 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
该项目演示了如何快速制作一个简单的 WiFi 遥控 4 轮移动机器人,该机器人具有安装在伺服驱动的平移和倾斜组件上的板载 WiFi 摄像头。
该项目使用基于 CASP 模型的编程工具来完成软件实现。 htm
程序
步骤 1. 按照下面“硬件开发”部分中的描述构建硬件。请注意,本项目推荐使用 CASP 0.9.5.1 及以上版本。
第 3 步:在此链接https://aadhuniklabs.com/casp/casp_web_projects/robotics/01_rc_robot.zip下载关于“带车载摄像头的基本遥控移动机器人”的示例项目,并按照“软件开发”中提到的步骤进行操作部分。
第 4 步:可能需要按照“调整”部分所述进行一些调整,以调整软件以匹配您开发的硬件。
第 5 步:最后,控制移动流动站的键盘和鼠标控件在控制方法部分进行了描述。您可以更改本机模型中“rc_control”自定义块中的代码,以根据您的喜好修改控制键。请通过https://aadhuniklabs.com/contact写信给我们,了解与该项目相关的任何疑问和建议。
硬件开发
四个直流电机与轮子一起安装在合适的金属底架上。平移和倾斜组件(配备两个微型伺服系统)安装在基架的合适位置(最好朝向机器人基架的后端)。12V 电池安装在底架下方。所需的电子模块适当地放置在底架上,并按照“示意图”部分所示的连接图进行连接。典型布置如下图所示。
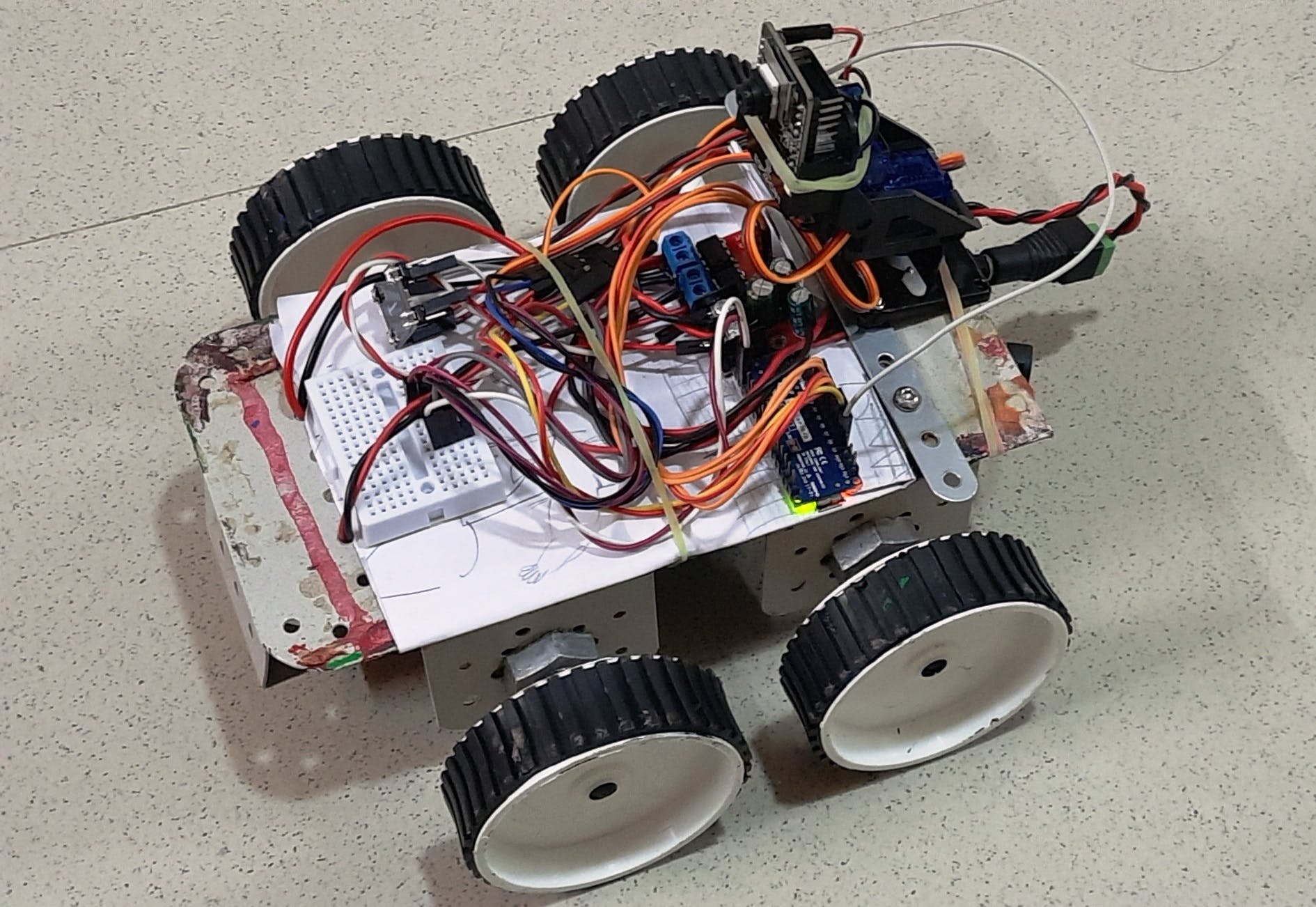
电子部分由 Arduino Nano RP2040 Connect 或 Raspberry Pi Pico W 或 ESP32 组成,用作主要微控制器,用于控制所有必需的机器人功能并通过板载 WiFi 与主机 PC 通信。
