 微型软体机器人在体内/体外生物医学研究中具备广泛应用
微型软体机器人在体内/体外生物医学研究中具备广泛应用

微型软体机器人在体内/体外生物医学研究中具有广泛的应用前景。近年来,柔性机器人的驱动和运动研究方面已取得了大量的成果,但在环境感知、远程信号传输等方面还存在较大的挑战,离实际应用还有不小的距离。香港城市大学(香港城大)领导的研究团队基于此前研发的多足软体机器人(Nat.Com. 2018,9(1): 1-7)及微能源收集技术(Joule 2018, 2(4): 642-697),在微型机器人上集成了驱动、感知、信号传输等单元,通过耦合磁效应和压电效应,研制了一种可进行远程控制移动、周围环境感知和远程通讯为一体的无栓系微型软体机器人。
相关成果由香港城大的申亚京课题组与杨征保课题组以《基于耦合磁效应和压电效应实现远程控制移动、感知和通讯的毫米级软体机器人》(Battery-Less SoftMillirobot That Can Move, Sense, and Communicate Remotely by Couplingthe Magnetic and Piezoelectric Effects)为题目,于近日发表在综合期刊《尖端科学》(Adv. Sci.2020, DOI:10.1002/advs.202000069)上。
该微型机器人将机器人驱动单元和感知单元集成在一个多层薄膜(《0.5 mm)内,下部的仿生多足磁性复合材料肢体可提供驱动力,而柔性压电陶瓷复合薄膜可提供感知功能。论文的共同第一作者,香港城大生物医学工程学系博士后陆豪健说:“现阶段对于微型软体机器人来说,感知能力与运动性能的完美集成是一个挑战。