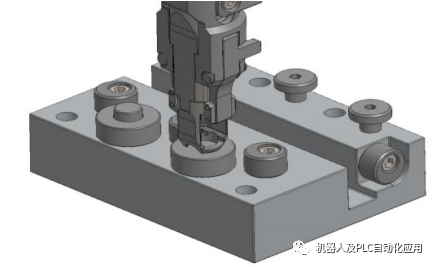
将带有固定板的螺丝刀插入底板的螺栓上并精确居中。然后在 X 方向上移动负 60mm 并接受这一点。以后检查 TCP 时,螺丝刀将被驱动到这个编程点。然后关闭螺丝刀的压缩空气。无压螺丝刀现在用手朝螺栓方向引导。
因此,可以在没有崩溃风险的情况下检查 TCP 的位置!
4. 创建 UP 110 进行精确测量。
UP - 名称:“测量螺丝刀”
所需的测试尖端安装在螺丝刀头上。必要的转换时间约为 5 分钟。
在内卡苏尔姆的 AUDI AG,测试探针不在现场,但在维护 D3/D4 期间必须在仓库中挑选。这与提款单一起记录。这在其他 AUDI AG 地点可能会有不同的处理方式。

两个尖端必须完全在彼此之上驱动,这一点被接管。无需进一步编程。
审核编辑 :李倩
-
TCP
+关注
关注
8文章
1418浏览量
83017 -
KUKA机器人
+关注
关注
4文章
144浏览量
9982
原文标题:KUKA机器人带FDS 拧紧设备的TCP校准应用
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
工业机器人的特点
开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例

盘点#机器人开发平台
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
EtherCAT转Modbus TCP:机器人产业的“语言”之困






 工商网监
工商网监
评论