 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
该项目的最终结果如下:
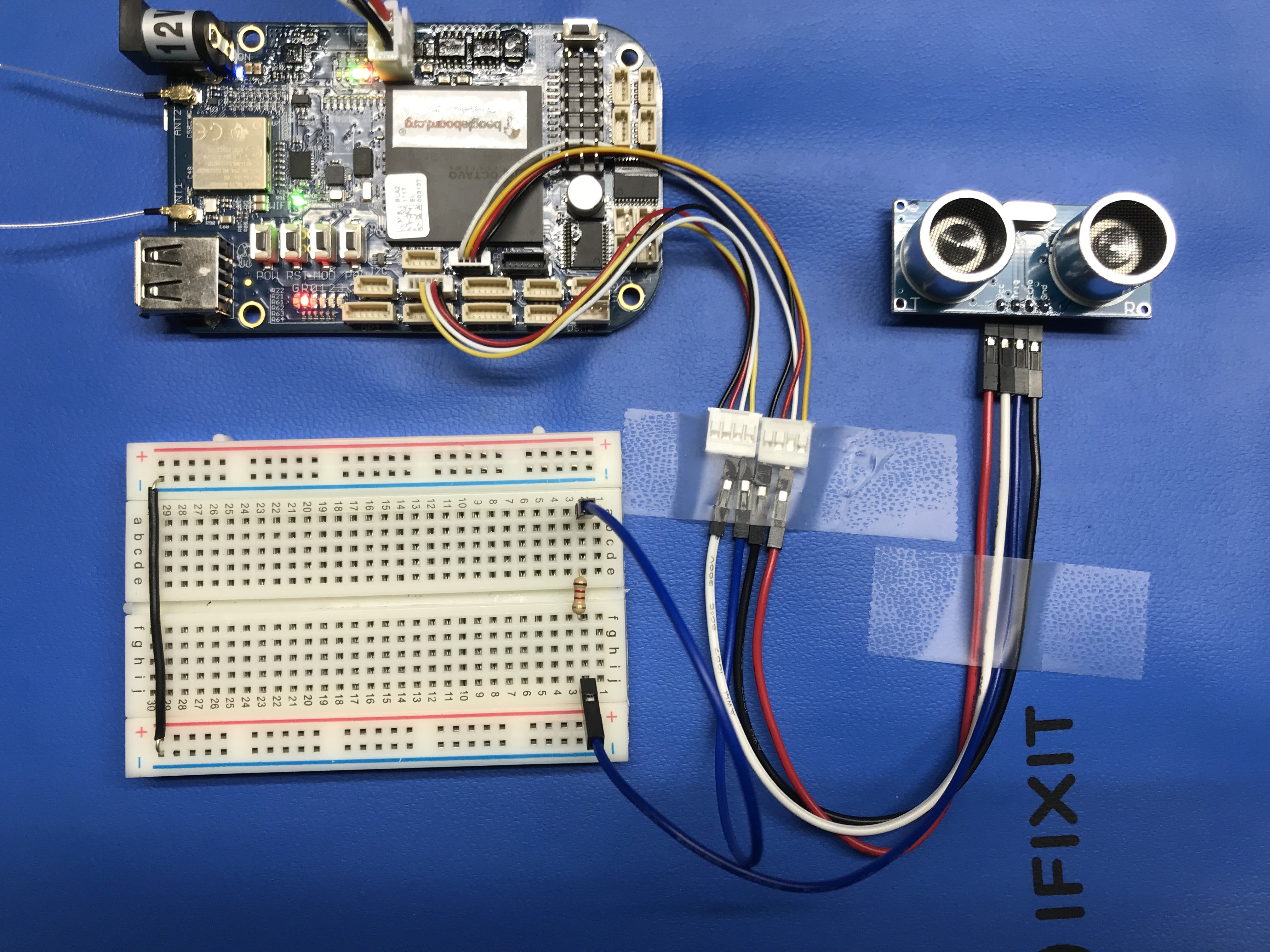
请注意,面包板仅用于将电阻器连接到 HC-SR04 传感器的回波通道。只要使用 1.0 至 1.2 K-OHM 电阻器保护 BeagleBone,您就可以从项目中完全移除面包板。
该项目的封面图片显示了添加到EduMIP平台的超声波 HC-SR04 传感器。如果您的目标只是让距离传感器与 BeagleBone Blue 配合使用,您可能希望完全跳过最后的 EduMIP 部分。如果您想将距离传感器添加到现有的 BluPants 爪/抓爪机器人,请按照本教程“ BluPants 爪/抓爪机器人”部分的所有说明进行操作。
连接 HC-SR04 模块
