 基于IntelAtom J1900处理器的机器人运动控制器
基于IntelAtom J1900处理器的机器人运动控制器

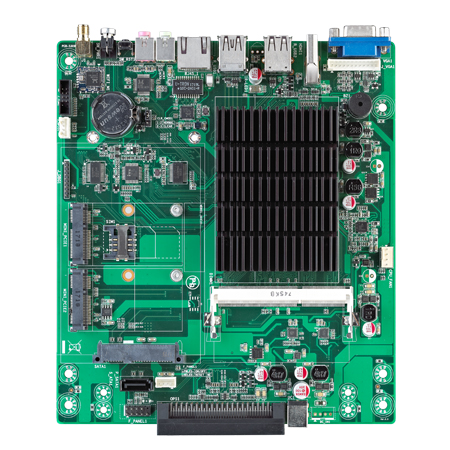
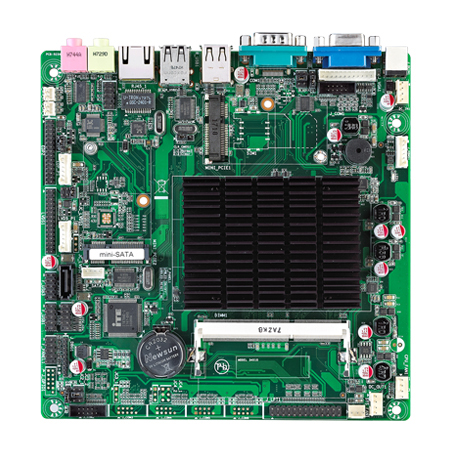
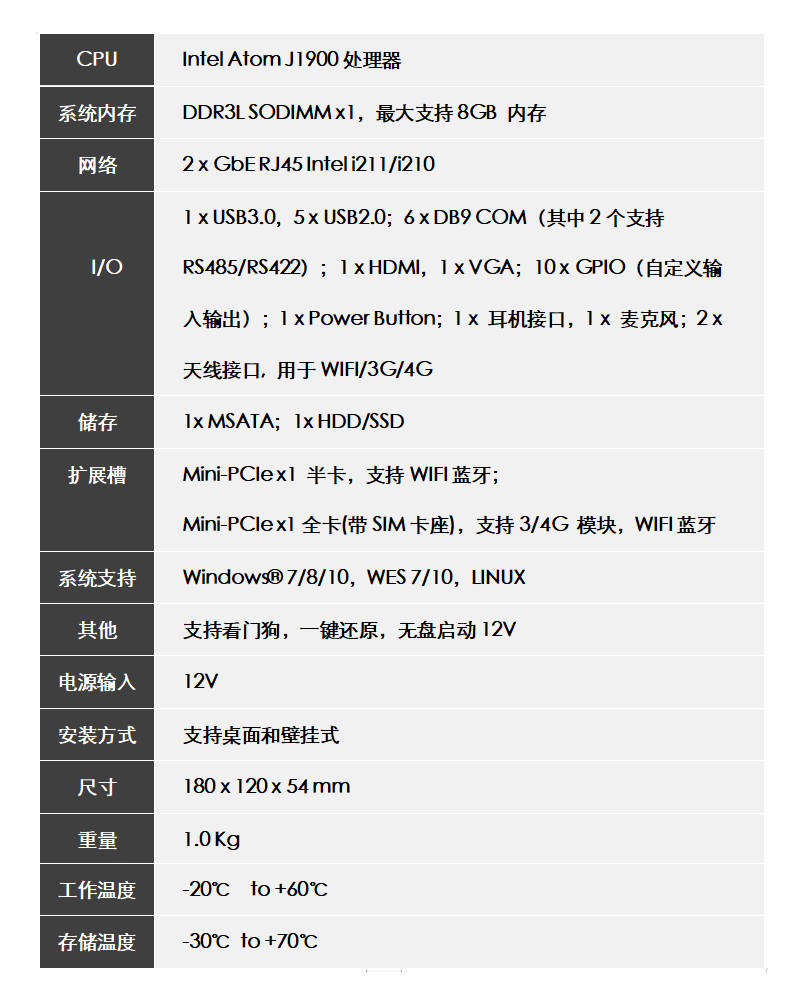
IntelAtom J1900 处理器;支持点位控制、直线插补、二维三维圆弧插补,螺旋线插补功能;插补方式:可选前加减速或后加减速方式;高速轨迹连续插补,速度平滑化处理; 定位确认,回程间隙,间隙补偿功能;梯形/S形对称加减速曲线、用户自定义每轴加减速时间。


