 MEMS激光雷达振镜技术指标及选型
MEMS激光雷达振镜技术指标及选型

一、激光雷达简介
早在1960年激光雷达概念就已提出,近些年来激光雷达才进入迅速发展时期,学术界和产业界一致认为激光雷达是无人驾驶(包括自动驾驶车辆,AGV,UAV等)不可或缺的探测和传感部件。激光雷达可用于物体探测与规避,物体识别与跟踪,即时定位与地图构建等。随着无人驾驶的快速发展,对于激光雷达的需求日益增长。
调制激光可以用于距离探测和测量,但传统的激光测距仪(laser rangefinder)仅能测量瞬时视场范围内的距离。为了形成更大视场范围内的3D形貌识别与模型构建,必须在既定的视场范围内实现激光光束的偏转和全局扫描。
二、MEMS激光雷达简介
MEMS,微机电系统,尺寸在毫米级或者更小的传感器、执行器或者微型系统。常见产品包括MEMS加速度计、MEMS麦克风、陀螺仪、微马达、微泵、MEMS振镜及其集成产品。
MEMS振镜(MEMS mirror)属于一种光学MEMS执行器芯片,可以在驱动作用下对激光光束进行偏转、调制、开启闭合及相位控制。目前广泛应用于投影、显示、光通信等场景中。
MEMS LiDAR,采用MEMS振镜作为激光光束扫描元件,具有体积小、宏观结构简单、可靠性高、功耗低等优势,是目前激光雷达实现落地应用的最合适的技术路径。
三、MEMS振镜及其选型参数
1. MEMS激光雷达振镜技术指标及选型
单轴和双轴MEMS振镜均可根据工作模式划分为谐振状态、非谐振状态和半谐振状态。
按照 MEMS振镜的驱动方式不同,可划分为静电驱动(ES),电磁驱动(EM),电热驱动(ET)以及压电驱动(PE)四种。
业内部分知名学者对于激光雷达的MEMS振镜选型及参考指标做了指引性的讨论,具体如下:
(1)FoV视场角
激光雷达的扫描角度,包括水平和竖直方向,对于自动驾驶激光雷达,更大的扫描角度意味着更大的视场角。
(2)Optical Aperture光学孔径:
MEMS振镜的光学特性与激光雷达的空间分辨率、探测距离等参数息息相关。
其中空间分辨率与激光波长、激光光束质量正相关,与激光光斑大小负相关,市场期望激光雷达的角分辨率尽可能小于1mrad,因此有着较好的激光光束质量时,MEMS振镜的直径应不小于1mm。 探测距离则与发射激光功率、透射效率、障碍物发射率、接收端半径等参数相关。(3)Scanning speed and Frequency扫描速度及谐振频率:对于自动驾驶应用的双轴MEMS激光雷达,MEMS振镜的横轴(水平方向,快轴)扫描频率应在0.5-2KHz之间,纵轴(垂直方向,慢轴)扫描频率应在10-30Hz之间。 此外,若选用的MEMS振镜的谐振频率较高,激光雷达的分辨率、帧率及鲁棒性均更佳。(4)Mirror Size and Weight振镜尺寸及重量
