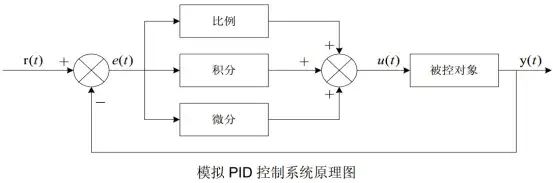
 三大PID控制算法的C语言实现方案
三大PID控制算法的C语言实现方案

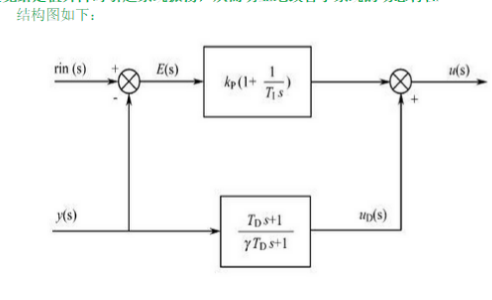
(1)微分先行PID控制算法
微分先行PID控制的特点是只对输出量yout(k)进行微分,而对给定值rin(k)不进行微分。这样,在改变给定值时,输出不会改变,而被控量的变化通常是比较缓和的。这种输出量先行微分控制适用于给定值rin(k)频繁升降的场合,可以避免给定值升降时引起系统振荡,从而明显地改善了系统的动态特性
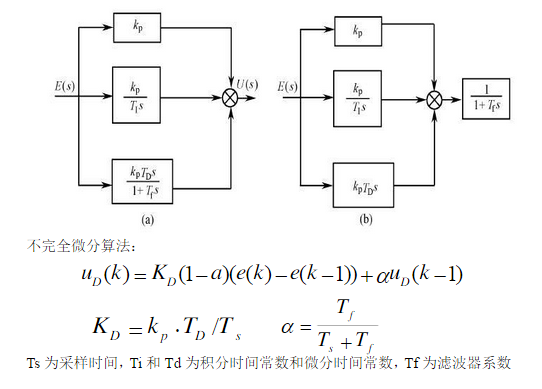
(2)不完全微分PID控制算法
在PID控制中,微分信号的引入可改善系统的动态特性,但也易引进高频
干扰,在误差扰动突变时尤其显出微分项的不足。若在控制算法中加入低通滤波器,则可使系统性能得到改善
不完全微分PID的结构如下图。左图将低通滤波器直接加在微分环节上,右图是将低通滤波器加在整个PID控制器之后
(3)带死区的PID控制算法
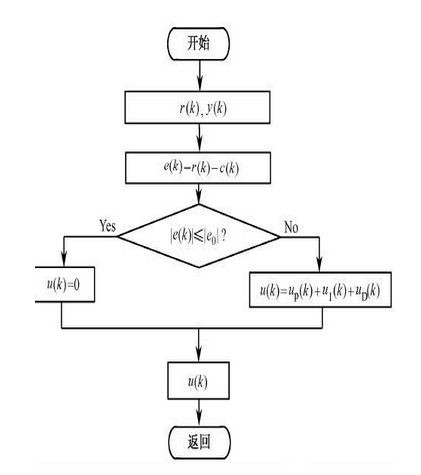
在计算机控制系统中,某些系统为了避免控制作用过于频繁,消除由于频繁动作所引起的振荡,可采用带死区的PID控制算法,控制算式为:
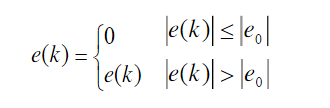
式中,e(k)为位置跟踪偏差,e0是一个可调参数,其具体数值可根据实际控制对象由实验确定。若e0值太小,会使控制动作过于频繁,达不到稳定被控对象的目的;若e0太大,则系统将产生较大的滞后 控制算法流程:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6078文章
45570浏览量
673392 -
PID
+关注
关注
38文章
1505浏览量
91874 -
PID控制
+关注
关注
11文章
465浏览量
42614 -
控制算法
+关注
关注
4文章
174浏览量
22838
发布评论请先 登录
相关推荐
热点推荐
fft算法c语言的实现
问题之前我烦恼了一会儿,但别忘了。 前者的展开是N/2,因为此时n是奇偶校验分离的,是从根据的可约束性得出的,在此不能混淆。
没有必要提到计算效率。 m级计算总共需要:
FFT
c语言实现
FFT算法
发表于 01-27 06:10
PID控制的算法
(也就是PWM占空比)。
3.那么U(t)与PWM之间存在怎样的联系呢?
下一篇说明连续系统的离散化问题。并根据离散化后的特点讲述位置型PID和增量型PID的用法和C语言实现过程
发表于 01-23 08:18
C语言实现PID算法介绍
PID 是 Proportional(比例)、Integral(积分)、Differential(微分)的首字母缩写;是一种结合比例、积分和微分三种环节于一体的闭环控制算法。
发表于 01-16 07:24
CW32L012的PID温度控制——算法基础
PID 控制算法是比例(Proportional)- 积分(Integral)- 微分(Derivative) 控制的简称,是工业控制、嵌入
复杂的软件算法硬件IP核的实现
具体方法与步骤
通过 C 语言实现软件算法,并验证了算法的有效性以后,就可以进行算法的 HDL 转化工作了。通过使用 Altium Des
发表于 10-30 07:02
单片机C语言实例(350+例)
350+单片机C语言实例!
纯分享帖,需要者可点击附件免费获取完整资料~~~【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
发表于 05-22 21:47



评论