IntelAtom J1900 处理器;
支持点位控制、直线插补、二维三维圆弧插补,螺旋线插补功能;
插补方式:可选前加减速或后加减速方式;
高速轨迹连续插补,速度平滑化处理;
定位确认,回程间隙,间隙补偿功能;
梯形/S形对称加减速曲线、用户自定义每轴加减速时间。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6107浏览量
37165 -
朗锐智科
+关注
关注
0文章
44浏览量
3081
发布评论请先 登录
相关推荐
热点推荐
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
推荐使用FET3568J-C工业级核心板作为机器人控制器的主控平台。
0****1
高性能处理器
飞凌嵌入式FET3568J-C核心板基于瑞
发表于 05-11 09:40
基于ARM处理器的吸尘机器人硬件设计
系统包括传感器模块,电机驱动模块,红外遥控接收模块、LED 指示灯和液晶显示模块。采用ARM Cortex-M3处理器作为机器人控制系统的核心,主要是低成本、小管脚数和低功耗,并且具有
发表于 11-06 16:01
如何设计智能灭火机器人控制器?
性能与可靠的机械控制性能的同时保证,才能在短时间内准确寻找到火源并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火机器人进行了设计。本文将从硬件和软件方面讲述智能灭火机器人
发表于 07-31 06:23
ARM处理器的机器人硬件设计方法
的焦点。目前市场上的吸尘机器人虽然也具有智能性,但大多由于结构不尽合理、通用性差、集成度高而导致成本高,不利于普及。在研究总结市场上相对成熟产品的基础上,基于ARM Cortex-M3处理器设计一款具备
发表于 05-20 06:12
求一种基于飞凌嵌入式FET3568J-C核心板的工业机器人控制器方案
推荐使用FET3568J-C工业级核心板作为机器人控制器的主控平台。01-高性能处理器飞凌嵌入式FET3568J-C核心板基于瑞芯微RK35
发表于 02-17 16:03
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现
嵌入式推荐使用FET3568J-C工业级核心板作为机器人控制器的主控平台。 01 高性能处理器 飞凌嵌入式FET3568J-C核心板基
发表于 02-24 17:05

信步科技OPS-J1900规格
Intel Bay Trail J1900处理器, OPS, 提供VGA, HDMI, 双屏异显, 板载Wifi上网模块, DC 12V供电
采用Intel Bay Trail J1900
信步科技SV1a-19012EP处理器规格
ntel Bay Trail J1900处理器, 2*COM, 2*Mini-PCIe, 支持双eDP显示, DC12V供电
采用Intel Bay Trail J1900处理器


RK3568与j1900参数对比
RK3568芯片和J1900芯片几乎是其中的代表。那么这两种芯片在哪些方面有所不同呢?这篇文章将分别就两种芯片的各项参数进行对比,为消费者提供一些选购参考。 性能对比: 在性能这一方面,RK3568处理器的运行速度更高,基于ARM架构设计,采用四核心
RK3568与J1900性能对比
了2.0GHz的四核Bay Trail架构和14nm工艺,最大功耗为10W。从架构和工艺上看,RK3568的处理器架构比J1900更新,工艺也更加先进
四核J1900嵌入式工控机的优势
的优势,可广泛为数字标牌、 汽车、数字控制、交互式客户端、媒体播放、广告、LCD 大屏、交通控制、信息 系统、 金融设备等众多领域提供解决方案。 Intel Atom J1900处理器



评论