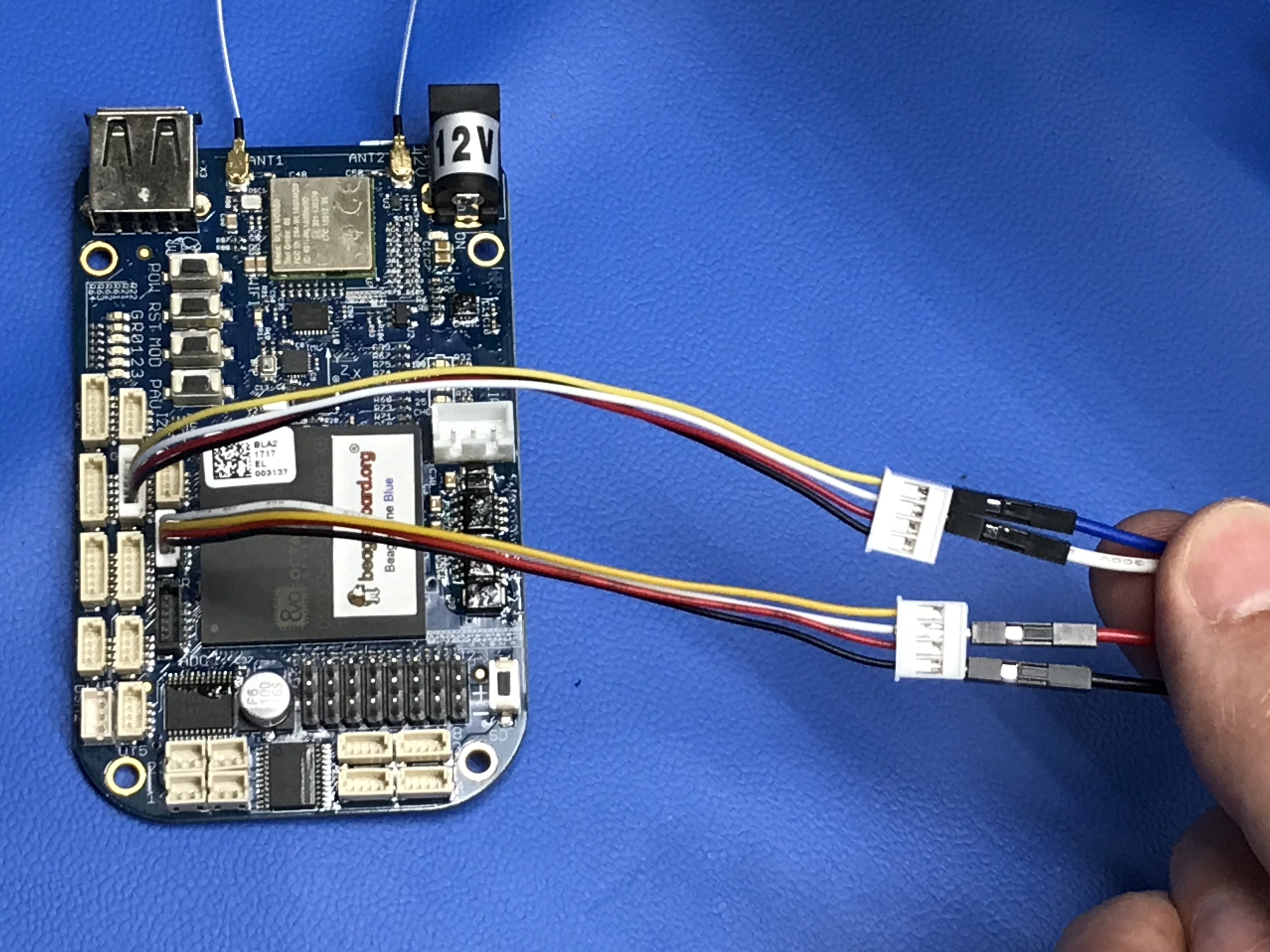
使用 6 针 JST 跳线并将其连接到 BeagleBone Blue 中的“GP0”插座。
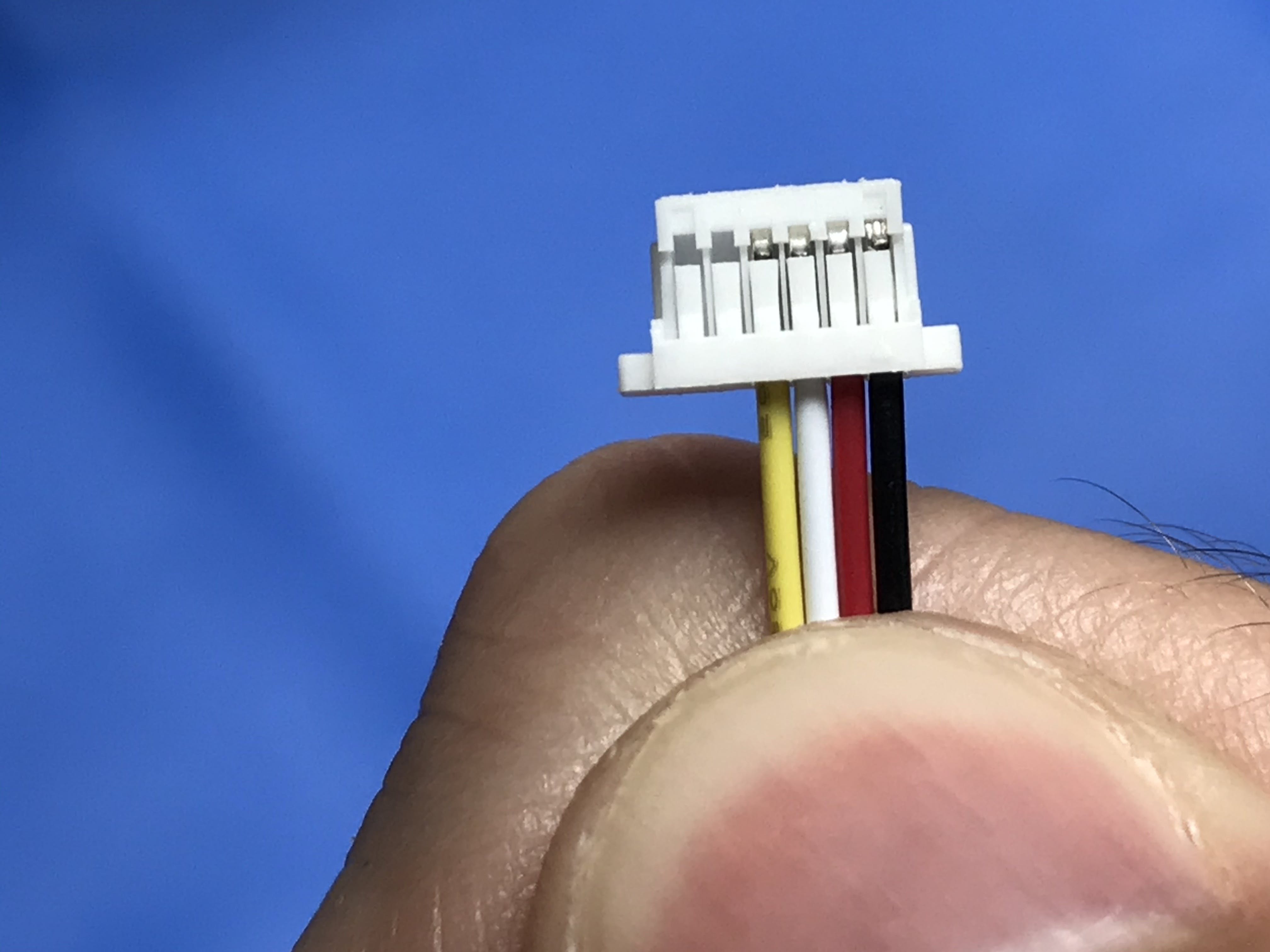
使用 4 针 JST 跳线并将其连接到 BeagleBone 中的“Power out”插座。
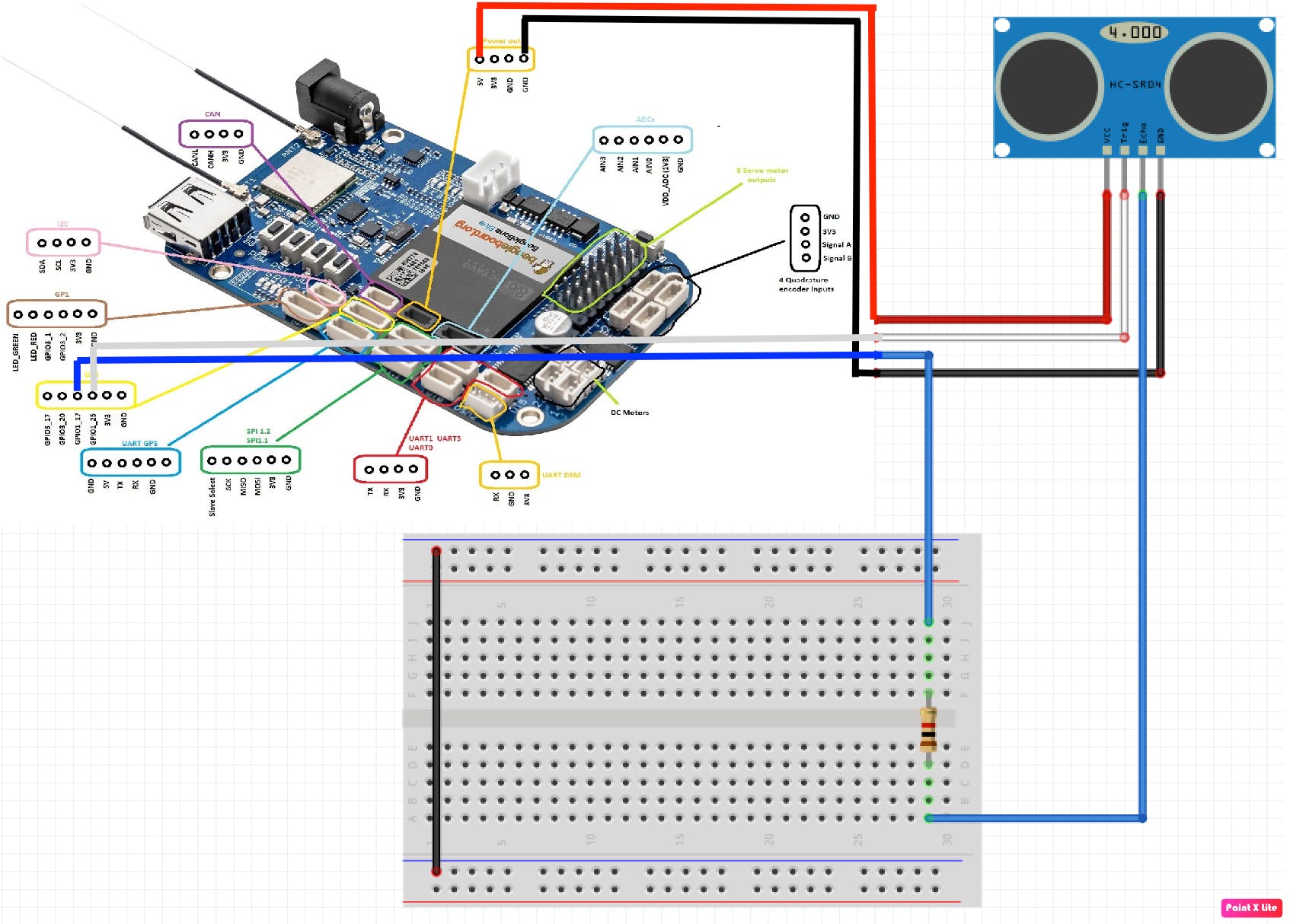
请在下面找到 BeagleBone Blue 引脚图。尝试识别板上的“GP0”和“Power out”连接器时可能会有所帮助:
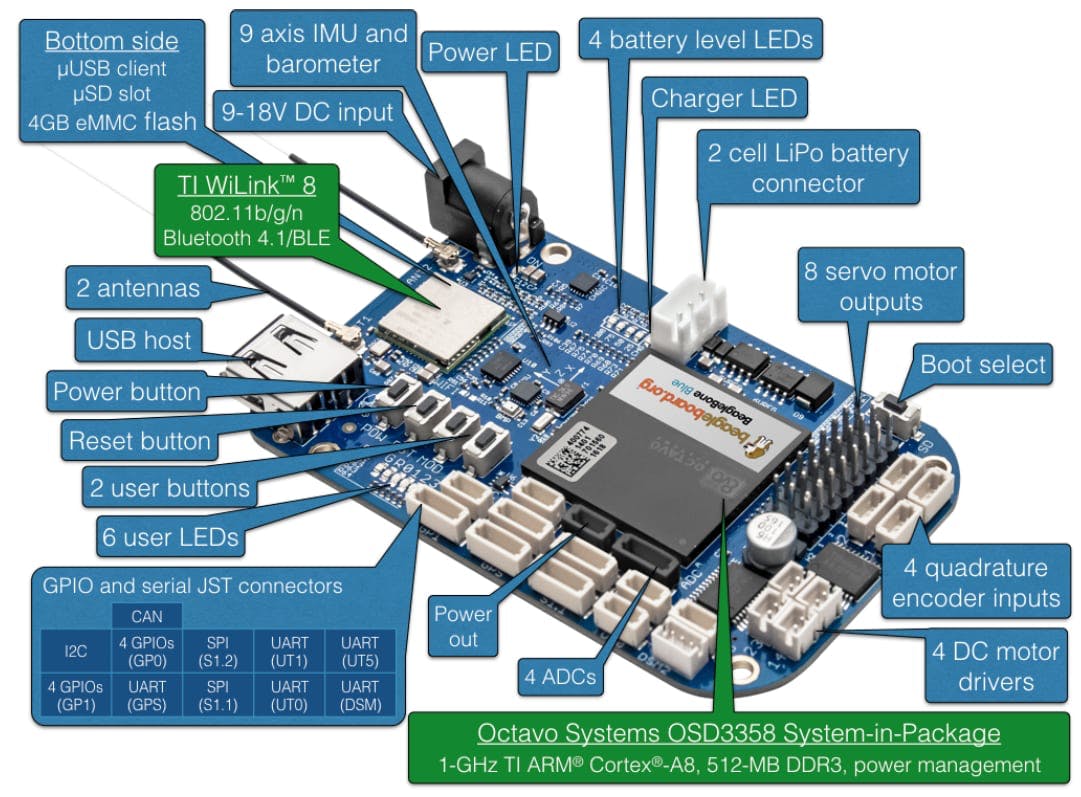
有关 BeagleBone Blue 引脚排列的更多详细信息,请参阅此链接:
https://groups.google.com/forum/#!category-topic/beagleboard/ZXSTPIcV4OU