ESP32-CAM 模块上的闪光灯在弱光条件下通过 Arduino Nano RP2040 微控制器从主机 PC 手动控制。
6V 至 12V 电池用于为机器人上的整个电路供电。6V/12V 至 5V DC 降压转换器用于提供所需的 5V 电源,为微控制器、伺服系统和 ESP32 摄像头模块供电。
软件开发
A)配置 ESP32 摄像头
在项目中使用 ESP32 摄像头之前,应使用有效的 IP 地址对其进行正确编程。有关如何对模块进行编程的详细信息,请参阅我们的ESP32-CAM 示例。用户还可以参考 Internet 上有关此主题的丰富资料。
CASP 软件用于为 Arduino 微控制器目标和主机 PC 快速开发模型。因此,开发了两种模型以实现预期目标。
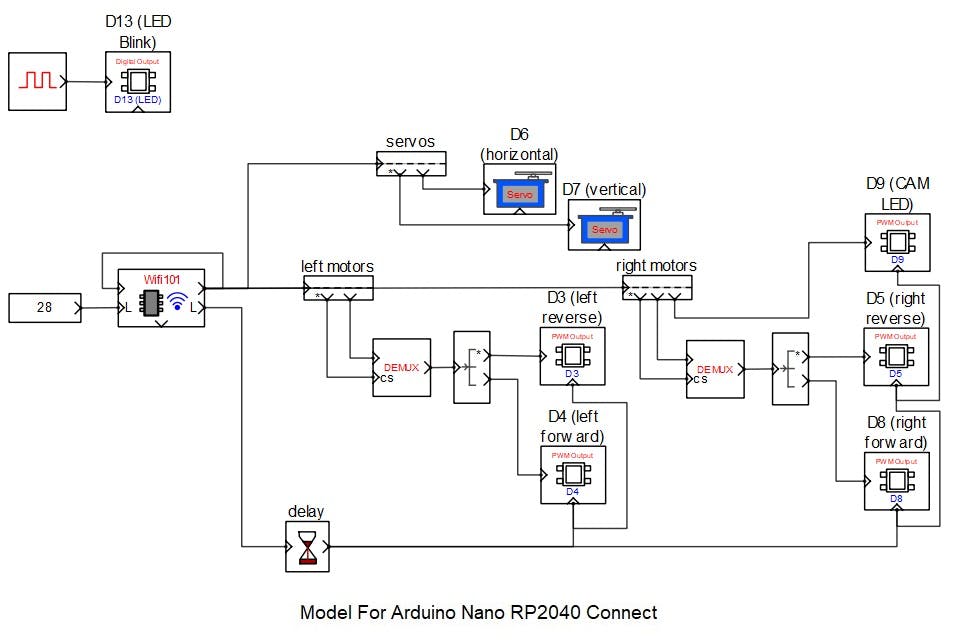
B)在 Arduino Nano RP2040 Connect、Raspberry Pi Pico W 和 ESP32 上运行的目标模型包括
1. 表示系统正在运行的闪烁逻辑。
2. WiFi101 块从主机 PC 接收所需的控制信号。
3. 映射到微控制器引脚的 PWM 和伺服模块。
4. 延时块,用于在通信错误期间或主机未连接时重置 PWM 块的输出。
以下是正确编程目标板的步骤。ESP32 Camera 的 IP 地址应在此块的块参数中输入。它还配置为输出键盘和鼠标信号。
3. RC 控制块:自定义块,接收来自图像显示块的键盘和鼠标信号,并产生合适的控制信号来控制机器人运动和头部(云台)运动。
4. 通过 WiFi 通信通道映射到目标模型的 GPIO 块。
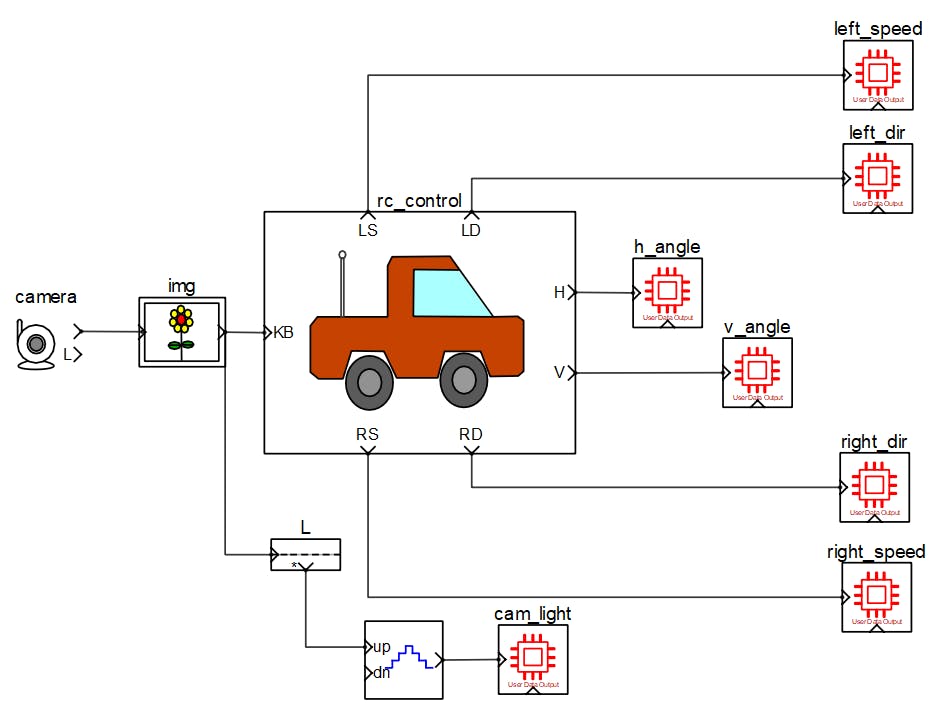
以下是在主机PC上运行本机模型的步骤
