 TI eSMO库Fsmopos和Gsmopos参数解析
TI eSMO库Fsmopos和Gsmopos参数解析

作者:Hardy Zhou
在电机无感控制算法方面,TI提供了eSMO滑模观测器来计算电机转子角度。 在应用方面,TI提供了eSMO lib文件和相关文档说明eSMO的使用,但是在使用过程中,可能没法从相关文档上理解Fsmopos和Gsmopos的含义,不方便调试。 因此本篇主要推导 TI eSMO电流计算公式,并导出Fsmopos和Gsmopos(分别简称F和G)公式,同时我们可以从推导出的公式看到TI 的计算和其他F和G的计算方式的差别,加深理解和熟练应用。
PMSM在静止α、β坐标系下的数学模型如下:
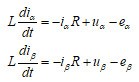 (1)
(1)
TI eSMO滑模观测器结构数学模型如下
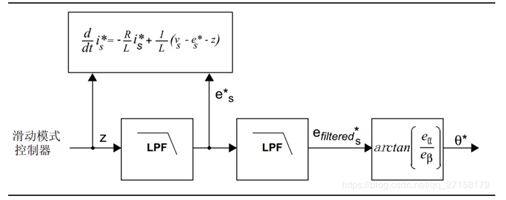
从结构上看,比较清晰明了,使用开关切换函数估算反电动势,从而求得电机转子角度。
从而我们可以得到以下的观测器表达式
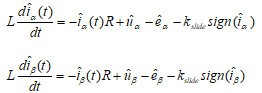
其中
基于以上公式,我们在α轴上求解eSMO电流,类似地可以求得β轴电流公式。

电流在时域下的解为:
对应离散时间Ts的电流解为
 (1)
(1)
从而得到:
 (2)
(2)
(2) – (1)得到
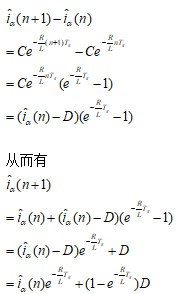
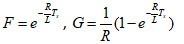
从而可以得到
注意: 如果离散时间Ts足够小,可以使用 近似。
近似。
那么就有
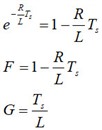
这样就跟其他非指数形式的表达式一样。
审核编辑:金巧
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式处理
+关注
关注
0文章
341浏览量
10558 -
电机
+关注
关注
145文章
9743浏览量
155026
发布评论请先 登录
相关推荐
热点推荐
电机参数测量全解析
电机参数测量全解析 在电机的设计、应用与维护过程中,准确测量电机的各项参数至关重要。今天,我们就来详细探讨如何测量电机的关键参数,以 EVAL_100W_DRIVE_CFD2 为例,为
3 1/2 位 LCD 玻璃的设计参数与特性解析
3 1/2 位 LCD 玻璃的设计参数与特性解析 在电子设备的显示领域,LCD 玻璃扮演着至关重要的角色。今天我们就来详细解析一款 0.50 字符高度、3 1/2 位的 LCD 玻璃的设计参数
【米尔TI AM62L开发板试用】+数据库操作及功能测试
没想到的是在TI AM62L开发板上也提供了数据库的功能,其选取版本是SQLite3,它是一款轻型的数据库,所遵守的是关系型数据库管理系统,具有占用资源低的特点,所移植的版本为3.45
发表于 05-11 11:31
深入解析NTMFS4925NE Power MOSFET:特性、参数与应用
深入解析NTMFS4925NE Power MOSFET:特性、参数与应用 在电子设计领域,MOSFET(金属 - 氧化物 - 半导体场效应晶体管)是不可或缺的关键元件,广泛应用于各种电源管理和功率