MEMS激光雷达得到产业界青睐的原因之一便是体积小、便于集成。因此在满足OpticalAperture和谐振频率的前提下,MEMS的尺寸应尽可能优化。
(5)FoM (Figure of Merit)品质因数:
以上参数均为MEMS振镜的本征参数。FoM(figure of merit)则是将以上重要参数融合后形成的描述激光雷达性能的综合指标。根据行业经验,激光雷达为获得良好性能,所选用的MEMS振镜的FoM值应更高,针对自动驾驶的激光雷达,FoM值至少为0.7。FoM值来源具体如下:
FoM=θe·de·fe其中,θe是激光雷达视场方向的有效光学扫描角,单位为rad; de是MEMS振镜有效尺寸,单位为mm;
fe是MEMS振镜的有效谐振频率,单位为kHz;
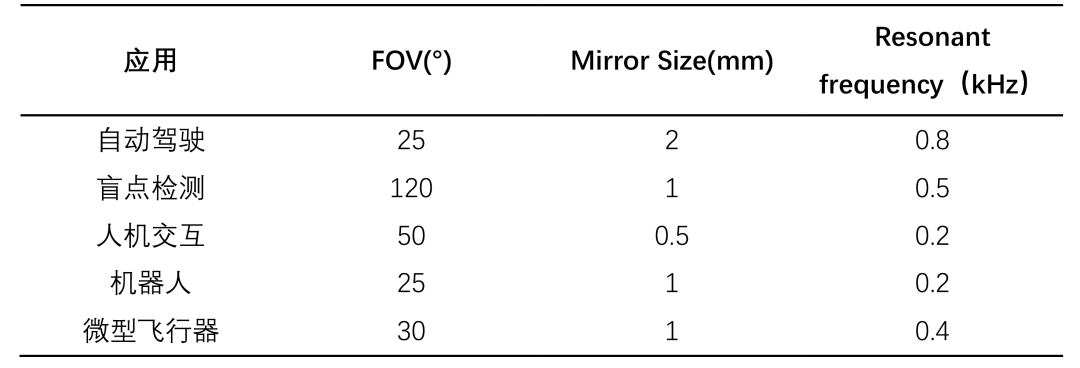
2. 多种用途激光雷达的MEMS振镜参考
总体而言,MEMS振镜的FoM值越大,越利于激光雷达性能提升。相较而言,单轴MEMS振镜因整体结构更为简便,所以更容易得到更大的扫描角度,更大的光学孔径和更高的谐振频率。
美国佛罗里达大学的谢会开教授团队针对多用途的激光雷达的MEMS振镜选型给出基础要求,如表-1所示。
表-1 不同应用的激光雷达对于MEMS振镜技术参数的最低要求
四、基于双轴MEMS振镜的激光雷达
图1 双轴MEMS振镜的激光雷达以“点”扫“面”
双轴MEMS振镜因其具有两个转动轴,因此有三种扫描模式:双轴谐振、单轴谐振/单轴非谐振、双轴均非谐振。
因双轴MEMS振镜结构及工艺较为繁杂,其扫描角度一般较小,图中所示的双轴振镜其扫描角度约为15°×11°,一般需要配合外围光学器件才可将FoV扩展到45°×11°。
美国佛罗里达大学的谢会开教授领导的研究团队对市面上34款不同规格的双轴MEMS振镜的本征参数和FoM值进行了深入的研究和计算,其中仅有6款MEMS振镜的FoM值大于0.7,其余28款MEMS振镜的FoM均小于0.7。
五、基于单轴MEMS振镜的激光雷达
