 基于STM32实现简单的CAN通讯过程
基于STM32实现简单的CAN通讯过程

CAN通讯在车辆工程中用的非常广泛,本文将基于stm32实现简单的can通讯过程。
首先了解一下CAN通讯的主要特点:
1、 数据通信没有主从之分,任意一个节点可以向任何其他(一个或多个)节点发起数据通信,靠各个节点信息优先级先后顺序来决定通信次序。
2、 支持时间触发通信功能, 发送报文的优先级可软件配置。多个节点同时发起通信时,优先级低的避让优先级高的,不会对通信线路造成拥塞。
3、 CAN 是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。通信距离最远可达10KM(速率低于5Kbps),速率可达到1Mbps(通信距离小于40M)。
4、 CAN 总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信的特点。
5、 FIFO(First Input First Output),即先进先出队列,溢出处理方式可配置
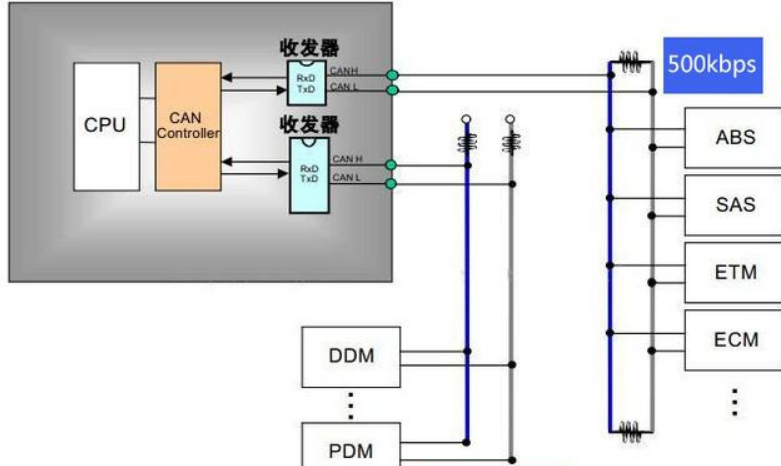 can通讯拓扑结构
can通讯拓扑结构下面我们将根据stm32 嵌入式系统
话不多说,直接上代码:
can.h代码如下:
#ifndef __CAN_H
#define __CAN_H
#include "sys.h"
//CAN接收RX0中断使能
#define CAN_RX0_INT_ENABLE 1 //0,不使能;1,使能.
u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode);//CAN初始化
u8 Can_Send_Msg(u8* msg,u8 len); //发送数据
u8 Can_Receive_Msg(u8 *buf); //接收数据
#endif
can.c代码如下:
#include "can.h"
#include "led.h"
#include "delay.h"
#include "usart.h"
//CAN初始化
//tsjw:重新同步跳跃时间单元.范围:CAN_SJW_1tq~ CAN_SJW_4tq
//tbs2:时间段2的时间单元. 范围:CAN_BS2_1tq~CAN_BS2_8tq;
//tbs1:时间段1的时间单元. 范围:CAN_BS1_1tq ~CAN_BS1_16tq
//brp :波特率分频器.范围:1~1024; tq=(brp)*tpclk1
//波特率=Fpclk1/((tbs1+1+tbs2+1+1)*brp);
//mode:CAN_Mode_Normal,普通模式;CAN_Mode_LoopBack,回环模式;
//Fpclk1的时钟在初始化的时候设置为36M,如果设置CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_8tq,CAN_BS1_9tq,4,CAN_Mode_LoopBack);
//则波特率为:36M/((8+9+1)*4)=500Kbps
//返回值:0,初始化OK;
// 其他,初始化失败;
u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode)
{
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
#if CAN_RX0_INT_ENABLE
NVIC_InitTypeDef NVIC_InitStructure;
#endif
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PORTA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
//CAN单元设置
CAN_InitStructure.CAN_TTCM=DISABLE; //非时间触发通信模式
CAN_InitStructure.CAN_ABOM=DISABLE; //软件自动离线管理
CAN_InitStructure.CAN_AWUM=DISABLE; //睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位)
CAN_InitStructure.CAN_NART=ENABLE; //禁止报文自动传送
CAN_InitStructure.CAN_RFLM=DISABLE; //报文不锁定,新的覆盖旧的
CAN_InitStructure.CAN_TXFP=DISABLE; //优先级由报文标识符决定
CAN_InitStructure.CAN_Mode= mode; //模式设置: mode:0,普通模式;1,回环模式;
//设置波特率
CAN_InitStructure.CAN_SJW=tsjw; //重新同步跳跃宽度(Tsjw)为tsjw+1个时间单位 CAN_SJW_1tq CAN_SJW_2tq CAN_SJW_3tq CAN_SJW_4tq
CAN_InitStructure.CAN_BS1=tbs1; //Tbs1=tbs1+1个时间单位CAN_BS1_1tq ~CAN_BS1_16tq
