 详解旋转目标检测方法与结果
详解旋转目标检测方法与结果

极市导读本文是今年刚被CVPR接收的文章,关于CSL的优化版本Densely Coded Labels (DCL),优化了过于厚重的预测层以及对类正方形目标检测的不友好。附有相关代码与demo展示。 》》加入极市CV技术交流群,走在计算机视觉的最前沿
一、介绍
Densely Coded Labels (DCL)是 Circular Smooth Label (CSL)(https://zhuanlan.zhihu.com/p/111493759)的优化版本。DCL主要从两方面进行了优化:过于厚重的预测层以及对类正方形目标检测的不友好。
文章地址:
Dense Label Encoding for Boundary Discontinuity Free Rotation Detection
https://arxiv.org/abs/2011.09670
代码地址:
DCL-Tensorflow
https://github.com/yangxue0827/RotationDetection
二、厚重的预测层
CSL编码方式与独热编码(one-hot)均属于稀疏编码(Sparsely Coded Label, SCL)。稀疏编码的一个明显缺点是需要较长的位数来进行编码,以CSL为例,下面这种公式是其编解码的具体过程:

CSL编解码过程
其中 , 和 分别表示角度范围(默认是180)以及所划分的角度类别。
那我们就可以计算出使用CSL编码方式或独热编码时的预测层厚度:

CSL编码方式与独热编码的预测层厚度计算公式
其中 表示anchor的数量。
而使用回归进行角度预测时的预测层厚度仅为:
回归方法的预测层厚度
以 为例,CSL编码方式与独热编码的预测层厚度是1620,而基于回归的预测层厚度只有9。这使得基于稀疏编码方法的参数量(Params)和计算量(GFlops)相比基于回归方法增加了26.40%和32.34%,造成模型训练和测试的效率低下,如下表所示。
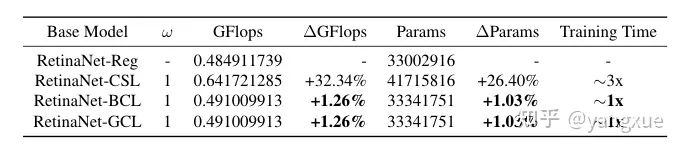
参数量(Params)和计算量(GFlops)的比较
因此,如何减短编码长度是提高模型效率的关键。因此我们想到了密集编码方法(Densely Coded Label, DCL),主要编码方法有二值编码(Binary Coded Label, BCL)和格雷编码 (Gray Coded Label, GCL),它们的预测层厚度计算公式如下:

二值编码和格雷编码的预测层厚度计算公式
同样以 为例,它们所对应的预测层厚度只有72,只增加1.03%的参数量和1.26%的计算量,和回归方法的效率几乎一样。下式是它们的编解码过程,以二值编码为例:

BCL编解码过程
其中二值编码和格雷编码的编码伪代码:
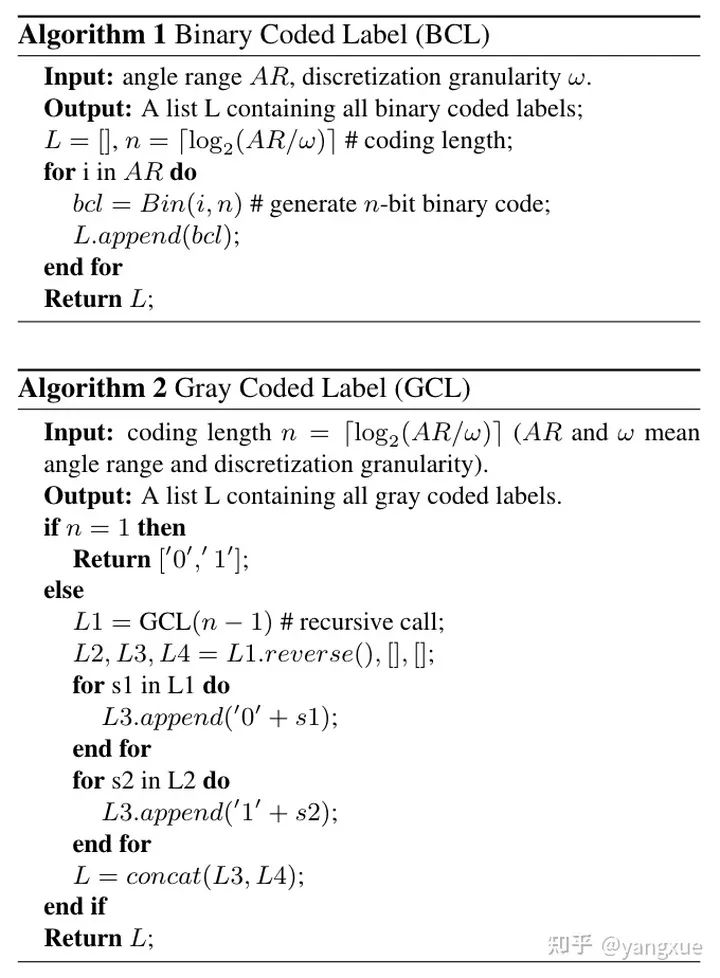
二值编码和格雷编码的编码伪代码
尽管编码长度大大减少,但会引入几个其他问题。
第一问题是二值编码在一定程度上失去了相邻角度之间的“距离远近”,也就是相邻值之间的编码结果可能发生巨大变化,没有了CSL方法中强调的容忍性。比如,3和4在三位的二进制编码结果分别为011和100,如下表所示。