cJSON库是什么?
cJSON库是什么?cJSON是一个轻量级的json解析库。使用起来非常简单,整个库非常地简洁,核心功能的实现都在cJSON.c文件,非常适合阅读源代码来学习C语言。最近读完这个
发表于 01-29 07:13
深入解析SN74CBTD1G125单FET总线开关:特性、参数与应用考量
深入解析SN74CBTD1G125单FET总线开关:特性、参数与应用考量 在众多电子设备中,总线开关扮演着至关重要的角色,能够实现信号的高效传输与切换。TI推出的SN74CBTD1G125单FET
TI TS12A4514/TS12A4515单刀单掷CMOS模拟开关:特性、参数与应用解析
TI TS12A4514/TS12A4515单刀单掷CMOS模拟开关:特性、参数与应用解析 在电子工程师的日常工作中,模拟开关是我们经常会用到的器件之一。今天就来详细解析德州仪器(
TI 23 - mm 低频玻璃封装只读应答器:TRPGR30ATGA 深度解析
TI 23 - mm 低频玻璃封装只读应答器:TRPGR30ATGA 深度解析 在电子设计领域,低频应答器是车辆识别、资产追踪等应用的重要组件。今天,我们将深入剖析德州仪器(TI)的 23 - mm
TI PCI2040:PCI - DSP桥接器的深度解析
TI PCI2040:PCI - DSP桥接器的深度解析 在电子设计领域,桥接器扮演着至关重要的角色,它能够实现不同接口之间的无缝连接,提升系统的整体性能。TI的PCI2040作为一款PCI
DLPC1438:TI DLP® 3D 打印机数字控制器的全面解析
DLPC1438:TI DLP® 3D 打印机数字控制器的全面解析 在 3D 打印技术蓬勃发展的今天,一款优秀的数字控制器对于实现高质量、高分辨率的 3D 打印至关重要。TI 的 DLPC1438
Labview 解析dxf文件并显示<一>
的文本格式,可以参考下面地址里面的介绍,介绍了CAD里面遇到的各种图形单元的文本编辑格式,我们以此来解析出图形参数,用该图像参数,咱们再将图形绘制到XY Graph 中,当然也可以绘制图像到IMG或者
发表于 11-14 22:45
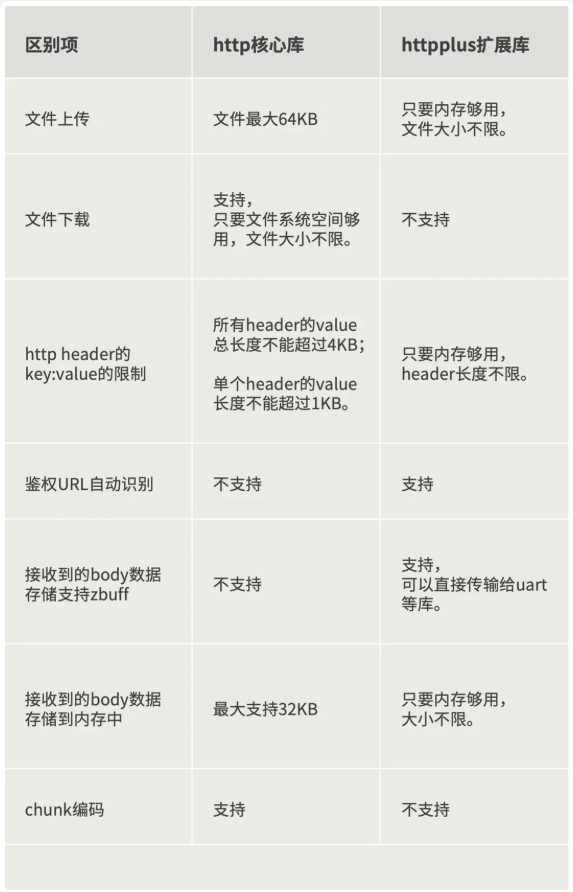
HTTP开发必备:核心库与httpplus扩展库应用示例全攻略
HTTP开发的必备参考!本文汇总核心库基础操作与httpplus扩展库高级特性,通过示例解析,让你快速上手各类HTTP开发需求。
数据库数据恢复—服务器异常断电导致Oracle数据库故障的数据恢复案例
备份,仅有一些断断续续的归档日志。
Oracle数据库恢复流程:
1、检测数据库故障情况;
2、尝试挂起并修复数据库;
3、解析数据库



评论