 一种柔性的可密切贴合皮肤表面的皮肤湿度传感器
一种柔性的可密切贴合皮肤表面的皮肤湿度传感器

摘要:在聚酰亚胺柔性衬底上采用微机电系统(MEMS)加工技术制作了用于智能可穿戴系统的柔性湿度传感器,传感器具有耐弯折、可穿戴、测量精度高、响应时间短的优点。实验采用湿度发生器、盐箱、LCR电桥对传感器的容值、输出特性、响应时间进行了检测分析。分析结果表明:该柔性湿敏电容对人体皮肤及环境湿度响应良好,传感器输出值与相对湿度呈现良好的线性关系,线性相关系数0.999,湿度检测范围(10~90)% RH,非线性0.79 % RH,响应时间6 s。实验采用的MEMS加工工艺技术成熟,可以实现批量生产。
引言
智能可穿戴柔性湿度传感器是一类可用于单兵可穿戴装备系统,对士兵进行无创性生理健康监测及环境监测的装备,具有便携、可穿戴等优点,不影响士兵的战斗力,已经成为各国大力研制、部署的信息化检测装备之一。皮肤湿度能反映人体的出汗情况进而反映出人体的健康情况及所处环境情况,传感器通过对士兵生理信息的长时间实时监测,当士兵被部署在目视区域外的封闭或隐蔽空间中时,实时评估战士的生理、心理状况,将信息反馈给总控系统,及时采取必要措施降低对士兵的身体伤害及生命威胁,他们的生理参数通过系统检测并发送给救援及指挥系统,通过信息判定士兵作战能力,对受伤士兵提供救援,并为作战指挥部署提供信息支持。同时柔性湿度传感器还可用于飞行员和航天员的生理健康监测,具有较广泛的应用领域。
国外美国北卡罗莱纳州立大学朱勇教授等人开发了一种柔性的可密切贴合皮肤表面的皮肤湿度传感器。采用具有极好导电性能和力学性能的银纳米线作为主要导电材料,可拉伸性能优异的硅胶作为包裹银纳米线的载体,采用叉指电极结构,并通过测量两个电极之间的皮肤阻抗变化来得到皮肤湿度的变化。
我国的可穿戴柔性湿度传感器研制在敏感元件制造、检测物种类范围、微纳加工工艺等方面较国外还有较大差距。本文设计并研究了电容型湿度传感器用于皮肤及环境湿度的检测,填补了国内空白。
1实验
1.1传感器的制备
本文基于柔性微机电系统(micro electro mechanical system, MEMS)技术,在聚酰亚胺(polymide, PI)柔性衬底上制作湿度传感器,PI是常见的柔性传感器基底材料,具有化学性质稳定、耐高温、与电极材料结合力好的优点。用其制作的薄膜拉伸强度都在115 MPa以上,断裂伸长率超过40 %,具有优良的抗弯曲特性。本项目感湿膜固化温度较高,达到300℃,一般的柔性高分子材料无法长期耐受此高温,因此选用聚酰亚胺为基底材料,厚度25 μm。
加工方法为将基底溶液聚酰胺酸悬涂在制备有牺牲层的载体硅片上,采用MEMS工艺制作湿度敏感单元,本文制作的湿度传感器采用“三明治”结构,包括上电极、感湿层和下电极,上下电极均采用蒸镀工艺,蒸镀金作为电极;感湿膜为聚酰亚胺材料,采用旋涂的方法制备感湿层。具体的工艺流程图如图1所示。