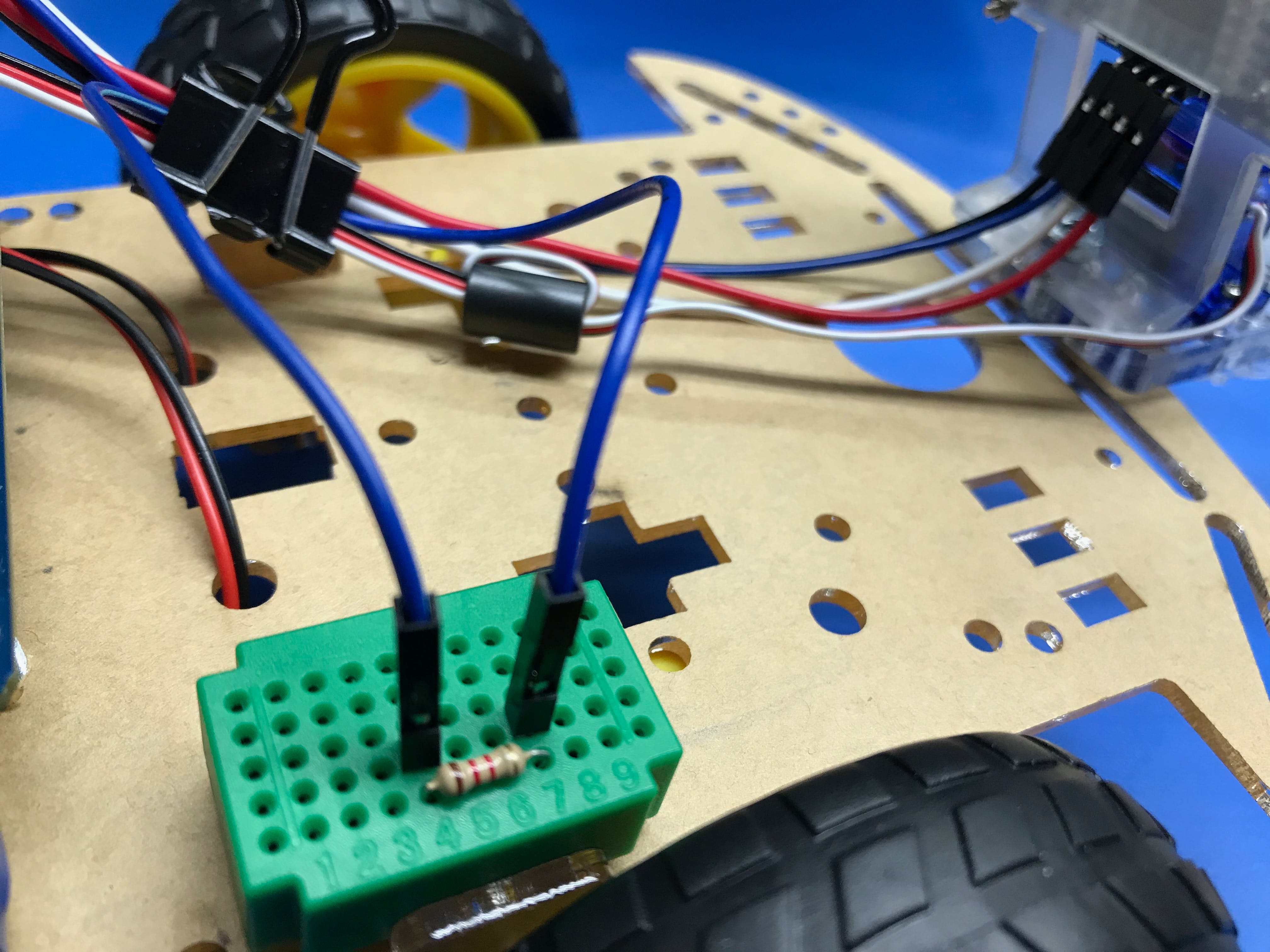
正确连接 JST 电缆后,使用一些跳线将 HC-SR04 连接到 JST 母连接器。确保为您的回声跳线使用 1K-OHM 电阻(此项目的蓝线)。如有必要,请使用面包板:
完成接线后,您的项目应类似于下图:
用 Python 测量距离
请在 Github 上找到示例 Python3 模块hcsr04.py以测试您的项目:
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import Adafruit_BBIO.GPIO as GPIO
import time
# HC-SR04 connection
# red wire
vcc = "5V"
# white wire
trigger = "GPIO1_25"
