 视觉成像技术帮助机器人和汽车看得更清楚
视觉成像技术帮助机器人和汽车看得更清楚

尽管机器人的眼睛没有视网膜,但帮助它们更自然、更安全地观察和与世界互动的关键是眼科医生办公室里常见的光学相干断层扫描(OCT)仪器。
许多机器人公司正在将一种成像技术集成到他们的传感器包中,即光探测和测距,简称LiDAR。目前,无人驾驶汽车开发商对该技术的关注和投资很大,该技术的工作原理与雷达类似,但它使用的是激光产生的短脉冲光,而不是发射宽带无线电波并探测反射信号。
然而,传统的time-of-flight激光雷达存在许多缺点,使其难以在许多3D视觉应用中使用。因为这需要探测非常微弱的反射光信号,对于目前大部分的激光雷达系统的探测器,信号甚至很容易淹没在环境光信号中。它的深度分辨率也很有限,在对高速公路或工厂车间等大片区域进行密集扫描,通常需要很长时间。为了应对这些挑战,研究人员正转向利用一种名为调频连续波(FMCW)激光雷达的系统。
“FMCW激光雷达与OCT具有相同的工作原理,生物医学工程领域自20世纪90年代初以来一直在发展OCT相关技术,”在杜克大学Michael J. Fitzpatrick生物医学工程杰出教授Joseph Izatt实验室工作的博士生Qian Ruobing说。“但30年前,没有人知道自动驾驶汽车或机器人会得到快速发展,所以OCT技术仅被用于组织成像。现在,为了让它在其他新兴领域发挥更大的作用,我们需要利用它超高的分辨率来获得更大的距离和速度。”
在3月29日发表在《Nature Communication》上的一篇论文中,杜克大学的团队展示了相关研究,他们在对OCT研究中学习到的一些方法,可以将之前的FMCW激光雷达数据吞吐量提高25倍,同时仍能实现亚毫米深度精度。
OCT是一种光学模拟超声波,它的工作原理是将声波发送到物体上,然后测量它们返回的时间。为了计算光波的返回时间,OCT设备测量了它们的相位与相同的光波相比移动了多少,这些光波经过相同的距离,但没有与另一个物体相互作用。
FMCW激光雷达采用了类似的方法,只是做了一些调整。 该技术发出的激光束在不同频率之间不断变换。 当探测器收集光来测量其反射时间时,它可以区分特定的频率模式和任何其他光源,这使得它可以在各种照明条件下高速工作。然后,它测量无阻碍光束下的任意相移,这是一种比目前的激光雷达系统更精确的确定距离的方法。
“看到我们几十年来研究的生物细胞规模的成像技术可以转化为大规模、实时的3D视觉技术,这是非常令人兴奋的,”Izatt说。“这正是机器人安全地观察人类并与人类互动所需要的能力,甚至在增强现实中,用实时3D视频取代虚拟化身。”
之前使用激光雷达的大部分工作都依赖于旋转镜子来扫描被反射的激光。虽然这种方法很有效,但无论它使用的激光有多强,它从根本上受到机械反射镜速度的限制。
杜克大学的研究人员使用的是一种衍射光栅,它的工作原理类似于棱镜,可以将激光分解成彩虹般的频率,当它们离开光源时就会散开。因为原始的激光仍然在快速地在一个频率范围内扫描,这意味着扫激光雷达光束的速度要比机械反射镜的旋转速度快得多。这使得系统能够在不损失深度和定位精度的情况下快速覆盖广泛的扫描区域。
虽然OCT设备是用于测量e物体内部几毫米深的微观结构的,但机器人3D视觉系统只需要定位人体尺度物体的表面。为了实现这一目标,研究人员缩小了OCT使用的频率范围,只寻找从物体表面反射产生的峰值信号。这使系统的分辨率降低了一点,但成像范围和速度比传统的激光雷达要大得多。
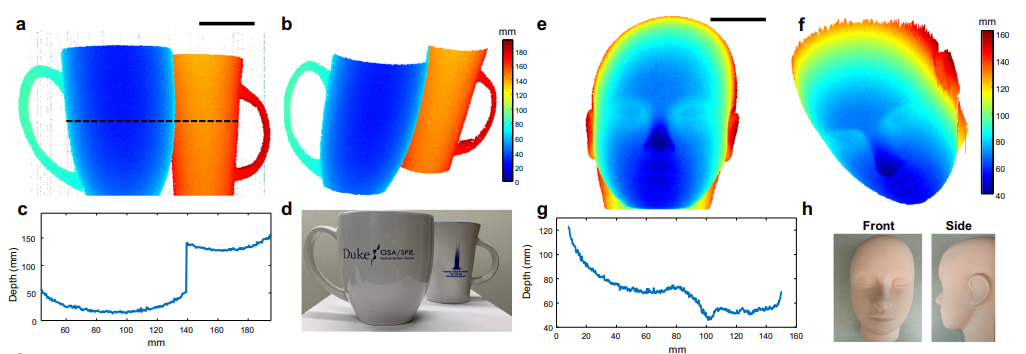
图1:真实世界物体的视频速率3D成像结果。a–d轴向间隔》9 cm的两个陶瓷咖啡杯的成像结果;e–h人体头部模型的成像结果
结果显示,FMCW激光雷达系统实现了亚毫米定位精度,数据吞吐量比之前的演示提高了25倍。结果表明,该方法足够快速和准确,可以实时捕捉到人体运动部位的细节,比如点头或握紧的手。
lzatt说:“就像数码相机已经无处不在一样,我们的愿景是开发新一代基于激光雷达的3D相机,这种相机速度快,功能强大,能够将3D视觉集成到各种产品中。”“我们周围的世界是3D的,所以如果我们想让机器人和其他自动化系统与我们自然而安全地互动,它们需要能够看到我们,就像我们可以看到它们一样。”
审核编辑 :李倩
-
机器人
+关注
关注
213文章
31444浏览量
223659 -
成像技术
+关注
关注
4文章
310浏览量
32265 -
激光雷达
+关注
关注
982文章
4548浏览量
197095
原文标题:视觉成像技术帮助机器人和汽车看得更清楚
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
智能机器人从0到1系统入门课程 带源码课件 百度网盘下载
NVIDIA 发布开放物理 AI 数据工厂 Blueprint,加速机器人、视觉 AI 智能体和智能汽车开发

3月赴沪!Vision China 2026(上海)邀你共探机器视觉与AI、机器人的融合未来
格物优信红外热成像技术在巡检机器人中的应用
CM8805EM迷你变焦摄像模组:解锁机器人视觉新高度
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
遨博机器人以 “更专业更智能” 破局,让机器人从工业走向生活
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
EtherCAT科普系列(8):EtherCAT技术在机器视觉领域的应用

【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
机器人和自动化的未来(2)




评论