图1 湿敏单元工艺流程
各工艺步骤具体操作为:1)基片清洗:选用柔性聚酰亚胺薄膜为基底,采用丙酮清除硅片表面的污垢及杂质,使其达到规定的清洁度;2)蒸发:Cr/Au将金属Cr/Au通过热蒸发沉积在基片上,厚度约为400/4000×0.1 nm,形成均匀的金属;3)下电极制作:薄膜涂胶后,采用光刻机进行紫外曝光;将曝光后的硅片置于显影液中显影;显影结束后,利用湿法刻蚀工艺去除裸露出的Au、Cr薄膜,完成湿敏电容下极板的制作,Cr厚度为(400~500)×0.1 nm,Au厚度为(3000~5000)×0.1 nm。其中Cr为过渡层,Au作为湿敏电容的下极板,其显微镜图如图2所示;4)湿敏薄膜制作:将合成的聚酰亚胺前躯体聚酰胺酸旋涂在基底上,放入烘箱中,80 ℃保温1 h,以5 ℃/min的升温速度升至140℃,保温1 h;再以5 ℃/min的升温速度升至180℃保温1 h,最后升至300℃保温1 h,完成聚酰亚胺湿敏材料的固化,湿敏膜厚度2 μm;5)湿敏膜固化:湿度敏感薄膜是由高分子材料经过高温固化而成,通过热失重分析对湿度敏感薄膜的制备技术进行研究,分析在热演化过程中的分子结构变化,确定膜厚、亚胺化程度、亚胺化后分子结构、阶梯式升温热亚胺化的温度的确定,进而对感湿膜固化过程进行控制,使固化条件得到优化。为了避免电介质膜出现气孔或开裂、条纹,需要在真空环境中对湿度敏感薄膜进行固化,真空度1×10-2Pa;6)湿敏薄膜图形化:在聚酰亚胺薄膜上蒸镀铝金属薄膜作为掩模,光刻后,腐蚀裸露的铝,再通过干法刻蚀工艺参数的控制刻蚀裸露的聚酰亚胺湿敏薄膜,完成图形化后去除铝掩模;7)多孔上电极制作:采用电子束蒸发制作湿敏单元的上电极,控制工艺参数使金属膜层为微纳多孔连续状态,以保证湿敏单元的灵敏度及响应时间,上电极厚度(500×0.1) nm。
1.2传感器性能测试
采用德国蔡司Axioskop40显微镜对实验制备的上电极和下电极进行观察;采用美国布鲁克Dektak XT台阶仪对电极及湿敏膜厚度进行测量;采用德国耐驰STA449F3热分析仪对湿敏膜固化温度展开研究。
传感器测试采用日本东荣公司生产的WLS-3型湿度发生器产生标准湿度环境;采用北京瑞普公司生产的HZ2790型LCR数字电桥对传感器的输出特性进行了测试;采用自制盐箱(NaCl饱和盐溶液盐箱内空气相对湿度75.5 % RH和LiCl饱和盐溶液盐箱内空气相对湿度12 % RH,20 ℃时)对传感器的响应时间进行了测试。
2结果与讨论
2.1下电极制作
实验在聚酰亚胺薄膜上采用蒸发的方法制作了下电极,图2为湿敏单元下电极显微镜图。如图分析实验制备的金电极,表面均匀致密、平整,无明显缺陷,采用台阶仪对金电极厚度进行分析,厚度约为(4000×0.1) nm。
图2 湿敏单元下电极显微镜图
2.2湿敏膜制作
电容型湿度敏感芯片的原理是利用湿度敏感的高分子聚合物含有吸水基团,吸附环境中气态的水分子,使聚合物的介电常数发生变化,电容值可由式(1)表示
Cpu=ε0εuS/d
(1)式中Cpu为电容值,pF;S为电容式传感器有效电极面积,设计值为5 mm×3.5 mm;d为高分子感湿膜层的厚度,mm;ε0为真空介电常数,8.85×10-12F/m;εu为高分子湿敏材料的介电常数,1.937。本文设计湿敏电容初始容值150 pF,经式(1)计算,湿敏膜厚度为2 μm。
湿度敏感薄膜是决定湿度传感器敏感特性的关键因素,本文开展了湿度敏感材料的薄膜可控制备技术研究。试验采用旋涂的方法制备湿敏薄膜,图3为旋涂转数与湿敏膜厚度关系。工艺试验结果表明,湿敏膜制备过程中匀胶机参数设置为4000 r/min。
2.3固化工艺研究
图4是聚酰亚胺聚合物两次升温扫描的DSC谱图,测试方法:升温速率为20℃/min,扫描温度范围是100~400℃,第一次扫描结束后待样品冷却到100℃时进行第二次扫描。

图3 旋涂转数与湿敏膜厚度关系

图4 PI的DSC谱
从图中可以看出,第一次的扫描曲线上出现了玻璃化转变和固化放热峰。聚酰亚胺低聚物的玻璃化转变温度为239 ℃,交联放热起始温度为300℃。第二次的扫描曲线较平稳,无放热峰出现,说明第一次扫描过程中材料就已固化完全。经过第一次DSC扫描以后,分子内C-N就发生了交联,形成了网络结构,减小了高分子链的运动能力,所以在第二次的DSC扫描曲线上,没有观察到交联放热峰,并且对应的玻璃化转变温度得到了很大程度的提高。实验结果表明聚酰亚胺材料在300℃后开始固化,随着固化过程的进行,400℃后聚酰亚胺开始发生分解,因此试验选取300℃为本项目制备聚酰亚胺薄膜固化温度。
2.4传感器输出特性分析
图5为柔性湿敏电容相对湿度与容值的关系曲线。由图分析可知,湿敏电容工作直线方程为y=0.186x+179.2,线性相关系数R2=0.999,非线性0.79 % FS,随着相对湿度的增加湿敏电容容值增大,并呈现良好的线性关系,传感器线性好,性能与刚性基底上制作的湿敏电容相当。

图5 柔性湿敏电容相对湿度与容值的关系曲线
2.5传感器响应时间
图6为柔性湿敏电容响应时间曲线。实验采用τ63.2作为传感器的响应时间,即将湿敏电容容值从低湿12 % RH(LiCl饱和盐溶液,20℃),变化到高湿75.5 % RH(NaCl饱和盐溶液,20℃)时容值变化量的63.2 %,所用时间即为响应时间。实验数据表明,本文研制的柔性湿敏电容响应时间为6 s,该传感器响应速度较快。