1. 在继续之前,主机 PC 应连接到与设备连接的同一网络。
2. 加载“rc_native”项目。
3. 点击Home->Simulation->Configure Simulation IO 菜单项。
4. 将打开“配置仿真硬件”窗口。在 Native Nodes 和 GPIO Device Nodes 下,将下图中标记的 IP 地址(通过双击该项)更改为各自的本地和设备 IP 地址。
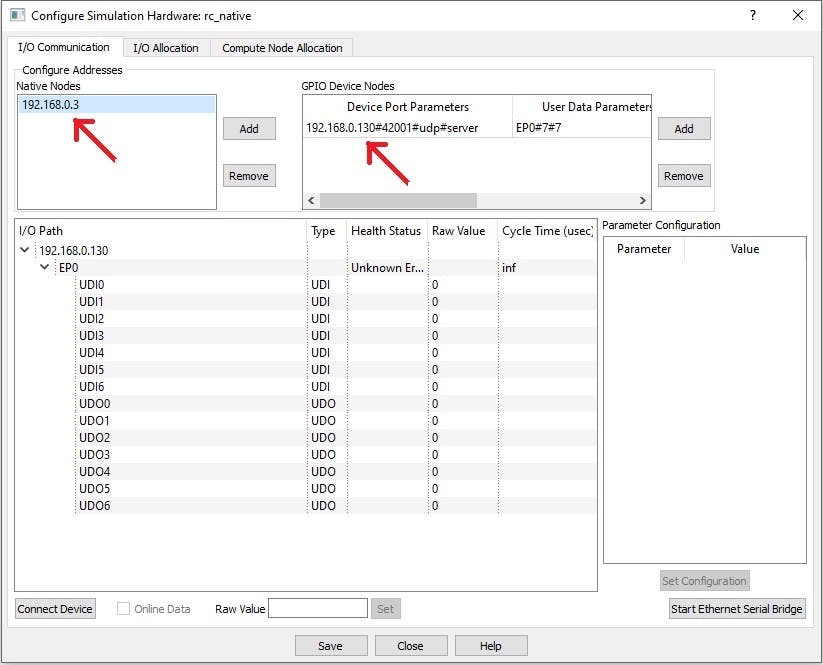
。
调整
1. 当按下 W 和 S 时,轮子电机连接可以反转以向前或向后移动。
2. 开发了电机正反转产生逻辑,以配合项目中使用的电机驱动IC ieTA6586。如果使用其他驱动IC,用户可以适当修改逻辑。
3. 对于 rc_control 块参数中指定的默认角度,伺服电机可能需要进行一些对齐以面向机器人前进方向。
4. 基本速度、速度限制和其他与导航相关的参数可从 rc_control 块参数中调整。
控制方法
1. 上面显示的模拟面板窗口在激活时接受键盘和鼠标输入。
2. 用户可以使用键盘按键W——向前移动,S——向后移动,A——以中心向左旋转,D——以中心向右旋转。
3. 组合键W/S & A/D 可以在前进或后退时左右转弯。
4. 可以使用Page Up & Page Down 键调整速度。
5. 头部位置控制的垂直和水平伺服角度(从-90 到+90 度)可以通过鼠标移动来控制。
6. 键“G”用于将两个舵机定位在默认角度。
7. 键“L”用于打开/关闭 ESP32 相机的闪光 LED 灯。
- 如何制作Arduino智能移动机器人
- 移动机器人路径规划与运动控制 12次下载
- 如何使用Matlab和VR技术实现移动机器人的建模和仿真 13次下载
- 移动机器人的导航定位和地图构建技术综述 22次下载
- 移动机器人的关键技术有哪些 17次下载