十进制数所对应的三位二值编码和格雷编码
可以看到所有三个位置都发生了变化,导致两个角度预测的误差很大。而格雷码没有这样的问题,这是因为在一组数字的编码中,任何两个相邻数的格雷码只有一位不同。由于最大值和最小值之间也只有一位数字不同,因此格雷码也称为循环码。格雷编码的缺点也很明显,尽管相邻角度之间的编码形式差别不大,但是具有较大差异的角度的编码差异也不是很明显,例如1(001)和6(101)。
第二个问题是所划分的角度类别数需要是2的指数倍才能保证每一种编码都对应一种角度,否则会有大量冗余的编码(尽管实验验证这个问题影响不大)。如果将180度范围划分为 个类别,则每个划分间隔的范围为 。根据CSL文章中的计算公式,理论期望误差和最大误差分别是 和 ,这种大小的误差在是可以忽略不计的。
为了更好比较稀疏编码和密集编码,下图就是一个具体例子:
稀疏编码和密集编码的比较例子
三、类正方形目标检测的不友好
不管是CSL还是DCL,为了避免角度周期性(PoA)和边的交换性(EoE)问题,它们均采用了“角度分类+长边定义法”的组合。长边定义法有这样一个问题,他无法较好定义一个类正方形目标,如下图所示:
类正方形检测问题
图的左边是gt,右边是一种“视觉可行”的预测结果,之所以说“视觉可行”是因为此时的计算误差非常大。这个误差主要来源于角度(类正方形目标两边近似相等,因此尽管wh的顺序相反,误差依然很小)。仔细观察可以发现这两种框的角度差约等于 。其实使用周期为90的定义方法对类正方形目标来说更加合适(如OpenCV定义法),长边定义法有明显的缺陷。我的另一篇文章GWD详细讨论了这种问题,有一句话概括长边定义法出现这种问题的原因:目标长宽比的减小使得评估(IoU)和损失( -norm)之间的不一致性逐渐被放大。
针对这个问题以及第一个问题中提到的容忍性的消失,我们设计了一个损失权重(ADARSW),具体公式如下:
ADARSW权重
具体的想法是通过预测和gt的十进制差值来引入容忍性,三角函数的引入来解决角度周期性和类正方形检测问题(通过长宽比来调整 参数,从而调整三角函数的周期)。
四、实验结果
下表是对角度离散化粒度 的消融实验。尽管理论上越小,理论误差越小,预测精度上限越高,但是会增加角度分类的难度。越大也不好,太大的话理论误差太大,预测精度上限太低。一个合适的取值范围是[180/32-180/256]。并且我们发现,基于分类的角度预测方法(CSL和DCL)比基于回归方法在高精度 上更有优势,并且DCL比CSL效果更好,当然效率也更高。
角度离散化粒度的消融实验
下表是对所提权重的消融实验,主要列举了DOTA数据集中10种长宽比比较小的类正方形目标,并验证了ADARSW的有效性。

