 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
在这篇文章中,我们将使用 ROS Melodic 与 Bittle 执行远程操作 - 来自 Petoi 的机器狗,目前在 Kickstarter 上。
即使您不打算购买 Bittle,如果您正在寻找有关如何为 ROS 编写自定义驱动程序以与机器人硬件交互并控制机器人运动的信息,本文仍然可能对您有用。我们先谈谈选项一。
Bittle 已经有一个负责运动和平衡的微控制器 - ATMega328。
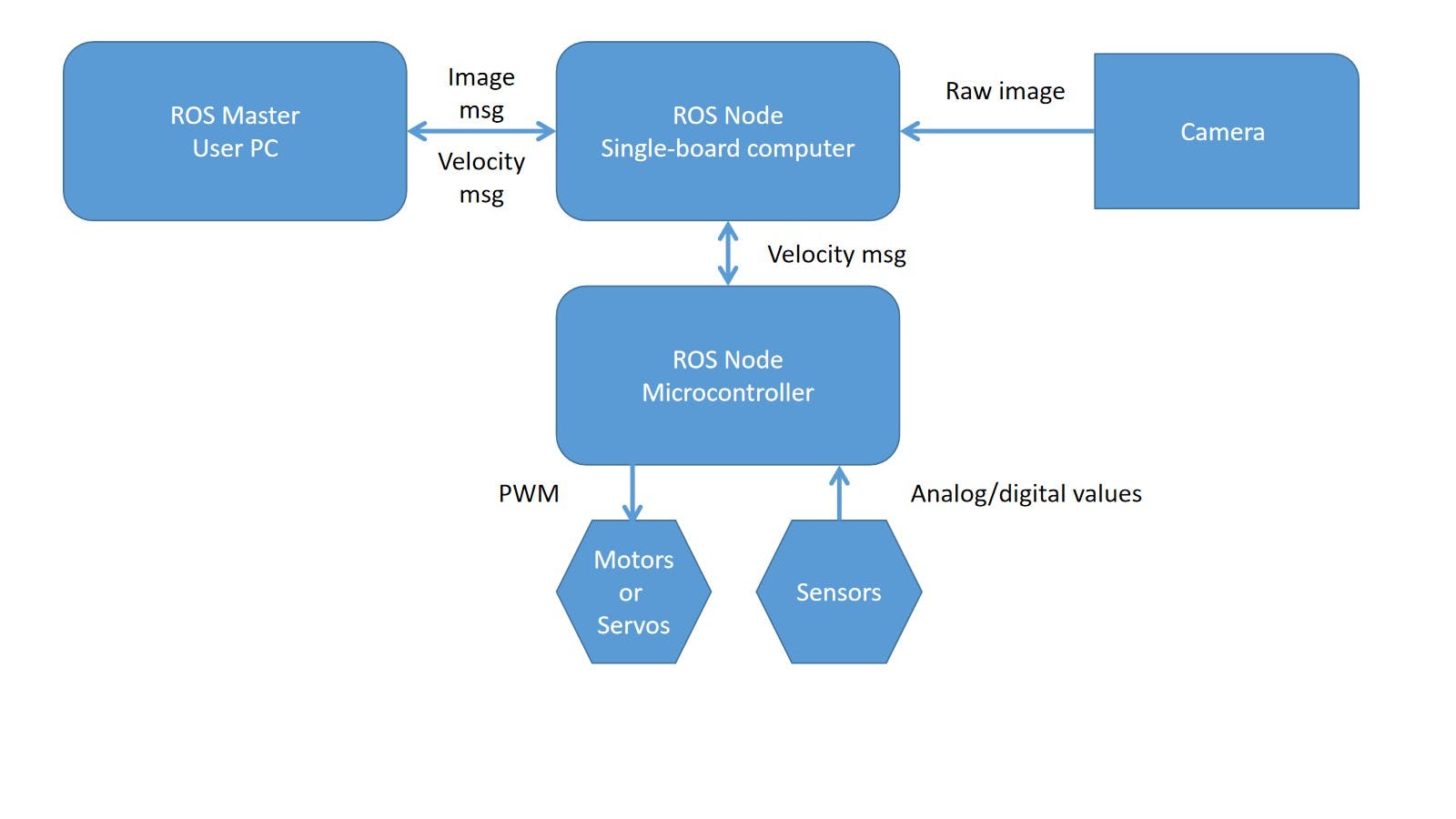
可以使用 ros_arduino_bridge 包直接在微控制器芯片上运行 ROS 节点,但是这种方法有一些缺点。首先,ATMega328 上剩余的内存量可能不足以同时稳定运行运动算法和 ROS 节点。其次,ATMega328没有无线接口或图像处理能力,所以无论如何我们都需要将它与单板计算机耦合以进行远程操作。
这将我们带到了选项 2 。
。简而言之,这就是它的工作方式。现在让我们来看看细节。