CAN_InitStructure.CAN_BS2=tbs2; //Tbs2=tbs2+1个时间单位CAN_BS2_1tq ~ CAN_BS2_8tq
CAN_InitStructure.CAN_Prescaler=brp; //分频系数(Fdiv)为brp+1
CAN_Init(CAN1, &CAN_InitStructure); //初始化CAN1
CAN_FilterInitStructure.CAN_FilterNumber=0; //过滤器0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; //屏蔽位模式
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32位宽
CAN_FilterInitStructure.CAN_FilterIdHigh=0x18F1; //32位ID
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32位MASK
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//过滤器0关联到FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;//激活过滤器0
CAN_FilterInit(&CAN_FilterInitStructure); //滤波器初始化
#if CAN_RX0_INT_ENABLE
CAN_ITConfig(CAN1,CAN_IT_FMP0,ENABLE); //FIFO0消息挂号中断允许.
NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 主优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 次优先级为0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
#endif
return 0;
}
#if CAN_RX0_INT_ENABLE //使能RX0中断
//中断服务函数
void USB_LP_CAN1_RX0_IRQHandler(void)
{
CanRxMsg RxMessage;
int i=0;
CAN_Receive(CAN1, 0, &RxMessage);
for(i=0;i<8;i++)
printf("rxbuf[%d]:%d\r\n",i,RxMessage.Data[i]);
}
#endif
//can发送一组数据(固定格式:ID为0X12,标准帧,数据帧)
//len:数据长度(最大为8)
//msg:数据指针,最大为8个字节.
//返回值:0,成功;
// 其他,失败;
u8 Can_Send_Msg(u8* msg,u8 len)
{
u8 mbox;
u16 i=0;
CanTxMsg TxMessage;
TxMessage.StdId=0x123; // 标准标识符
TxMessage.ExtId=0x18f10155; // 设置扩展标示符 ID
TxMessage.IDE=CAN_Id_Extended; // 扩展帧CAN_Id_Extended 标准帧CAN_Id_Standard
TxMessage.RTR=CAN_RTR_Data; // 数据帧
TxMessage.DLC=len; // 要发送的数据长度
for(i=0;i=0XFFF)return 1;
return 0;
}
//can口接收数据查询
//buf:数据缓存区;
//返回值:0,无数据被收到;
// 其他,接收的数据长度;
u8 Can_Receive_Msg(u8 *buf)
{
u32 i;
CanRxMsg RxMessage;
if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0; //没有接收到数据,直接退出
CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//读取数据
for(i=0;i<8;i++)
buf[i]=RxMessage.Data[i];
return RxMessage.DLC;
};i++)>
所用的函数为标准库函数,需要更换引脚需要根据相关的芯片手册进行配置相关的引脚,这里也不做赘述,后面会讲到如何根据数据手册看芯片资料。只要配置好这两个函数就可以完成数据发送和接收。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAN
+关注
关注
59文章
3097浏览量
473552 -
通讯
+关注
关注
9文章
952浏览量
36643 -
总线
+关注
关注
10文章
3061浏览量
91881
发布评论请先 登录
相关推荐
热点推荐
CAN 转 ModbusRTU 网关 十大通讯故障排查与解决指南
、智能楼宇等多个领域。实际现场部署与使用过程中,受参数配置、线路接线、工业环境干扰、设备兼容等因素影响,易出现各类通讯异常问题。为助力现场工程师快速定位故障、高效解决问题,保障工业通讯链路的稳定运行,本文整理了该类网关最常见的十

