 卡诺普将逐步开拓机器人的应用宽度
卡诺普将逐步开拓机器人的应用宽度

12月22日,在2020高工机器人&高工移动机器人年会技术向新专场上,卡诺普董事长李良军以《“脑”力全开,行业黑马》为主题发表了演讲。
卡诺普董事长李良军
演讲伊始,李良军首先回顾了卡诺普的发展历程:
2012年,卡诺普成立,并以机器人控制器(大脑)业务进入行业; 2013年,卡诺普机器人控制器批量应用于比亚迪、富士康等大型企业; 2014年,在不断丰富控制器功能基础上,卡诺普控制器销量处于行业领先; 2016年,卡诺普专注焊接领域智能传感器研究; 2018年,卡诺普掌握了从控制器、驱控一体机、激光传感器等整套的机器人电气技术并得到批量应用,其中,控制器销量占当年国产机器人控制器销量50%;累计销售30000台+,同年12月,卡诺普推出工业机器人整机; 2019年,卡诺普机器人销量1500+; 2020年,卡诺普机器人销量预计翻番。
李良军表示,在整个发展历程中,卡诺普的核心价值观始终是:不管是做控制器还是整机,本质是要让客户用好机器人;因此卡诺普对待产品的态度是低调求真,不断满足客户需求;在方案及服务上,卡诺普及时高效、不留死案。
让客户用好机器人
2018年以前,卡诺普的重心是通过向客户提供性能优异的控制器,针对产品的使用场景,对标研发并提升功能、性能等方面指标,助力工业机器人达到更稳定的可靠性和更高的控制精度等。
在与客户紧密对接的过程中,卡诺普发现很多来自客户现场的故障,除了机器人零部件出现问题之外,机器人产品批量制造的一致性与寿命问题,导致终端客户在应用机器人上产生较大困扰。卡诺普意识到,光做好机器人的大脑并不能完全实现公司让客户用好机器人的使命,于是卡诺普正式涉足机器人整机领域。
李良军表示,卡诺普研究机器人不是简单的模仿学习,而是针对场景应用进行正向设计,通过动力学仿真技术,卡诺普建立了机器人的正向模型,可有效满足成本控制和机器人精确运动的要求;通过模态分析,充分验证卡诺普机器人的刚度;对于工程样机,卡诺普设置了16个大项及64个小项的测试,确保卡诺普机器人能够满足客户特定应用场景下的性能需求。
在此基础上,为进一步提升机器人整机性能及可靠性,卡诺普设置了三重保护:驱动器防护马达/减速机、运动柔顺冲击小、控制器保护机器人,减少核心零部件的磨损,从而稳定产品精度。
李良军表示,在焊接应用场景中,对机器人的定位精度要求高,卡诺普通过自主开发机器人精度标定仪,进行大位置、全行程的数据采集,最大可能提升整机精度,以满足卡诺普机器人在焊接领域各个场景的精度要求。
事实上,在客户现场,精度应该是在机器人产品品质一致性上一层的需求,而对于底层的品质管理是基石。为此,卡诺普建立了贯穿原材料、生产加工、测试、出厂等产品生产全周期的品质管理体系。
李良军指出,卡诺普会对每个零部件的尺寸、质量进行全面检验,首先在源头上提升产品合格率、一致性;在各个生产环节进行详细数据记录,同时卡诺普在工厂内部实现了可量化的操作,通过将机器人分为多个工作站,实现流程化作业,突出重点、控制核心,对每个节点的生产进行量化,最终实现生产全过程可视化。
