 思岚科技模块化自主定位导航SLAMWARE解决机器人避障问题
思岚科技模块化自主定位导航SLAMWARE解决机器人避障问题

如今,机器人已被广泛应用于餐厅、酒店、银行等各大服务场所,在人员复杂的场景中,对于机器人如何自由穿梭于人群是个很大的挑战,这需要涉及到机器人的自主定位导航技术,自主定位导航技术是机器人实现自主行走的重要标志,而避障又是实现自主定位导航的基本,它是指机器人在行走时,通过传感器感知到在其路线规划上存在的静态或动态障碍物,按照相应算法进行路径实时更新,最终绕开障碍物到达目标点。那机器人避障问题又该如何解决呢?
目前,在解决机器人避障问题中,市面上大多会采用到激光雷达传感器,激光雷达是机器人避障的重要传感器,它扮演着机器人“眼睛”的角色,可以实时感知周围环境信息,包括障碍物的尺寸、形状、位置、姿态等。
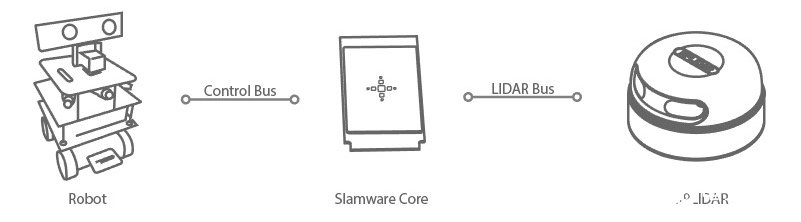
当然,如果仅靠激光雷达是无法达到理想中的效果,为此,思岚科技在几年前就推出了扮演机器人“小脑”角色的Slamware Core,一个控制机器人运动的核心中枢。对机器人来说,小脑可以绘制环境地图来指导自身行动,而如何在环境中找到一条从起点到终点,同时避开障碍物的最优路径显得更为困难。
思岚科技的模块化自主定位导航SLAMWARE内置基于激光雷达的同步定位与建图 (SLAM) 及配套的路径规划功能。同时,它也是思岚科技推出的服务机器人自主行走的全套解决方案之一。
相较于开源ROS机器人操作系统,SLAMWARE内置的SLAM算法构建出的地图更加精确,即使受到外界干扰也可以保持较高的定位精度。同时,SLAMWARE采用D*算法(即动态启发式路径搜索算法),机器人不预先录入地图,便可在陌生环境中行动自如,躲避动态障碍物。

通常来说,如果想让机器人胜任较为复杂场景的避障任务,除了激光雷达与SLAM算法外,还需要结合其他传感器作为补充。需涉及到超声波、深度摄像头、防跌落、防碰撞等多种传感器。但在实际应用中,传感器也并非越多越好,不合理的传感器组合不但会增加使用成本,还有可能导致各传感器之间产生互相干扰的情况。每种传感器的误差和噪音模型都存在区别,比如超声波传感器的测距精度和检出障碍物的方位精度远远低于激光雷达。
对不同传感器进行融合,提取出更加符合现实情况的检测数据,产品形态、与使用环境的适用性、及成本问题是不得不考虑的。
产品形态:传感器的选择本身也会受造型、运动特性等影响,比如一些防人的教育机器人,本身外形就小巧可爱,如果将一个体积较大的雷达放置其中,显然整体的美观度便会受影响的。
与使用环境的适用性:每种传感器都有其不同的特性,就激光雷达而言,假如将一个只有10米探测距离的激光雷达应用于工作环境远远大于10米的大场景中显然是不合适的。同样,如果机器人需要在黑暗环境中工作,只配备了只能接受可见光的视觉传感器也是不合适的。
成本:成本问题是制约定位导航技术普及的核心因素,当选用的传感器可以很好的满足上述指标后,成本便是决定其能否最终被选用的标准。历史上,由于激光雷达成本高昂,导致无法最终在实际产品中应用。近年来,国内低成本激光雷达的兴起,打破了我国长期被国外垄断的现象。
机器人避障是实现机器人自主行走的根本,解决机器人避障问题除了利用激光雷达作为核心传感器配合相应算法,还应做好多传感器的融合,否则很难达到理想的避障效果。
责任编辑:gt
-
传感器
+关注
关注
2578文章
55892浏览量
795745 -
机器人
+关注
关注
214文章
31691浏览量
224633 -
导航
+关注
关注
7文章
593浏览量
44134
发布评论请先 登录
从避障到定位:大禹电子M50如何赋能水下机器人全场景感知
基于米尔RK3576核心板的国产割草机器人解决方案
研华模块化电脑SOM-7583:通过模块化架构应对人形机器人应用挑战

赋能机器人“慧眼”:TMF8829 48x32 多区 dToF 传感器,定义避障新高度

禾赛科技与高仙机器人达成战略合作
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
集成MT6701磁编芯片的机器人关节模块化设计与驱动优化




评论