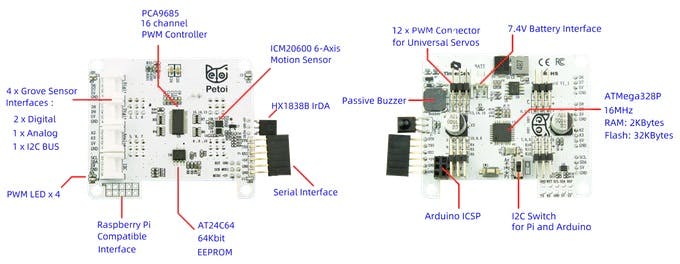
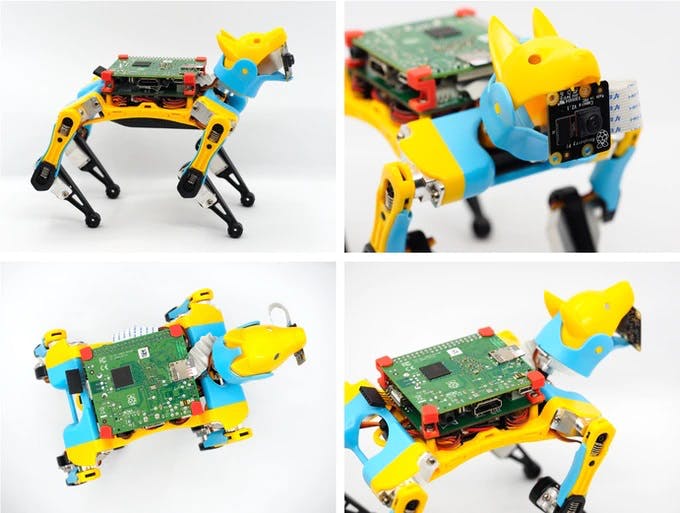
有两种 SBC 推荐用于 Bittle - Raspberry Pi 3A+ 或 Raspberry Pi Zero。Raspberry Pi 4 和 3B+ 是兼容的,但尺寸尺寸对于 Bittle 紧凑的机身来说太大了。我们将在这个项目中使用 Raspberry Pi 3A+ - 它非常适合 NyBoard。

。
原因是这些接头具有用于 TX/RX 引脚的电平转换器 - Raspberry Pi 在 UART 接口上具有 3.3V,而 Arduino 板通常具有 5V。
现在,当我们有硬件连接和 Raspbian 与 ROS 时,我们需要为机器人编写一个自定义驱动程序。
安装 catkin 构建工具,创建一个 catkin 工作空间并将我的 GitHub 存储库为此项目克隆到 src 文件夹中。
sudo pip install -U catkin_tools
!确保从您的 catkin 工作区 src 文件夹中执行以下命令!