图6 柔性湿敏电容响应时间曲线
3结论
本文采用MEMS工艺设计制作了可应用于可穿戴装备制造的柔性湿度传感器,具有耐弯折、可穿戴、线性好、响应时间短的优点。经测试湿度检测范围10 %~90 % RH,非线性0.79 % RH,响应时间6 s。该传感器制作工艺成熟,易实现产品化,可广泛用于远程医疗、可穿戴健康设备、航空、航天等领域,具有广阔的应用前景。
-
电极
+关注
关注
5文章
880浏览量
28289 -
湿度传感器
+关注
关注
7文章
317浏览量
59597 -
智能可穿戴
+关注
关注
0文章
52浏览量
12324
原文标题:柔性湿度传感器制作技术研究
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
“电子皮肤”,人形机器人的柔性触觉传感器
四川大学:新一代光子离子皮肤:实现超快、无滞后的机械传感

中国科学院:高线性类皮肤柔性传感器研究取得系列进展
明治科普 | 让机器人拥有&quot;触感&quot;:电子皮肤如何实现?

最新分析:触觉传感器技术演化,电子皮肤市场空间将达155亿元
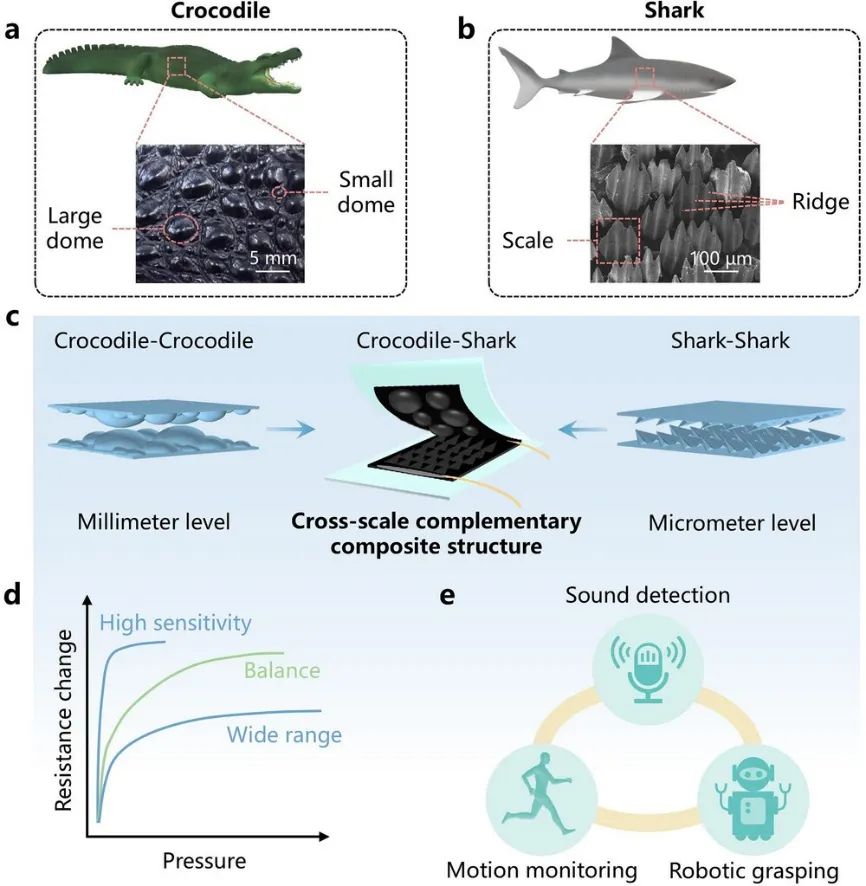
清华大学:鲨鱼与鳄鱼皮肤启发的高性能压力传感
上海交通大学:研究面向呼吸监测的超灵敏共价有机框架薄膜电阻式湿度传感器纳微快报
上海交通大学:基于多尺度互连和各向异性形态遗传压电陶瓷骨架的柔性自供电3D力传感器
中国科学院:电鳗启发离子电子人造皮肤,具有多模态感知和传感器内储层计算功能
中山大学:在柔性触觉传感电子皮肤研究进展
香港城市大学:革新“仿生皮肤”汗液传感器,突破性健康监测设备的新纪元

创新“仿生皮肤”汗液传感器问世
北京化工大学,中国石化北京化工研究院:一种用于柔性应变传感器的高拉伸、自愈、自粘聚丙烯酸/壳聚糖多

中国人民解放军总医院:用于具有宽量程和超高灵敏度的柔性压力传感器的仿生纳米纤维-琼脂复合材料





 工商网监
工商网监
评论