 跑马灯是什么 如何用HFSS来跑马灯
跑马灯是什么 如何用HFSS来跑马灯

学个Antenna是以天线仿真和调试为主,理论原理为辅的干货天线技术专栏,包括天线入门知识以及各类天线的原理简介、仿真软件建模、设计、调试过程及思路。如有想看到的内容或技术问题,可以在文尾写下留言。
摘要:
经过前面两期的教学HFSS-API入门第一弹,第二弹,已经可以完成部分常规的建模需求。本期整点好玩的,用HFSS来跑马灯。欢迎小伙伴们阅读、分享、再看,转发给更多有需要的人!喜欢的小伙伴可赞赏下作者哦。
本文使用的软件为MATLAB2019a和AnsysEM 18.2
0 1简单介绍
常规的跑马灯,是指将多个发光二极管分别连接到单片机的某一并行端口处,通过编程控制这几个发光二极管依次点亮。
在HFSS-API入门第一弹:画个Box中对hfssBox函数的使用进行了详细介绍,如果再加上修改Box的颜色的透明度,加上延时操作,就可以利用MATLAB编写vbs脚本,在HFSS中Run Script实现“跑马灯”效果。
0 2修改颜色和透明度函数
接下来先介绍修改物体颜色和透明度的函数:hfssSetColor,hfssSetTransparency。
% hfssSetColor(fid, ObjectName, Color)% ObjectName:需要修改颜色的物体对应的名字.% Color:RGB三色值.% 实例:% hfssSetColor(fid, ‘Box1’, [255, 255, 0]);
% hfssSetTransparency(fid, ObjectName, Value)% ObjectName:需要修改颜色的物体对应的名字.% Value:透明度值,在0到1之间;0代表完全不透明,1代表完全透明.% 实例:% hfssSetTransparency(fid,‘Box1’, 0)
这两个函数的使用自然是很简单。压缩的GIF动图预览如下:
那么这个效果是如何实现的呢?
新建工程,新建设计文件,定义变量,画Box,这四个常规步骤是很容易做到的,hfssSetColor和hfssSetTransparency这两个函数也可以对物体的颜色和透明度进行二次修改。剩下需要做的就是在vbs中进行延时,以及控制鼠标左键在非模型区域点击一下,使得物体不处于高亮状态,便于观察变色效果。
首先需要解决的延时问题,网络上随手搜索关键词vbs延时函数,可以找到wscript.sleep这个函数用法:
用法:Times为延迟时间(单位:毫秒)wscript.sleep Times
新建一个txt文件,将后缀改为vbs,然后用记事本打开复制粘贴下面代码:
wscript.sleep 1000msgbox(“Hello”)wscript.sleep 1000msgbox(“This World!”)
单独运行时正常可用的。
说明HFSS的vbs脚本中不支持该函数方法,联想到单片机中的delay函数都是自己写的,于是也在MATLAB里手撸了一个大概的延时函数:
% 延时函数的编写fprintf(fid, ‘Sub delay(ms)
’);fprintf(fid, ‘ Dim i,value
’);fprintf(fid, ‘ for i=1 to 7500*ms
’);fprintf(fid, ‘ value=i+1
’);fprintf(fid, ‘ next
’);fprintf(fid, ‘End Sub
’);
然后我们需要解决vbs脚本中控制鼠标左键点击的需求,这里也是一样百度关键词vbs模拟鼠标按键,找到下面的网站:
https://www.cnblogs.com/jinjiangongzuoshi/p/3821375.html
经过拆解分析后,转化为自己可使用的封装代码。
Class SetMouseprivate Sprivate xls, wbk, module1private reg_key, xls_code, x, yPrivate Sub Class_Initialize() Set xls = CreateObject(“Excel.Application”) Set S = CreateObject(“wscript.Shell”) reg_key = “HKEY_CURRENT_USER\Software\Microsoft\Office\$\Excel\Security\AccessVBOM” reg_key = Replace(reg_key, “$”, xls.Version) S.RegWrite reg_key, 1, “REG_DWORD” xls_code = _ “Private Type POINTAPI : X As Long : Y As Long : End Type” & vbCrLf & _ “Private Declare Function SetCursorPos Lib ”“user32”“ (ByVal x As Long, ByVal y As Long) As Long” & vbCrLf & _ “Private Declare Function GetCursorPos Lib ”“user32”“ (lpPoint As POINTAPI) As Long” & vbCrLf & _ “Private Declare Sub mouse_event Lib ”“user32”“ Alias ”“mouse_event”“ ” _ & “(ByVal dwFlags As Long, ByVal dx As Long, ByVal dy As Long, ByVal cButtons As Long, ByVal dwExtraInfo As Long)” & vbCrLf & _ “Public Function getx() As Long” & vbCrLf & _ “Dim pt As POINTAPI : GetCursorPos pt : getx = pt.X” & vbCrLf & _ “End Function” & vbCrLf & _ “Public Function gety() As Long” & vbCrLf & _ “Dim pt As POINTAPI: GetCursorPos pt : gety = pt.Y” & vbCrLf & _ “End Function” Set wbk = xls.Workbooks.Add Set module1 = wbk.VBProject.VBComponents.Add(1) module1.CodeModule.AddFromString xls_codeEnd SubPrivate Sub Class_Terminate xls.DisplayAlerts = False wbk.Close xls.QuitEnd SubPublic Sub getpos( x, y) x = xls.Run(“getx”) y = xls.Run(“gety”)End SubPublic Sub move(x,y) xls.Run “SetCursorPos”, x, yEnd SubPublic Sub clik(keydown) Select Case UCase(keydown) Case “LEFT” xls.Run “mouse_event”, &H2 + &H4, 0, 0, 0, 0 Case “RIGHT” xls.Run “mouse_event”, &H8 + &H10, 0, 0, 0, 0 Case “MIDDLE” xls.Run “mouse_event”, &H20 + &H40, 0, 0, 0, 0 Case “DBCLICK” xls.Run “mouse_event”, &H2 + &H4, 0, 0, 0, 0 xls.Run “mouse_event”, &H2 + &H4, 0, 0, 0, 0 End SelectEnd SubEnd Class
由于这段代码过长,直接在MATLAB中用fprintf写入到vbs脚本得一行一行处理,于是将其单独复制到一个mouse_control.txt文件里,通过MATLAB的读写文件操作,将这段代码追加写入到vbs脚本文末,作为可调用的函数进程。
上面代码第8行之所以是双斜杠,是为了将单斜杠写入到vbs脚本中。
reg_key = “HKEY_CURRENT_USER\Software\Microsoft\Office\$\Excel\Security\AccessVBOM”
有了上面的代码后,鼠标点的移动和左键点击事件可以在MATLAB中写入:
fprintf(fid, ‘Set mouse=New SetMouse
’);fprintf(fid, ‘% move后面是电脑鼠标需要移动的坐标点,通过mousexy确定坐标点fprintf(fid, ’mouse.move 1678,575
‘);fprintf(fid, ’delay(500)
‘);fprintf(fid, ’mouse.clik “dbclick”
‘);fprintf(fid, ’delay(500)
‘);fprintf(fid, ’
‘);
用MATLAB进行整体的vbs脚本写入,整段代码如下所示,可在文末下载链接下载。
clear;clc;path = mfilename(’fullpath‘);i=strfind(path,’‘);path=path(1:i(end));cd(path);addpath(genpath(strcat(path,’hfssapi-by-Jianhui Huang‘)));try % 填写路径 % tmpPrjFile:生成的aedt或者hfss(安装hfss15以下的后缀名为.hfss)项目文件的路径名 % tmpScriptFile:生成的vbs脚本文件的路径名 tmpPrjFile = ’F:vbsScripthorse_race_lamp.aedt‘; tmpScriptFile = ’F:vbsScriptauto_code.vbs‘;
% hfssExePath:HFSS软件的路径 hfssExePath = ’D:softwareHFSS15AnsysEM18.2Win64ansysedt.exe‘;
% 创建一个可读写vbs脚本文件。 fid = fopen(tmpScriptFile, ’wt‘);