git clone https://github.com/AIWintermuteAI/bittle_ROS.git
移回 catkin 工作区文件夹并构建您刚刚从 Gtihub 克隆的包
catkin build
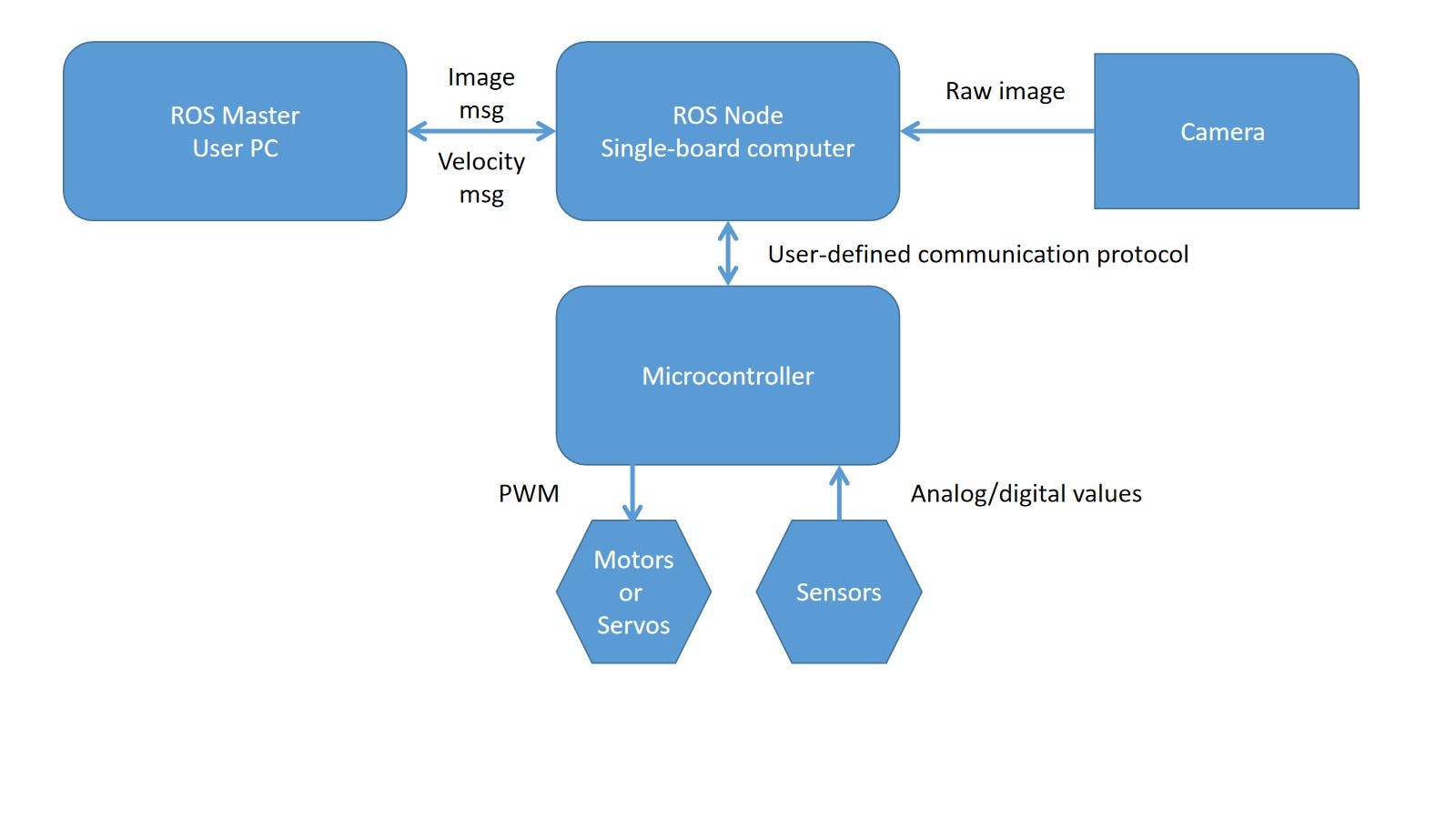
让我们看一下存储库内容。与 NyBoard 交互的驱动程序位于 scripts 文件夹中。它是一个简单的节点,订阅了关于 cmd_vel 主题的 Twist 消息。
def __init__(self, port='/dev/ttyS0'):
self.dir = 0
rospy.init_node('cmd_vel_listener')
rospy.Subscriber("/cmd_vel", Twist, self.callback)
self.ser = serial.Serial(
port=port,
baudrate=57600,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
bytesize=serial.EIGHTBITS,
timeout=1
)
Twist 消息中有 6 个分量 - 3 轴的线速度和角速度。
rospy.loginfo("Received a /cmd_vel message!")