ADARSW的消融实验
下表是在不同数据集上对三种不同方法的比较,我们发现BCL》CSL》Reg.。

其他数据集上的效果验证
下面两个表格是所提方法在两种数据集上的SOTA对比,DCL-based方法具有一定的优势。
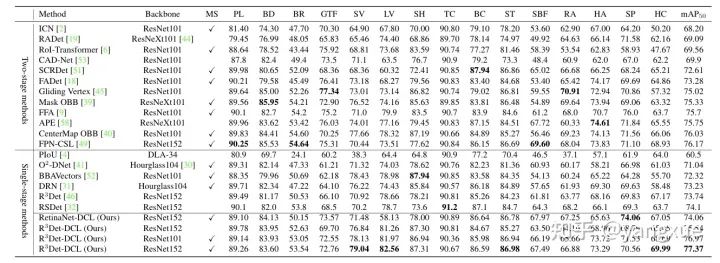
DOTA数据集上的SOTA方法对比
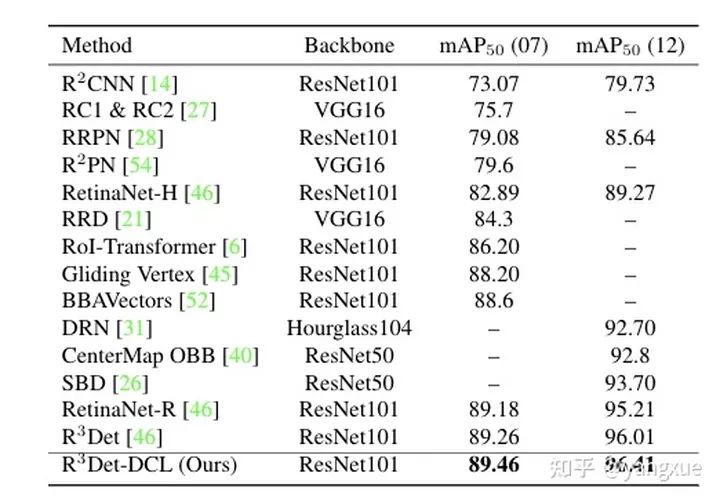
HRSC2016数据集上的SOTA方法对比
下图是对DCL方法的所预测角度的特征可视化:
RetinaNet-DCL角度特征可视化
五、总结
基于角度分类预测的方法基本告一段落,CSL和DCL验证了角度分类这条路子的可行性,那其实接下来可以研究如何更好分类,可以借鉴很多方向的分类损失设计,例如人脸识别。但是,这两篇方法并没有表现出角度分类这条路的优越性,我所看到的优势仅仅是方法本身不存在边界问题,也就是论文题目所写的Boundary Discontinuity Free,但是代价是存在理论误差以及模型参数量和计算量的增加。因此,最近我又回到了“角度回归预测+新loss设计”这条路,一个工作是GWD(https://arxiv.org/abs/2101.11952),欢迎大家交流讨论。
另外,简单介绍一下我所写的一个基于tensorflow框架的旋转检测benchmark:
https://github.com/yangxue0827/RotationDetection
支持的算法:RetinaNet、Faster-RCNN等baseline以及SCRDet (ICCV19)、R3Det (AAAI21)、RSDet (AAAI21)、CSL (ECCV20)、DCL (CVPR21)、GWD等创新方法;
支持的数据集:DOTA、HRSC2016、ICDAR2015、ICDAR2017 MLT、MSRA-TD500、UCAS-AOD、FDDB、OHD-SJTU、SSDD++;
提供大量不同的预训练权重和训练好的权重;
训练可视化分析,以R3Det (AAAI21)为例:
SCRDet (ICCV19):https://arxiv.org/abs/1811.071263Det (AAAI21):https://arxiv.org/abs/1908.05612RSDet (AAAI21):https://arxiv.org/abs/1911.08299CSL (ECCV20):https://arxiv.org/abs/2003.05597DCL (CVPR21):https://arxiv.org/abs/2011.09670GWD:https://arxiv.org/abs/2101.11952R3Det (AAAI21):https://arxiv.org/abs/1908.05612
训练可视化
统计量记录
5. RotationDetection的总体框如下:
RotationDetection框架结构
6. demo:https://www.zhihu.com/zvideo/1289379563034636288
编辑:lyn
-
编码
+关注
关注
6文章
1041浏览量
57181 -
目标检测
+关注
关注
0文章
235浏览量
16559 -
计算机视觉
+关注
关注
9文章
1716浏览量
47750
原文标题:旋转目标检测方法解读(DCL, CVPR2021)
文章出处:【微信号:cas-ciomp,微信公众号:中科院长春光机所】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
RetinaNet深度学习模型突破航空图像目标检测难题