图2 单轴MEMS振镜的激光雷达以“线”扫“面” 基于单轴振镜的MEMS激光雷达中,单轴MEMS振镜配合配合激光扩束透镜,可以使得一维MEMS振镜实现激光光束在水平方向和竖直方向的同步扫描。上图为Infineon开发的基于单轴振镜的MEMS激光雷达的原理图。单轴MEMS振镜的激光雷达工作状态分为谐振式和非谐振式两种。
另外,也有部分厂商将单轴MEMS振镜放置在旋转电机上,以实现二维扫描。
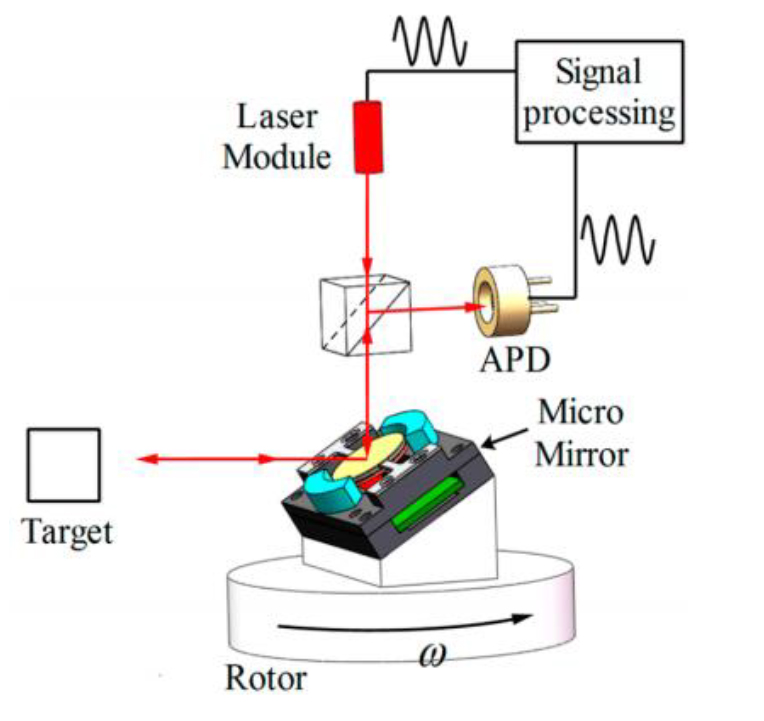
图3放置于旋转电机上单轴MEMS振镜
同样,美国佛罗里达大学的谢会开教授领导的研究团队也对市面上二十余款不同规格的单轴MEMS振镜的本征参数和FoM值进行了深入的研究和计算,其中FoM值大于1的MEMS振镜超过50%,FoM大于0.7的超过14款,且单轴MEMS振镜的激光雷达以“线”扫“面”,天然上拥有更高的帧率。
六、知微传感C系列MEMS振镜介绍
表-2 知微传感C系列MEMS振镜
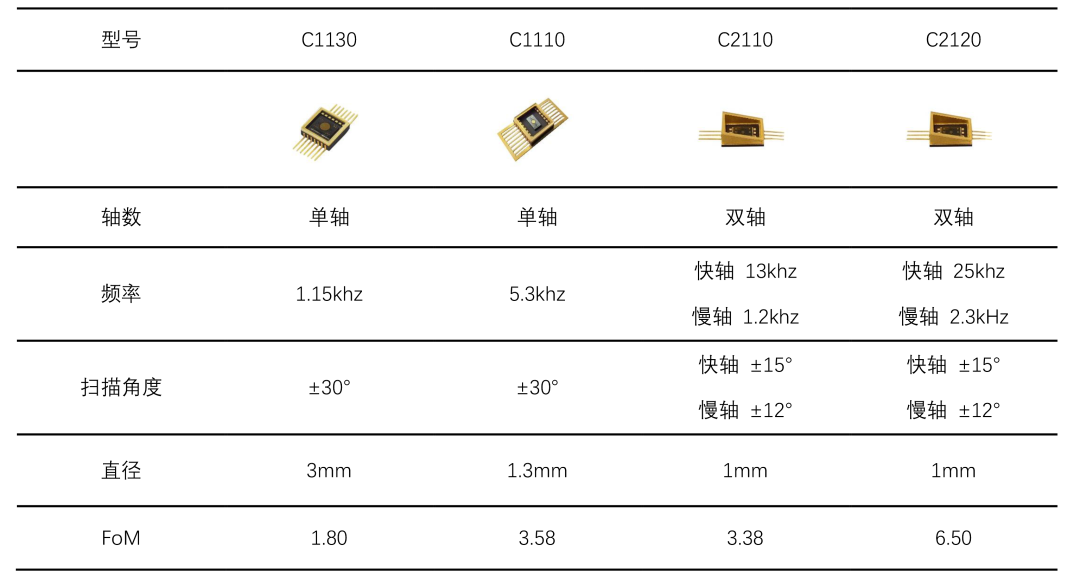
知微传感是国内MEMS振镜领域内的领军企业,在静电驱动、电磁驱动两种驱动技术,以及光学反馈和电容反馈两种检测技术上均有深厚的技术积累和布局。目前有4款C系列MEMS芯片已完成量产工艺导入,支持批量交付,其部分本征参数及FoM值如表-2所示。FoM值均大于0.7,适用于自动驾驶、盲区监测、人机交互、MAVs、机器人等激光雷达应用领域,欢迎垂询。
责任编辑:lq
-
传感器
+关注
关注
2578文章
55875浏览量
795647 -
mems
+关注
关注
129文章
4562浏览量
199942 -
激光雷达
+关注
关注
983文章
4609浏览量
197433
原文标题:MEMS激光雷达——振镜选型篇
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为啥自动驾驶不使用1550纳米激光雷达?

万线激光雷达是依托什么技术实现的?

激光雷达LiDAR技术的工作原理和应用场景

固态激光雷达参数以及避障视频
如何解决激光雷达点云中“鬼影”和“膨胀”问题?

禾赛科技与理想汽车续签激光雷达合作
激光雷达为什么会出现串扰的问题?

800线!禾赛发布ETX激光雷达
自动驾驶激光雷达可以安装在哪些位置?

全固态激光雷达为什么迟迟未来?其技术难点是什么?
SPAD席卷车载激光雷达市场
超酷的树莓派激光雷达扫描仪!




评论