这项工作借鉴了此前工作多足结构的设计以保证其运动性能,同时利用射频识别技术(RFID),将三个重要模块,即上层的近场通信(NFC)电子模块,中间的压电感知(PEG)模块和底部的多足软体驱动(MSR)模块(如图1所示)集成在总体尺寸小于10×30 mm2的机器人上,其大小仅与指尖相当。在外部的磁驱动下,该微型软体机器人可实现远程驱动、环境监控和无线通信,而无需任何负载电池或外部有线电源。”
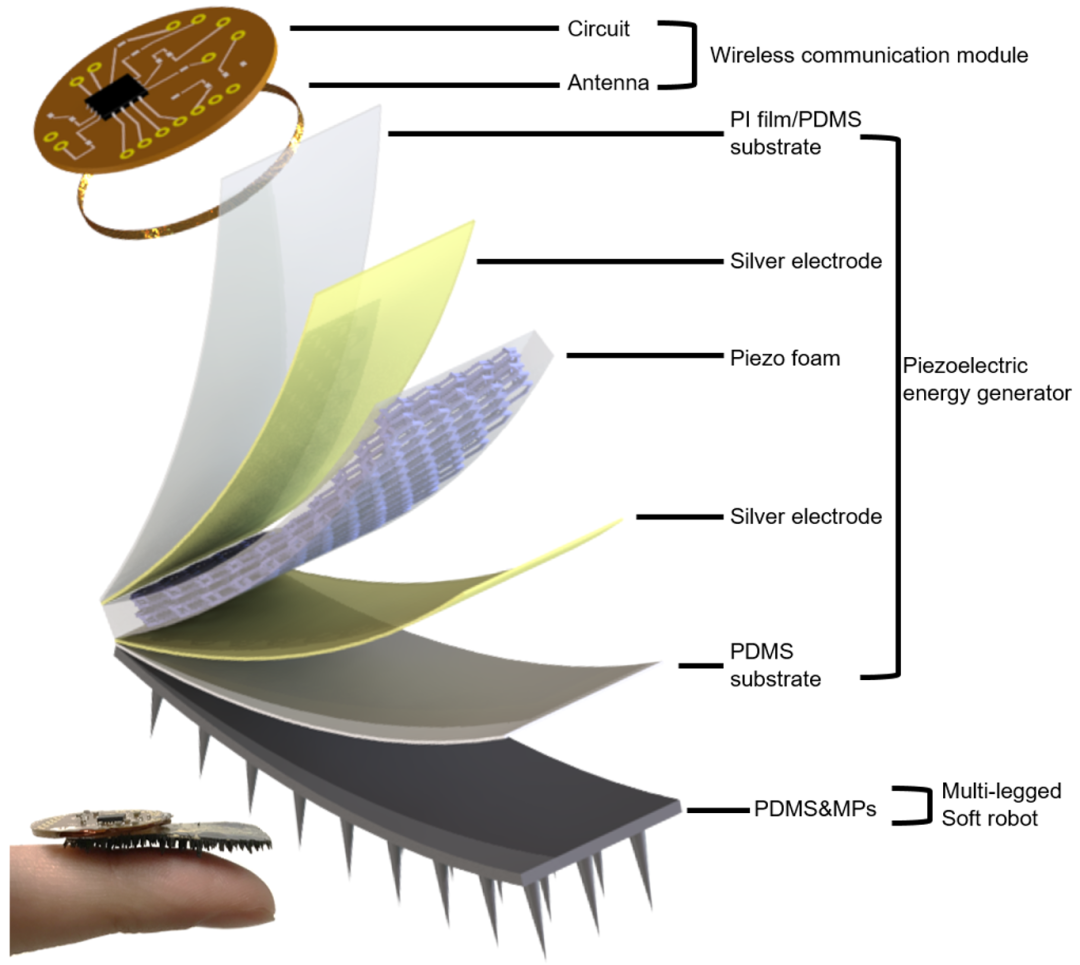
图1 无栓系微型软体机器人的三个组成模块
此前,香港城市大学(香港城大)领导的研究团队研发了一种可在干燥和湿润环境下运动的仿生多足软体机器人,该机器人可以通过磁场的控制,用拍打的方式或左右摆动的方式运动,并且可以负载超过自身重量百倍的物体移动,在生物医学领域具有重要应用(如图2所示)。
图2 仿生多足软体机器人的运动
此次研发的机器人,在此基础之上集成了三个重要模块,分别承担信号传输,传感识别和运动驱动的任务。其中NFC的使用可以使无线通信模块能够获取无线信号并将数据传输到任何NFC支持的消费类设备,例如智能手机和计算机。PEG模块由压电陶瓷复合材料(锆钛酸铅PZT和聚二甲基硅氧烷PDMS),两层银电极和基底(PI膜和PDMS膜)构成,其产生的压电信号能够用于对外界环境的感知。MSR模块由PDMS和磁性颗粒复合材料构成,其下方独特的多足设计减少了软体机器人运动的表面接触面积。
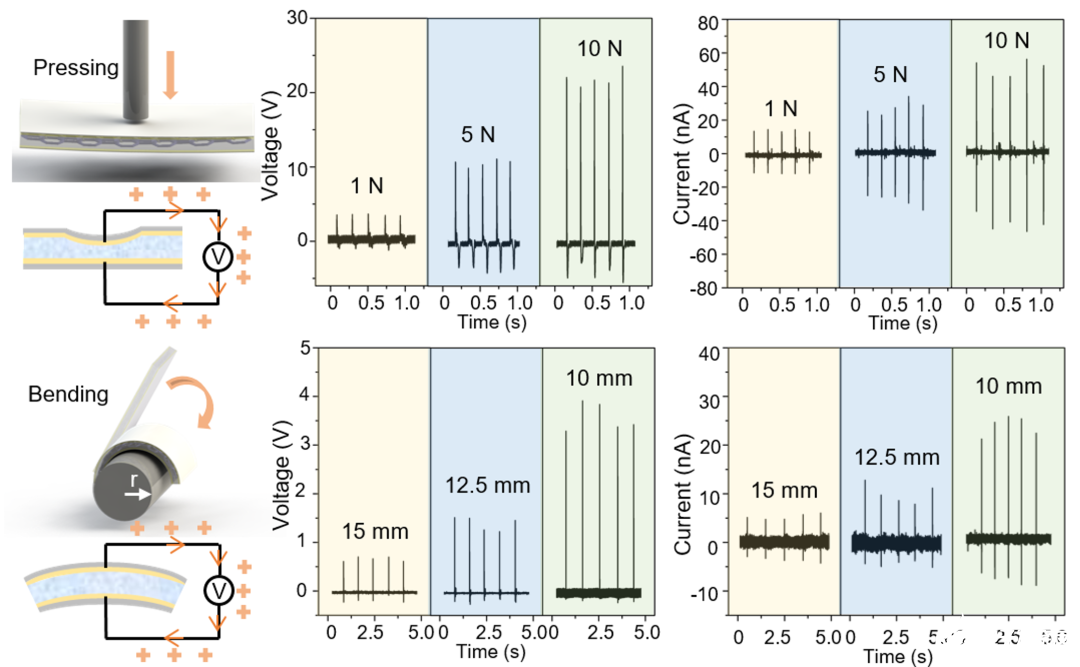
图3 PEG模块在不同压力和弯曲状态下的压电响应