rospy.loginfo("Linear Components: [%f, %f, %f]"%(msg.linear.x, msg.linear.y, msg.linear.z))
rospy.loginfo("Angular Components: [%f, %f, %f]"%(msg.angular.x, msg.angular.y, msg.angular.z))
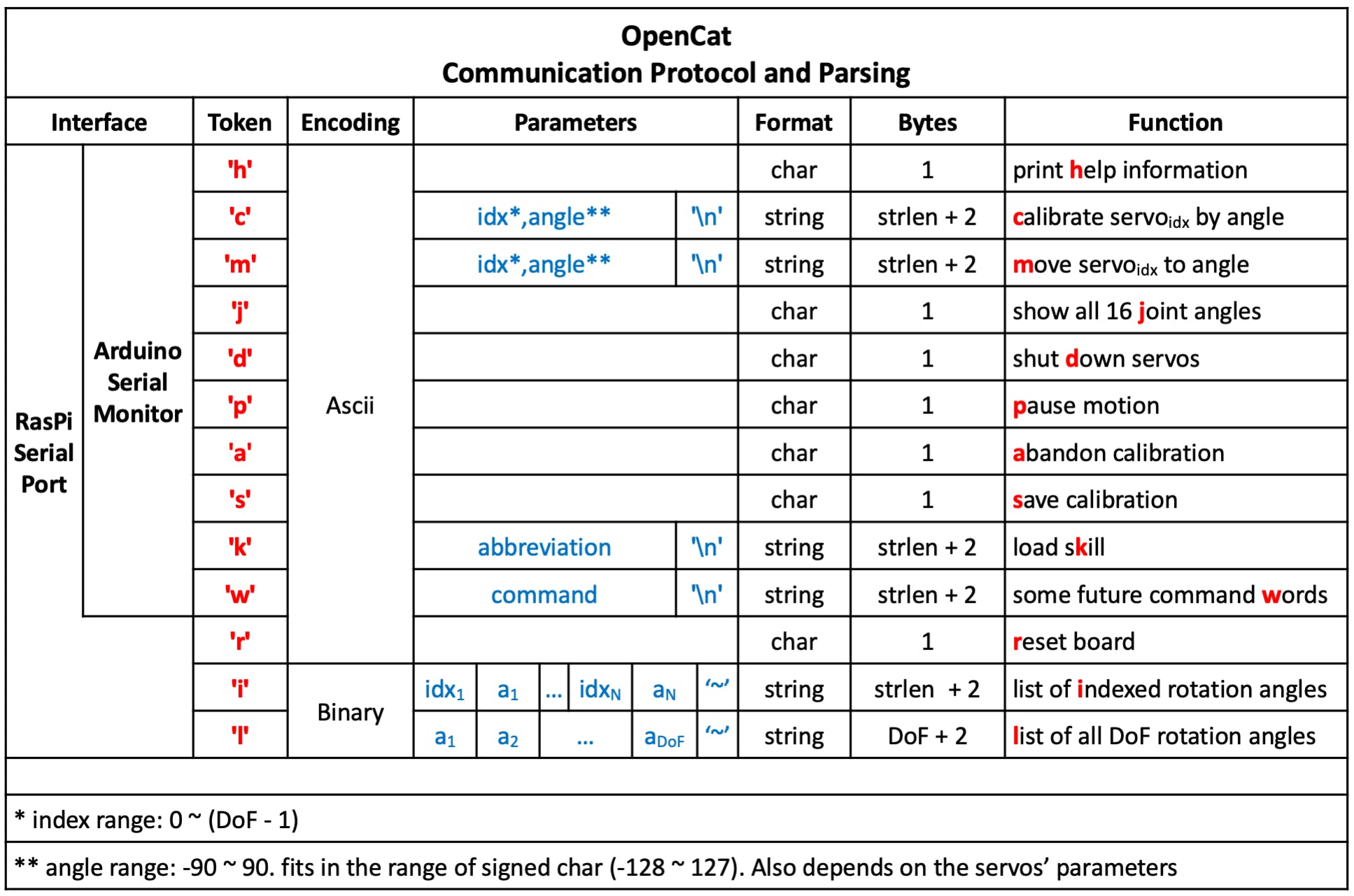
在我们的例子中,我们只关心线性 x 速度(向前和向后)和角 z 速度(左和右)。收到消息后,我们使用 PySerial 使用内置通信 API 与 BIttle 进行通信。
if msg.linear.x > 0:
dir = 1
elif msg.linear.x < 0:
dir = -1
elif msg.angular.z > 0:
dir = 2
elif msg.angular.z < 0:
dir = 3
else:
dir = 0
if self.dir != dir:
self.wrapper([dir_dict[dir],0])
self.dir = dir
为了简单起见,我们将只启用基本的步行 - 可以通过串行直接将伺服角度发送到微控制器,但在这种情况下,陀螺仪和加速度计将不会用于平衡。
带有陀螺仪/加速度计平衡的细粒度伺服角度控制并不容易,但由于 BIttle 软件是开源的,并且未来将发布 ESP32 控制器板(能够运行 ROS 节点和运动协调算法),我认为这是可以实现的。这将大大提高 Bittle 穿越各种障碍的能力。
在存储库文件夹中,您还将找到两个启动文件 bittle_teleop_robot.launch 和 bittle_teleop_server.launch。启动文件在 ROS 中用于方便地启动大型机器人设置。Teleop 启动文件机器人将同时启动机器人驱动程序和 USB 摄像头驱动程序。要在您的 Ubuntu 计算机上执行的服务器启动文件将启动 rqt_robot_steering 和 RVIZ,并打开图像视图。
通过在 Ubuntu 计算机和 Raspberry Pi 上导出 ROS_MASTER_URI 和 ROS_IP 环境变量,将 ROS 设置为在多台机器上工作。
在您的 Ubuntu 计算机上:
export ROS_MASTER_URI=http://[your-ubuntu-computer-ip-here]
export ROS_IP=[your-ubuntu-computer-ip-here]
在树莓派上:
export ROS_MASTER_URI=http://[your-ubuntu-computer-ip-here]
export ROS_IP=[your-raspberry-pi-ip-here]
ROS_MASTER_URI 将指向您的 Ubuntu 计算机,该计算机将运行 roscore,并且 ROS_IP 需要设置为同一网络上机器各自的 IP 地址。
请记住获取您的 catkin 工作区并将 pi 用户添加到 dialout 和 tty 组 - 这是 PySerial 能够打开串行连接所必需的。由于 ROS Melodic 默认仍使用 Python 2.7,并且驱动程序脚本配置为使用您的系统 Python 3,因此您可能会收到导入错误 - 在这种情况下,请使用 pip install 安装必要的包。通常只需要安装 rospkg:
pip install rospkg