新品发布 | GW2208/GW2212:基于以太网通讯的高性能 CAN/CAN FD 智能网关设备
继GW2202/GW2204之后,同星智能再度扩充“GW系列”家族版图,正式推出GW2208(8通道)与GW2212(12通道)两款基于以太网的高性能CAN/CAN FD智能网关。这不仅实现了通道数的倍增,更是针对复杂车载与工业

CAN转ModbusRTU 网关 十大通讯故障排查手册
多个领域。实际现场部署与使用过程中,受参数配置、线路接线、工业环境干扰、设备兼容等因素影响,易出现各类通讯异常问题。为助力现场工程师快速定位故障、高效解决问题,保障工业通讯链路的稳定运行,本文整理了该类网关最常见的十大
瑞萨RA系列FSP库开发实战指南之I2C通讯协议的物理层和协议层简介
I2C通讯协议(Inter-Integrated Circuit)是由 Philips公司开发的,由于它引脚少,硬件实现简单,可扩展性强,不需要USART、CAN等
远创智控网关赋能工业互联:基恩士 PLC 与 CAN IO 卡跨协议通讯实践
面临三大核心技术瓶颈: (一)协议兼容性障碍 基恩士 PLC 采用 EtherNet/IP 协议进行数据传输,而现场 IO 卡均基于 CAN 总线协议设计。两种协议在数据帧结构、传输机制及地址映射逻辑上存在本质差异,导致设备间直接通讯完全无法

PXB-6020(D):让CAN通讯更灵活,Modbus接入更简单
在现代工业和储能系统中,CAN通讯接口数量有限,常常限制了系统的扩展和设备接入。如何在不增加成本的情况下,实现更多设备的灵活接入?本文将介绍一款高效、可靠的解决方案,轻松解决接口瓶颈问题。背景在

EtherNet/IP转CAN协议转换网关实现基恩士PLC与CAN协议的IO卡通讯的配置案例
EtherNet/IP 对 4 组进口CAN总线 IO 卡(德国 Helmholz CAN-IO-32 系列,每卡 32 点,共 128 点混合 I/O)进行实时 数据交互 ,实现液压夹紧、真空
AT32F系列 CAN通讯模式使用
AT32F系列 CAN通讯模式使用本帖子演示AT32F系列_CAN通讯模式的使用方法。注:本应用笔记对应的代码是基于雅特力提供的V2.x.x 板级支持包(BSP)而开发,对于其他版本B
发表于 10-20 16:29
基恩士PLC通过EtherNet/IP转CAN网关实现与CAN IO模块的通信方案
核心痛点: 首先是 协议兼容性障碍 。基恩士PLC采用 EtherNet/IP协议 进行数据传输,而现场IO卡均基于CAN总线协议设计,两种协议在数据帧结构、传输机制和地址映射方式上存在本质差异,导致直接通讯无法实现。这种"语言
CAN 接口的“老炮”本色:ARMxy BL410 工业通讯全攻略
深圳市钡铼技术有限公司ARMxy系列BL410控制器,内置工业级CAN接口,支持多节点广播、强抗干扰与高实时性,适用于储能系统BMS、AGV、变频器组网等复杂环境。配合RS485、LAN等多接口组合,实现设备到云的稳定高速通讯。
6轴步进电机驱动+STM32F767+485+CAN+网口+12输入输出原理图
6轴步进电机驱动+STM32F767+485+CAN+网口+12路输入输出 原理图 步进电机驱动方案TMC5160
发表于 06-27 16:18
•1次下载
如何解决CAN通讯故障?原因分析与解决方法全攻略
在日常工作中,我们经常收到客户的反馈,他们表示CAN卡无法正常通讯,这给工作带来了诸多不便。今天,就让我们深入探讨一下导致CAN卡通讯失败的常见原因,以及相应的解决方法。单个
Profinet转CAN网关模块对实现西门子PLC与CAN变频器协同通信的助力研究
在智能物流仓储系统中,AGV等设备的通讯网络稳定性和实时性至关重要。通过Profinet转CAN网关,可以实现中控系统(如西门子PLC,支持ProFiNet协议)与伺服驱动器(支持CAN




评论