除了多功能的集成,用于制作压电感知模块(PEG)的设计也很重要。论文的共同第一作者,香港城大机械工程学系在读博士生洪颖说:“与传统的将压电陶瓷粉末和高分子材料直接混合制成的压电陶瓷/高分子复合材料不同的是,这次我们基于纸模板制备了一种具有连续3D陶瓷框架的压电泡沫复合材料,让其具有更好的机械特性和压电特性(如图3所示)。与传统方法相比,这种无缝集成的全软体结构,能够很好地发挥全软体机器人的优势。”
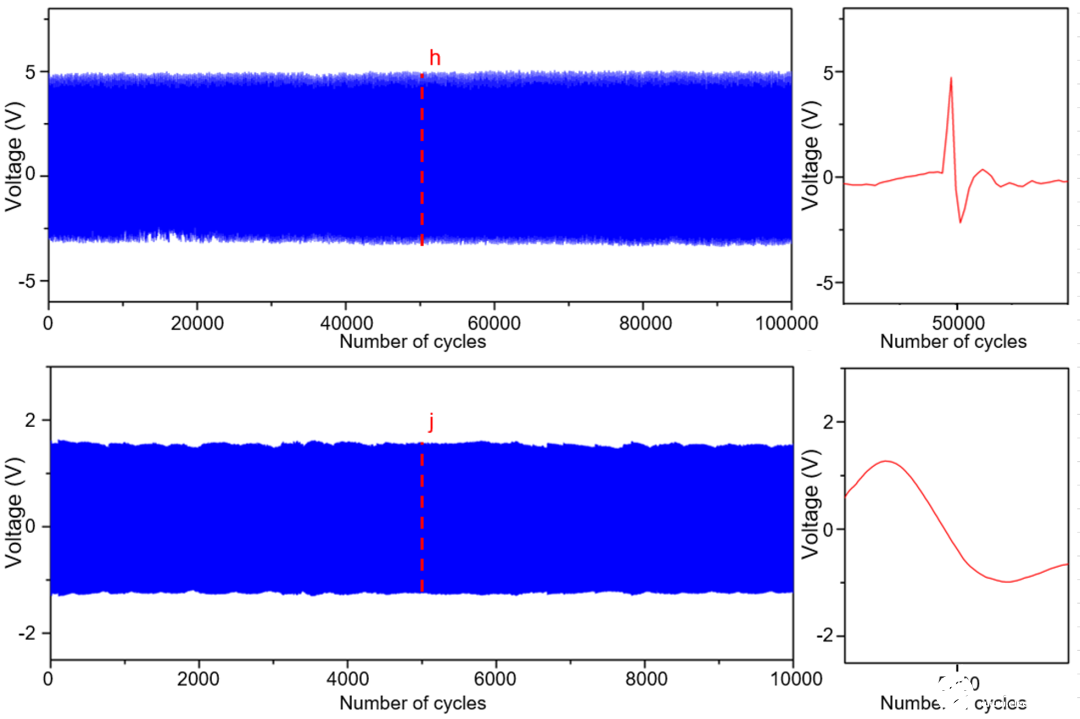
图4 PEG模块分别在压缩和弯曲状态下的循环特性
洪颖补充道:“此外,这种压电陶瓷复合材料同时具有很好的抗疲劳特性,在十万次压缩及一万次弯曲循环中都能保持很好的压电响应(如图4所示),保证了机器人的运动能力。”
图5 微型软体机器人的运动及其产生的压电信号
在实验中,通过外界磁场的控制,微型软体机器人可以以拍打的方式向前移动,其本身的PEG模块可以产生相应的压电信号(如图5所示)。值得指出的是,机器人运动所产生的压电信号会随着接触界面的不同而发生变化,例如刚性平面界面可以产生突变信号峰,刚性台阶界面导致信号峰值降低,柔性台阶界面可以得到一个非常平稳的信号波,液体界面由于表面张力的影响会产生双峰信号。“在运动过程中,机器人的针状足,就像无数个AFM探针一样不断地对周围环境进行扫描(如图6所示),我们期望将来能将这种技术用于体内不同区域的检查,如是否发生病变等。”陆豪健博士说道。
图6 微型软体机器人通过不同界面时的压电响应
责任编辑:pj
-
微软
+关注
关注
4文章
6764浏览量
108160 -
机器人
+关注
关注
214文章
31644浏览量
224543 -
感知
+关注
关注
1文章
79浏览量
12727
发布评论请先 登录
2026年中国十大机器视觉公司的决胜逻辑:全栈能力与场景深耕
ATA-7030高压放大器在压电软体机器人设计中的应用

