 怎样控制步进电机
怎样控制步进电机

为什么要使用步进电机?
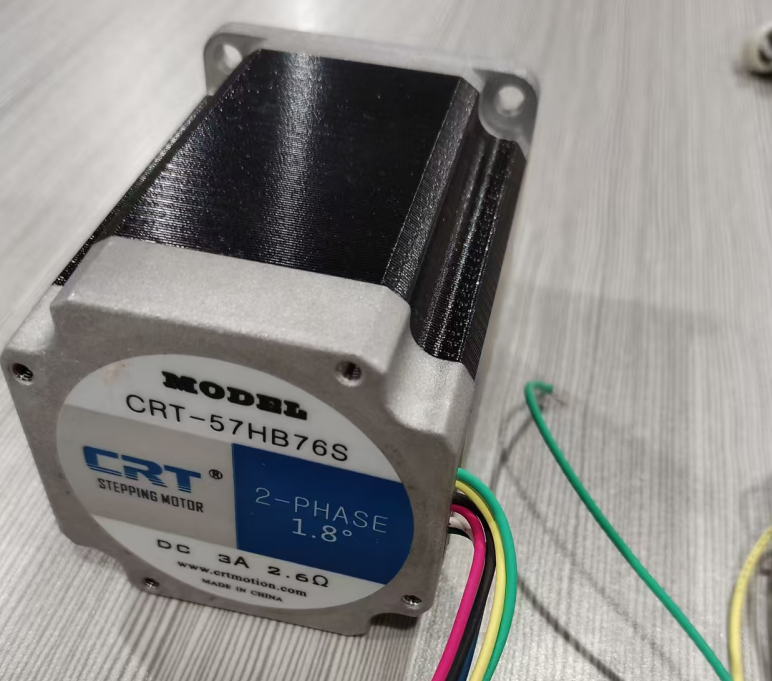
步进电机是带有许多内齿的无刷直流电机,通过周围的铜线圈磁性锁定到位。与无刷电机不同,为步进电源供电电机不会转动。相反,它锁定到给定输入指定的位置,顺时针或逆时针转一小步。
虽然这使得步进电机的驱动更加复杂,但与无刷直流电机相比具有一个主要优势:它们的角位置可以非常精确地指定。例如,如果您希望电机正好旋转270度,那么使用普通直流无刷电机(没有某种形式的反馈)几乎是不可能的,但使用步进电机会很轻松。
步进电机需要多个步进脉冲才能到达您想要的位置。此外,步进电机线圈始终通电,大大增加了保持转矩,但强制转动则很困难。这些优势解释了为什么步进电机常用于许多应用,包括CNC机床和CD/DVD驱动器。
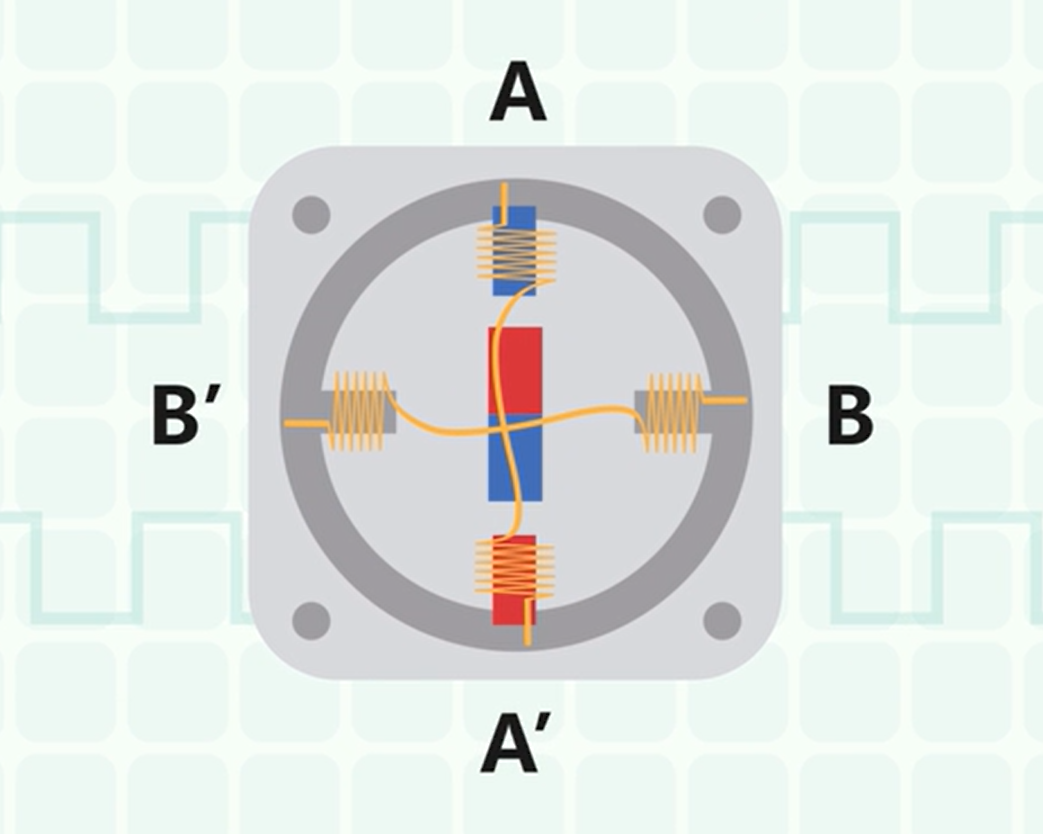
步进电机电动机分为两个阶段:单极和双极。单极电机包含连接所有线圈的公共电源,而双极电机具有分离的线圈。
本文仅介绍单极电机,因为双极电机需要以不同的方式驱动。
由Digikey提供(原理图)
单极输入和步进
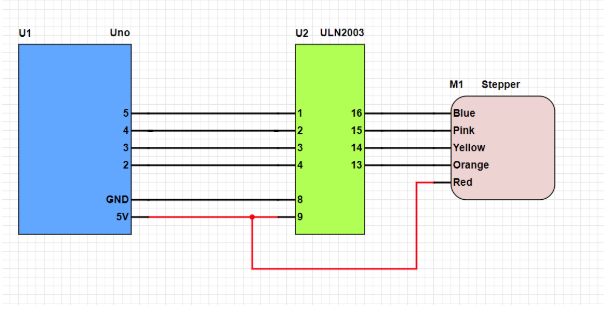
单极电机通常有5根输入线 - 两根成对线控制线圈,第五根线连接到为每个线圈提供公共分接头。
虽然线路颜色因电机而异,但这里有连接在本文中使用:

下表显示了如何驱动每个输入以旋转电机。向前移动(即从步骤1到2)使电机顺时针转动,而向后移动则使电机逆时针转动。

表1.电机旋转状态
步进电机可能需要的电流远远超过微控制器的限制,这就是微控制器必须从不直接连接到电机的原因。电机还可能产生反电动势,可能会损坏I/O端口,并且绝对必须使用钳位二极管。
然而,驱动带有四个分立晶体管的步进电机会浪费和笨重,这就是为什么必须使用ULN2003步进驱动器IC 。该IC包含七个达林顿晶体管,每个晶体管都包含二极管保护,能够提供500mA,50V输出(实际上比Arduino Uno可以处理的更多)。
编码步进电机
步进电机的编码步骤可以通过switch语句和一些I/O位完成,但有一种更简单的方法:使用内置的Stepper Library!
虽然Arduino是一个方便而简单的平台,但它的库支持使它成为最好的平台之一市场上的模块通过Arduino库兼容。对于步进电机,我们可以使用步进器库轻松控制它们,无需对每一步进行编码。
#include
#define STEPS_PER_REV 513
// Create our stepper motor object
Stepper motor(STEPS_PER_REV, 2, 3, 4, 5);
void setup() {
motor.setSpeed(10); // Motor speed of 10 RPM
}
void loop()
{
motor.step(STEPS_PER_REV); // Step clockwise one whole revolution
motor.step(STEPS_PER_REV / 2); // Step clockwise half revolution
motor.step(-STEPS_PER_REV); // Step counter clockwise one whole revolution
}
要使用步进电机库我们首先要包括步进电机库头:
#include
下一步(可选但推荐)是定义电机在一整圈内旋转的步数。本教程中使用的电机有32个步骤,并连接到比率为1:16的减速齿轮,因此一次旋转的步数为513.
#define STEPS_PER_REV 513
现在我们有了定义的步数,我们需要创建一个步进电机对象。该对象初始化为五个变量:每转的步数和连接步进电机的四个引脚。
Stepper motor(STEPS_PER_REV, 2, 3, 4, 5);
在设置功能中,我们可以定义速度(以RPM为单位)我们希望我们的电机转动。对于这个例子,我们将RPM设置为10.
void setup() {
motor.setSpeed(10); // Motor speed of 10 RPM
}
主循环包含转动电机所需的代码。正数表示电机等于前进的次数,而负数表示电机向相反方向旋转。
此示例中的三行代码显示STEPS_PER_RPM如何用于将电机转动已知量。
motor.step(STEPS_PER_REV); // Step clockwise one whole revolution
motor.step(STEPS_PER_REV / 2); // Step clockwise half revolution
motor.step(-STEPS_PER_REV); // Step counter clockwise one whole revolution
-
步进电机
+关注
关注
153文章
3277浏览量
152925 -
Arduino
+关注
关注
191文章
6534浏览量
197661
发布评论请先 登录
步进电机控制方案中驱动板的核心作用与技术解析
步进电机的位置控制与速度控制

怎样判断步进电机是否坏了?
步进电机驱动器的作用介绍

步进电机发热问题及对策
DRV8821 双路步进电机控制器与驱动器技术文档总结
DRV8711 步进电机控制器技术文档总结





评论