完成后,在 Ubuntu 计算机上启动 bittle_teleop_server.launch,然后在 Raspberry Pi 上启动 bittle_teleop_robot.launch。
移动滑块让机器人移动!如果您使用的机器人与 Bittle 不同,则在接收到速度消息后要执行的确切代码需要与您的设置相匹配,尤其是在接收到速度消息后的这部分
if msg.linear.x > 0:
dir = 1
elif msg.linear.x < 0:
dir = -1
elif msg.angular.z > 0:
dir = 2
elif msg.angular.z < 0:
dir = 3
else:
dir = 0
if self.dir != dir:
self.wrapper([dir_dict[dir],0])
self.dir = dir
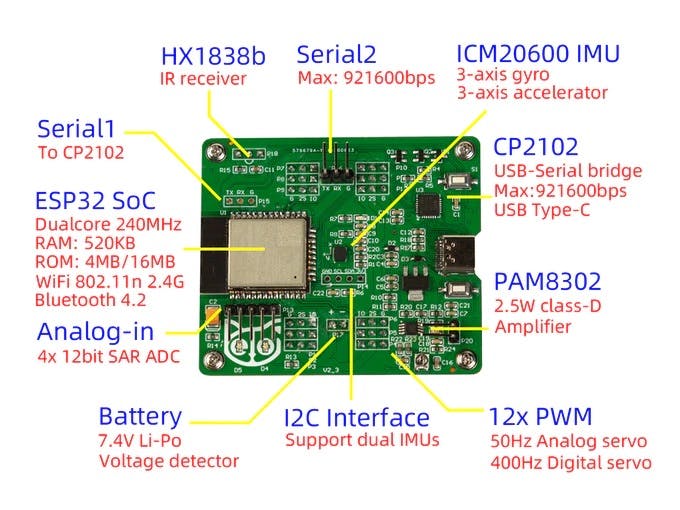
距离 Kickstarter 活动结束还有时间,所以看看 Bittle 以及它在项目 Kickstarter 主页上的功能。如果您打算将 Bittle 与 ROS 一起用于更高级的机器人项目,请考虑支持BiBoard V0 ,它具有更强大的控制芯片、具有 520 Kb RAM 和 16 Mb ROM 的 ESP32。
希望本文对您了解更多有关 ROS 机器人驱动程序的信息有所帮助。
如果您有任何问题,请在LinkedIn上添加我,并订阅我的 YouTube 频道,以获得有关机器学习和机器人技术的更多有趣项目的通知。
- 使用Raspberry PI和open CV进行图像处理
- 使用Raspberry Pi和BluPants进行编码
- 通过USB对Raspberry Pi进行编程
- Arduino和Raspberry Pi平台进行编码
- 使用Raspberry Pi的Sphero RVR低延迟远程操作
- 使用Raspberry Pi进行汽车诊断
- 远程编程Raspberry Pi Pico
- 使用Bittle和Raspberry Pi 4的ROS SLAM
- Raspberry Pi和你的仓鼠进行股市交易
- 使用Raspberry Pi和Arduino进行花卉监测
- 可视频直播的Raspberry Pi网络控制机器人 14次下载
- 《爱上Raspberry Pi》中译版-电子书籍.pdf 0次下载
- Instant Raspberry Pi Gaming 6次下载
- Raspberry_Pi详解 16次下载
- raspberry_pi各版本差别 0次下载
- 基于Raspberry Pi 5的蜂窝物联网项目 1312次阅读
- 使用Raspberry Pi Pico W和MicroPython开发物联网应用 2180次阅读
- 用于测试项目的4个最佳树莓派Raspberry Pi模拟器 6823次阅读
- 如何使用Raspberry Pi使热水浴缸变得智能和远程操作 1985次阅读
- 如何通过Raspberry Pi设置CE电流监视器 2342次阅读
- 基于树莓派产品 Raspberry Pi微控制器板的优缺点 2984次阅读
- 基于Raspberry Pi Pico开发先进的家庭自动化系统 3004次阅读
- 基于FONA通过UART与Raspberry Pi进行通讯的方案介绍 2257次阅读
- 微雪电子ZeroW| Raspberry Pi ZeroW主板简介 2618次阅读
- 微雪电子Raspberry Pi 3 Model主板简介 3145次阅读