DC 转换器气密性检测仪工作原理详解-岳信仪器


YOLO5目标检测方案-基于米尔RK3576开发板
电压放大器在全导波场图像目标识别的损伤检测实验的应用

基于级联分类器的人脸检测基本原理
广和通发布端侧目标检测模型FiboDet
使用aicube进行目标检测识别数字项目的时候,在评估环节卡住了,怎么解决?
基于低频旋转电压信号注入的PMSM初始定位
气密性检测仪的核心应用范畴及其所针对的检测目标

无刷直流电机反电势过零检测新方法
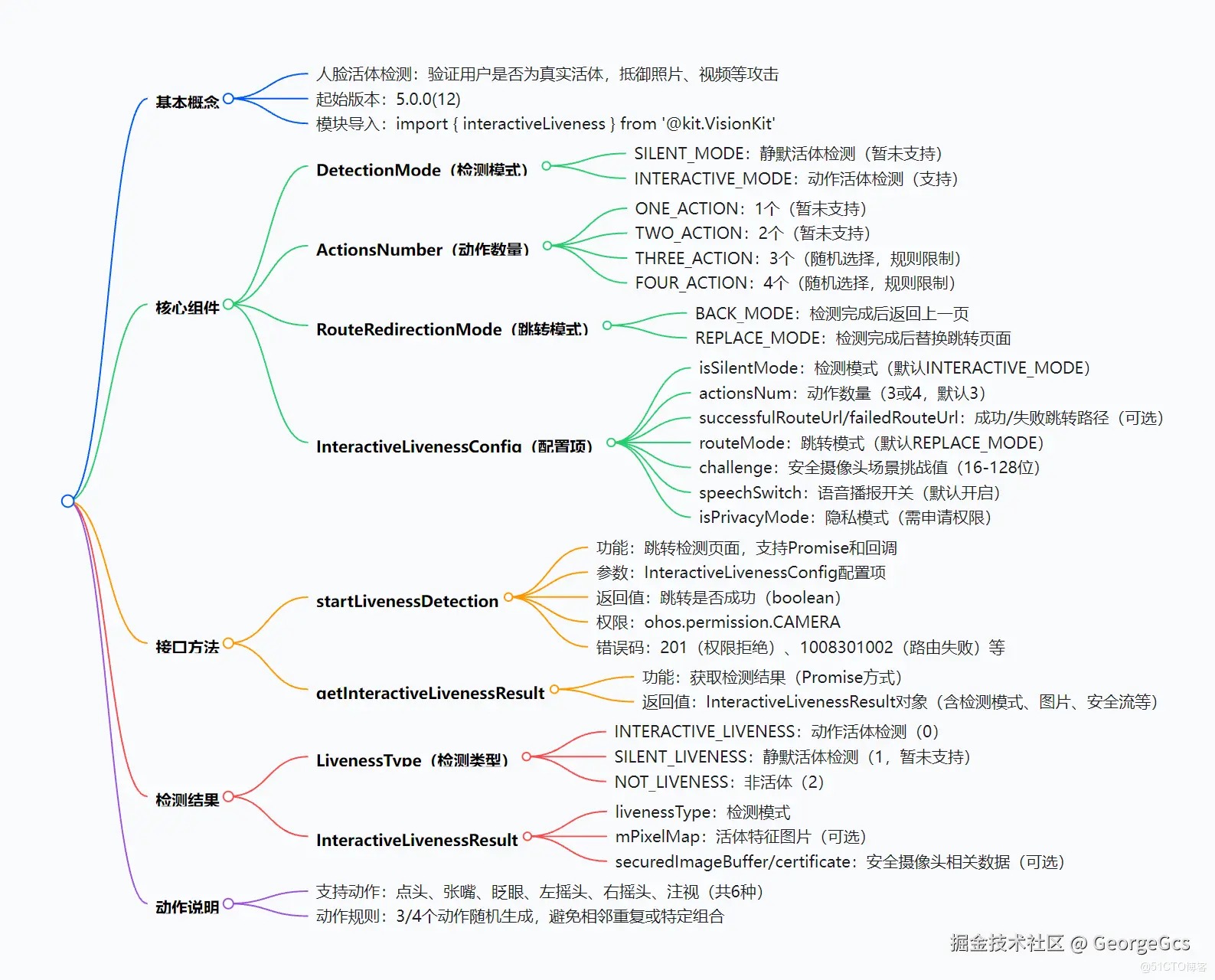
【HarmonyOS 5】VisionKit人脸活体检测详解
基于LockAI视觉识别模块:C++目标检测
基于LockAI视觉识别模块:C++目标检测




评论