 dfrobot切诺基4WD移动机器人套件简介
dfrobot切诺基4WD移动机器人套件简介






产品描述
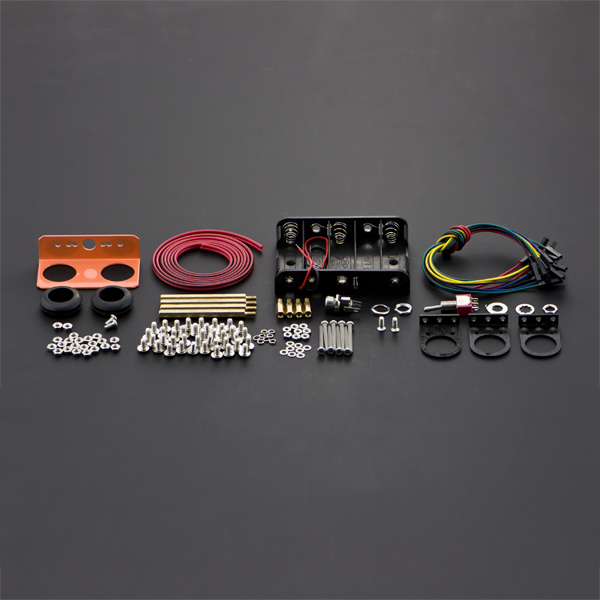
看过炫酷的切诺基4驱小车平台,是不是想尝试打造属于自己的机器人小车呢?现在DFRobot就为你准备了这款完备的基础套件。通过在切诺基上添加Romeo多合一主控器、超声波避障传感器和电源,然后烧录简单的程序,小车就可以实现自动避障的功能啦。搭配详细的教程,你完全不用担心学习的问题。
它不仅仅是一款有趣的小车,在组装、调试的过程中,你可以学习机械、电子、编程和智能算法等“高科技”。你会了解到原来科技和智能就在我们身边,你也可以学习和掌握它。
主控器采用新版的Bluno Romeo,集成了Arduino UNO R3、电机驱动、IO传感器扩展板和蓝牙4.0通讯模块,具备机器人的所有基本功能。因此玩家可以在上面添加各种传感器,从而具备更多学习潜力。
功能模式:
超声波扫描避障
选用Romeo Bluno蓝牙,(可结合蓝牙手柄,无线遥控)
注意事项:本套件以散件的形式提供,需要自行组装,相关文档中全面的组装和调试教程,以供参考。
技术规格
控制板: Bluno Romeo
微处理器: ATmega328P
板载类型: Arduino UNO
控制器工作电压: USB供电5V或者外部7~12V DC输入
超声波可测范围:4~500cm (分辨率为1cm)
舵机旋转角度量程:180°
组装后尺寸: 220mm*175mm*170mm
整机重量: 772g(不含电池)
最大载重: 500g
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6107浏览量
37204 -
DFRobot
+关注
关注
4文章
1166浏览量
12896
发布评论请先 登录
相关推荐
热点推荐
资料:移动机器人能否自动充电?
、餐饮服务行业已经应用到了机器人。不过目前,移动机器人都是使用高质量的机载可充电蓄电池组来给自身供电,但是一般只能维持几个小时,一旦电能耗尽,必须采用人工干预的方式来给机器人充电。如果采用人工充电,那么
发表于 01-20 09:39
Labview My RIO 移动机器人
初次使用 NI MyRIO控制器开发四轮全向移动机器人,由四个全向轮和直流电机与增量式编码器和NI 9001控制器组成,安装了红外距离和光电传感器。驱动板由官方提供的H桥驱动板。NI 9001由
发表于 08-21 12:20
机器人、协作机器人和移动机器人,你分的清楚吗
我觉得现在是时候讨论一些更有趣的话题,今天的话题是介绍工业机器人、协作机器人和移动机器人。我想每个人都知道机器人是什么。机器人是可怕的大型
发表于 10-30 11:33
如何实现移动机器人的设计?
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到传感器技术
发表于 11-23 15:08
请问怎么设计一种室外移动机器人组合导航定位系统?
怎么设计一种室外移动机器人组合导航定位系统?如何实现室外移动机器人组合导航定位系统的硬件设计?如何实现室外移动机器人组合导航定位系统的软件设计?
发表于 04-19 10:50
什么是移动机器人软硬件系统问题
接触了移动机器人这么久,我觉得应该写点什么东西,分享一下最基础的自己关于移动机器人的理解,也作为笔记总结,留到以后查阅。目前我还是觉得自己刚入门,有时候总想的太多,不如实践来的更直接,下面总结之前
发表于 08-06 06:13
差速移动机器人轨迹跟踪控制方法
差速移动机器人轨迹跟踪控制方法一、引言二·、基础准备1.去除GPS数据中的坏点2.经纬度与平面坐标系转换3.差速移动机器人数学建模三、基于PID的差分移动机器人轨迹跟踪方法1、控制律设计2、航向角
发表于 09-01 08:41
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
发表于 09-20 06:24

dfrobot海盗船4WD小车机器人套件介绍
看过炫酷的海盗4WD机器人移动平台,是不是想尝试打造属于自己的机器人小车呢?现在DFRobot就为你准备了这款完备的基础
dfrobotMiniQ 4WD教育机器人简介
本款小车为MiniQ 4WD教育机器人的“越野版”,底盘离地间隙由9mm调整为25mm,同时取消了5个巡线传感器,从而适应复杂的地形环境。





评论