- 微雪电子Raspberry Pi 3 Model扩展板简介 1667次阅读
- 利用Raspberry Pi构建存储和虚拟化时间序列数据 952次阅读
- 一文了解Raspberry Pi 4各项性能跑分 3w次阅读
- ROS程序是如何控制伺服机的 所有答案尽在本文 3148次阅读
- 视觉享受!用Raspberry Pi实现圣诞树灯光秀 8344次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1NB-IoT芯片厂商的资料说明
- 0.31 MB | 22次下载 | 1 积分
- 2智慧监狱建设的核心终端—智慧监仓屏
- 0.25 MB | 2次下载 | 免费
- 3PC318C016M/D 200V半桥栅极驱动器技术手册
- 0.77 MB | 2次下载 | 免费
- 45.0SMDJ200A单向TVS瞬态抑制二极管规格书
- 0.88 MB | 1次下载 | 免费
- 5PC318C041EQ 200V半桥栅极驱动器技术手册
- 0.50 MB | 次下载 | 免费
- 6PC318C042NM 200V半桥栅极驱动器技术手册
- 0.55 MB | 次下载 | 免费
- 7技嘉H110主板IT8628E_BX IO电路图资料
- 2.61 MB | 次下载 | 1 积分
- 8H110主板CPU PWM芯片ISL95858HRZ-T核心供电电路图资料
- 0.63 MB | 次下载 | 1 积分
本月
- 1元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 241次下载 | 免费
- 2元宇宙底层硬件系列报告
- 13.42 MB | 184次下载 | 免费
- 32022 年展望報告 – 半導體產業
- 1.43 MB | 136次下载 | 免费
- 4晶振与滤波器应用电路《电子工程师必备:元器件应用宝典》
- 1.57 MB | 90次下载 | 免费
- 5汽车电子行业深度解析:智能化与电动化方兴未艾
- 6.47 MB | 71次下载 | 免费
- 6中国DPU行业白皮书
- 23.80 MB | 37次下载 | 免费
- 7晶科鑫代理线-微盟电子2021年度产品目录选型手册
- 14.75 MB | 27次下载 | 免费
- 8NB-IoT芯片厂商的资料说明
- 0.31 MB | 22次下载 | 1 积分
总榜
- 1matlab软件下载入口
- 未知 | 935137次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420064次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233089次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191425次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183352次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81602次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73822次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65991次下载 | 10 积分





 工商网监
工商网监
评论