%创建一个新的HFSS项目并插入一个新的设计文件。 hfssNewProject(fid); Design_name=’example‘; hfssInsertDesign(fid, Design_name); Box_W=1;Box_L=1;Box_H=1; % hfssVariableInsert(fid,DesignName,variableName, value, units,flag) hfssVariableInsert(fid,Design_name,’Box_W‘, Box_W, ’mm‘,1); hfssVariableInsert(fid,Design_name,’Box_L‘, Box_L, ’mm‘,1); hfssVariableInsert(fid,Design_name,’Box_H‘, Box_H, ’mm‘,1); % 画Box % hfssBox(fid, BoxName, Start, Size, Units, Color, Material, Transparency, flag) hfssBox(fid, ’Box1‘, {’-Box_W/2‘, ’-Box_L/2‘, ’0mm‘}, {’Box_W‘, ’Box_L‘, ’Box_H‘}, ’mm‘,。。。 “(0 128 128)”, “Rogers RO4350 (tm)”, 0, 2); % 点击鼠标左键 fprintf(fid, ’
‘); fprintf(fid, ’Set mouse=New SetMouse
‘); fprintf(fid, ’mouse.getpos x,y
‘); fprintf(fid, ’mouse.move 1678,575
‘); fprintf(fid, ’delay(500)
‘); fprintf(fid, ’mouse.clik “dbclick”
‘); fprintf(fid, ’delay(500)
‘); fprintf(fid, ’
‘); % 跑马灯 for num=0:20 hfssSetColor(fid, ’Box1‘, [randi(255,1), randi(255,1), randi(255,1)]); fprintf(fid, ’delay(100)
‘); end % 保存项目文件到指定路径 hfssSaveProject(fid, tmpPrjFile,1); % 延时函数的编写 fprintf(fid, ’Sub delay(ms)
‘); fprintf(fid, ’ Dim i,value
‘); fprintf(fid, ’ for i=1 to 7500*ms
‘); fprintf(fid, ’ value=i+1
‘); fprintf(fid, ’ next
‘); fprintf(fid, ’End Sub
‘); % 鼠标控制 fid1=fopen(’mouse_control.txt‘); %打开文本文件 INDEX=0; while ~feof(fid1) strdata = fgetl(fid1); % 读取一行, strdata是字符串 fprintf(fid, strdata); fprintf(fid, ’
‘); end fclose(fid1); % Close the HFSS Script File. fclose(fid); disp(’vbs脚本已生成!‘);catch disp(’程序出现异常!‘); fclose(fid);end
按个人情况按图索骥地修改tmpPrjFile,tmpScriptFile ,hfssExePath这几个路径和Design_name,使用的时候记得将mouse_control.txt和该vbs_horse_race_lamp.m文件单独拎出来,与hfssapi-by-Jianhui Huang放在同一个总文件夹内。点击运行即可生成vbs脚本(在自行赋值的tmpScriptFile的这个路径下)。vbs脚本可以直接点击运行,或者在HFSS软件中Run Script。
基础性地写代码编注释还是挺费时间和精力的,希望大家多点赞分享。
编辑:jq
-
仿真
+关注
关注
55文章
4568浏览量
138821 -
API
+关注
关注
2文章
2506浏览量
67138 -
函数
+关注
关注
3文章
4423浏览量
68043 -
hfss
+关注
关注
33文章
168浏览量
51884
发布评论请先 登录
【「玩转高速电路:基于ANSYS HFSS的无源仿真实例」阅读体验】+基础篇
HFSS仿真铌酸锂电光调制器T型电极损耗较大
如何用FPGA控制ADV7513实现HDMI画面显示和音频播放

【瑞萨RA6E2】驱动 WS2812 实现 RGB 跑马灯效果
【书籍评测活动NO.66】玩转高速电路:基于ANSYS HFSS的无源仿真实例
如何用FPGA实现4K视频的输入输出与处理

【RA4M2-SENSOR】 Keil开发环境建立和跑马灯运行
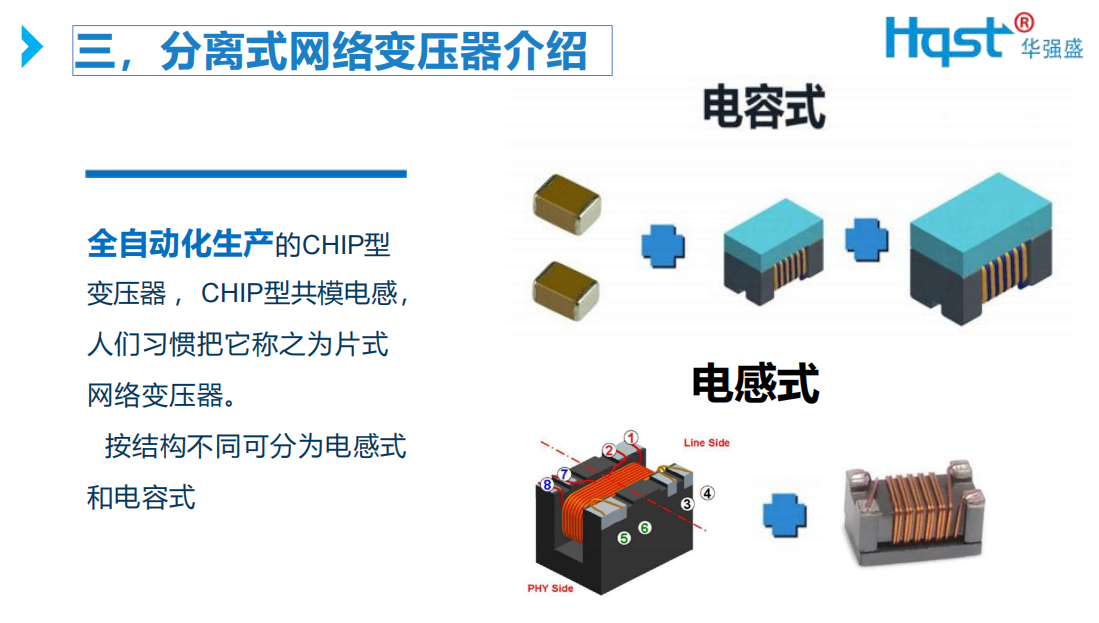
如何用电容式的片式 CHIP LAN 网络变压器(电感)来替代消费级传统网络变压器,电气原理图是怎样的?
运用笙泉评估板(EVB),高效开发M0应用产品
【RA4L1-SENSOR】+ RA4L1-SENSOR开发版之点灯实现流水灯跑马灯
三防漆7大死角终结者!PCBA防水新工艺如何实现360°零盲区防护




评论