 KUKAC2机器人程序备份更改路径
KUKAC2机器人程序备份更改路径

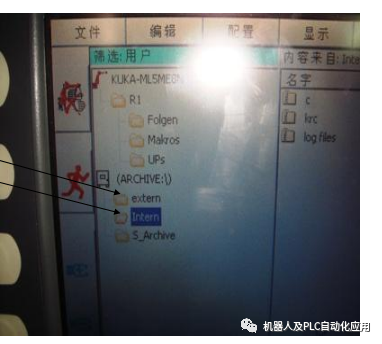
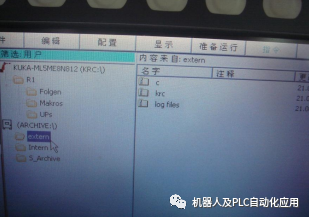
E盘:extern
A盘 :intern
机器人程序备份路径分为A盘 :intern ,另外一个是E盘:extern。两者的的区分在于先插入系统的系统会认为是A盘 :intern,后插入系统的系统会认为是E盘:extern。两个U盘在备份中最大的区别在于,A盘备份程序时,所有机器人备份出来的程序名只能是intern.zip,所以A盘里只会存在一个程序,而E盘备份出来的程序名称是可以自己定义的,只要现场机器人名称定义的不一样,所有机器人程序就都可以存到这个U盘里。
在系统C/KRC/UTIL/KRCCONFIGURATOR目录下找到 krcConfigurator.exe文件,里面有存储机器人程序的路径 .
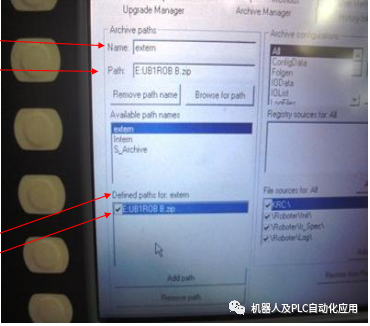
Name:是定义内部路径还是外部路径.
Path:是定义路径的详细名称。例如:我们想把程序备份到E盘里,那么Name里一定写的是extern,Path里写的应该是E:UB1 ROB B.ZIP。
注意:UB1 ROB B一定要与你机器人参数里的名称一致,否则机器人不会识别此路径。
在Defined paths for extern 里需要将E:UB1 ROB B.ZIP激活.
机器人参数菜单:
机器人名称:
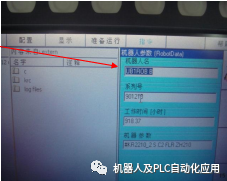
更改后机器人名称会在此有显示 :

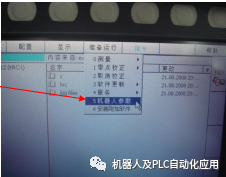
我们备份程序时有两种途径。
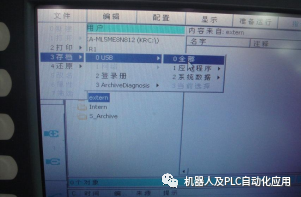
1.在菜单条:文件/存档/USB/全部。
2.在ARCHIVE:/里选择 intern 还是 extern ,全部存档。两种方式都可以。当我们备份完程序后应该看一下extern里是否有程序存在,如果有则证明成功。
-
机器人
+关注
关注
213文章
30590浏览量
219609 -
程序
+关注
关注
117文章
3836浏览量
84766 -
KUKA
+关注
关注
3文章
218浏览量
17360
原文标题:KUKAC2机器人程序备份更改路径
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录






 工商网监
工商网监
评论