量子、雷达、生物医学…复杂信号如何精准生成?答案在这台“信号引擎”

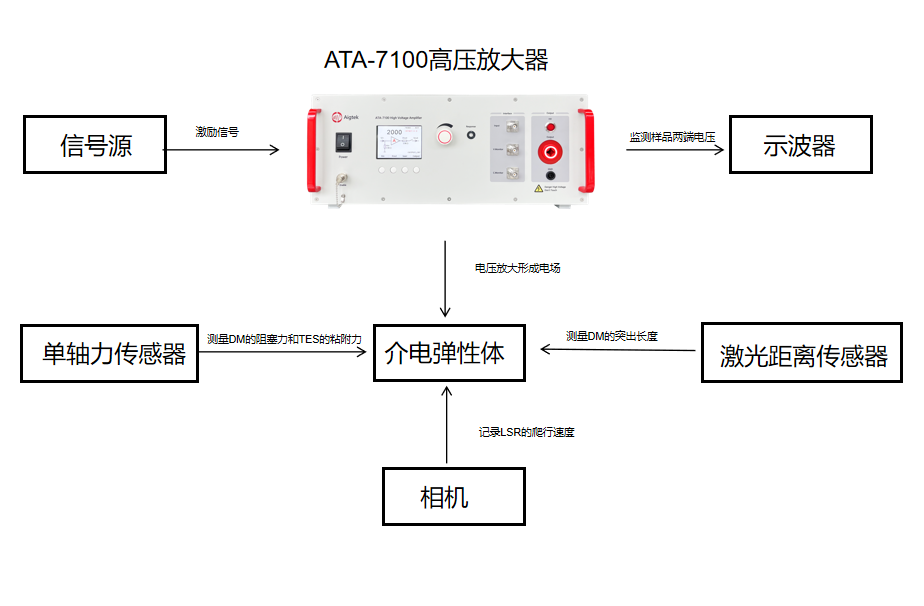
高压放大器在介电弹性体软体机器人中的应用

高压放大器在介电弹性体制成的软机器人研究中的应用
功率放大器在磁场激励下对狭窄非结构化液体环境适应性研究的应用

软智赋能,功放大有可为!Aigtek安泰电子亮相软体机器人大会!

全自动装车机器人在河南玉米装车中的应用
Aigtek安泰电子诚邀您莅临第十届软体机器人大会!

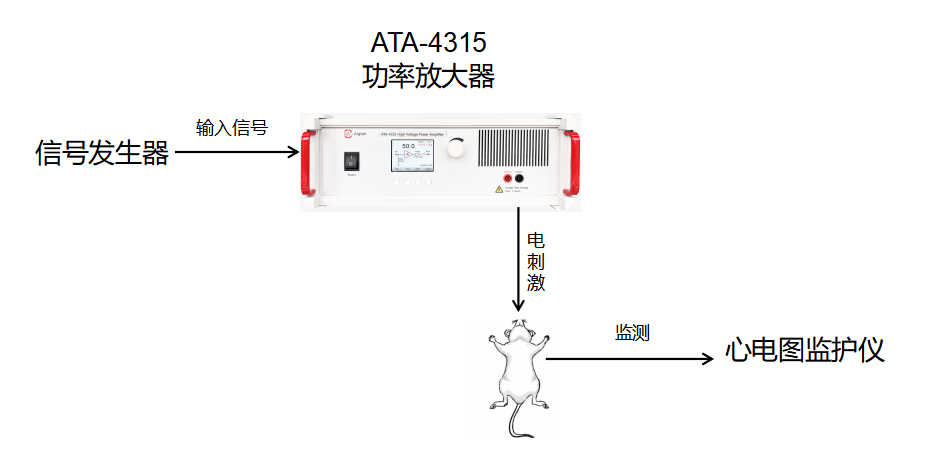
ATA-4315高压功率放大器:生物电刺激技术研究的高精度驱动核心
MATLAB 助力香港中文大学解决生物医学图像处理挑战
介电弹性体软机器人研究:高压放大器的应用实践

高压放大器在软体机器人研究中的应用

安泰高压放大器在微纳机器人研究中的应用介绍



评论