在成品出厂前,卡诺普每一台机器人都要通过实时量化的24小时测试,从冷机到热机,严格把控合格关口,只有最终符合标准的机器人才能“放行”。通过为每个零部件设置二维码“身份证”,卡诺普可以找出在机器人任何一个部件内的详细生产记录,做到质量溯源。
“脑”力深耕行业
卡诺普致力于成为中国机器人先锋,以客户为中心,不断满足客户需求,这一发展目标注定卡诺普不会走大而全的路线,而是专注细分市场,深耕行业,一米宽做到一千米深,为市场输送好产品。
在焊接行业,卡诺普实现了全面的焊接功能覆盖和进阶升级。首先在基础功能上,卡诺普焊接机器人覆盖全面,包括焊接过程的完善控制、灵活的焊机匹配、专业的焊枪TCP校验、开放的后台PLC、多工位的配置、偏移及镜像等快速编程等功能。
针对薄板焊接对高效、质量的追求,卡诺普焊接机器人可做到鱼鳞焊(间断焊)、飞行起弧、小线段加速、焊丝定长回抽等;而对于厚板焊接专家化应用需求,卡诺普焊接机器人可做到摆动焊接、寻位功能、电弧跟踪、多层多道等;其它智能简便的需求,卡诺普焊接机器人可提供激光跟踪、外部轴协同、等比例缩放、图形化编程等功能供客户选用。
李良军指出,不同行业的标准焊接方法不一样,针对行业特性可以罗列出不同的焊接装备,目前卡诺普机器人已积累了9个解决方案,只要客户提出行业应用,卡诺普即可快速提出整体解决方案。
例如,中厚板卡诺普可以提供接触式寻位方案,通过电弧跟踪方案保证高品质焊接;激光跟踪方案,可以通过激光实时找到工件变形之后的焊接位置,以实现高品质的焊接。其中关键的智能传感器均由卡诺普自主研发生产,通过整体方案输出的方式,大大降低了采购成本,让客户既用得起又用得好。
通过功能升级、工艺进阶以及整体方案的输出,卡诺普将逐步开拓机器人的应用宽度及焊接领域的应用深度。
原文标题:卡诺普董事长李良军:“脑”力全开,行业黑马
文章出处:【微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
控制器
+关注
关注
114文章
17648浏览量
190291 -
机器人
+关注
关注
213文章
30602浏览量
219660
原文标题:卡诺普董事长李良军:“脑”力全开,行业黑马
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
卡诺普亮相2025高工焊接机器人技术与应用峰会
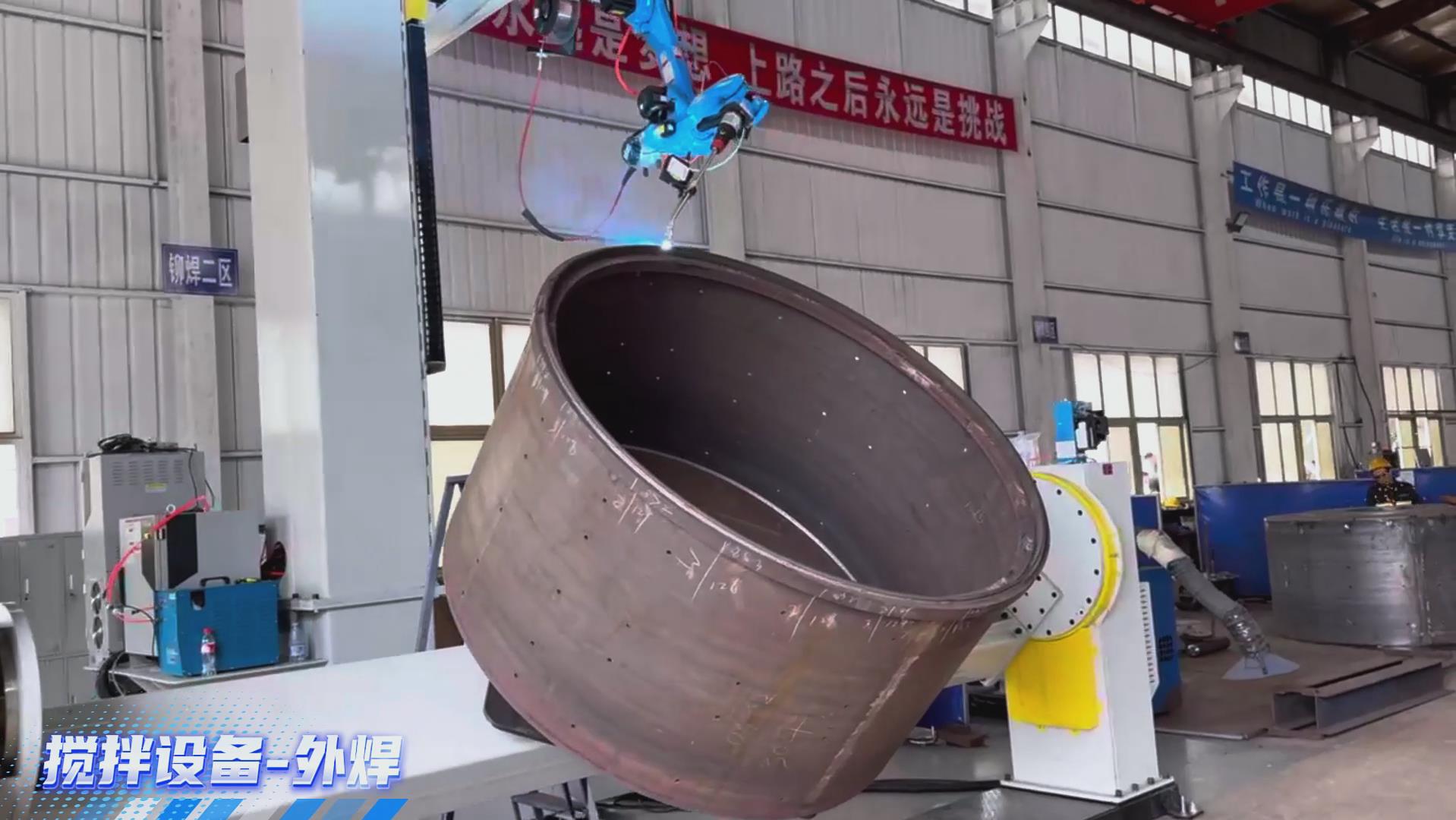
卡诺普机器人搭载创想焊缝跟踪系统,实现搅拌设备焊接智能化升级
工业机器人的特点
盘点#机器人开发平台
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
4月25-26日 阿普奇将亮相2025中国人形机器人生态大会






 工商网监
工商网监
评论