- 如何使用单目视觉实现移动机器人的导航方法 20次下载
- 如何才能实现移动机器人的导航定位和地图构建技术 22次下载
- 如何通过测程法进行四轮全向移动机器人定位 13次下载
- 使用Matlab和VR技术实现移动机器人的建模及仿真的方案说明 10次下载
- 移动机器人技术及其分类和空间定位技术详解 16次下载
- 移动机器人的分类与移动机器人技术研究现状和未来发展的分析 13次下载
- 移动机器人导航 5次下载
- 轮式移动机器人WMR的运动分析 33次下载
- 基于遥操作和局部自主的移动机器人越障
- 基于达芬奇的移动机器人开发平台设计
- 智能移动机器人系统方案指南 482次阅读
- 用于ROS移动机器人高集成电源解决方案(一) 1123次阅读
- 采用Mecanum式全向移动轮及模块化实现全方位移动机器人设计 3273次阅读
- 基于ARM处理器和CPLD技术实现智能移动机器人系统设计 1159次阅读
- 移动机器人是如何定位的 4526次阅读
- 移动机器人控制系统的发展方向 1529次阅读
- 移动机器人控制系统设计与仿真 3642次阅读
- 仙知机器人自主研发用于移动机器人应用专业级客户端软件Roboshop 6250次阅读
- 移动机器人的机构与分类分析 8268次阅读
- 拆解移动机器人视觉算法 5662次阅读
- 如何区分机器人、协作机器人和移动机器人? 7030次阅读
- 关于被动同心转向式多履带全向移动机器人的设计 9148次阅读
- 自主移动机器人的定位与地图创建(SLAM)关键性问题 1986次阅读
- 基于FPGA技术的全方位移动机器人运动控制系统的方案设计 1243次阅读
- 小生境遗传算法的移动机器人路径优化技术 1254次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论