# blue wire using resistor
echo = "P9_23" #echo = "GPIO1_17"
# black wire
gnd = "GND"
GPIO.cleanup()
time.sleep(2)
def distance_measurement(TRIG,ECHO):
GPIO.output(TRIG, True)
time.sleep(0.00001)
GPIO.output(TRIG, False)
pulseStart = time.time()
pulseEnd = time.time()
counter = 0
while GPIO.input(ECHO) == 0:
pulseStart = time.time()
counter += 1
while GPIO.input(ECHO) == 1:
pulseEnd = time.time()
pulseDuration = pulseEnd - pulseStart
distance = pulseDuration * 17150
distance = round(distance, 2)
return distance
# Configuration
print("trigger: [{}]".format(trigger))
GPIO.setup(trigger, GPIO.OUT) #Trigger
print("echo: [{}]".format(echo))
GPIO.setup(echo, GPIO.IN) #Echo
GPIO.output(trigger, False)
print("Setup completed!")
# Security
GPIO.output(trigger, False)
time.sleep(0.5)
distance = distance_measurement(trigger, echo)
while True:
print("Distance: [{}] cm.".format(distance))
time.sleep(2)
if distance <= 5:
print("Too close! Exiting...")
break
else:
distance = distance_measurement(trigger, echo)
GPIO.cleanup()
print("Done")
演示
hcsr04.py模块将每 2 秒打印一次以厘米为单位的距离。如果物体离传感器太近(5厘米或更小),它将中断执行并退出。
BluPants 爪/抓爪机器人
组装机器人
我建议使用这两个教程来组装您的基础抓手机器人,这样您就可以将距离传感器安装在它的顶部:
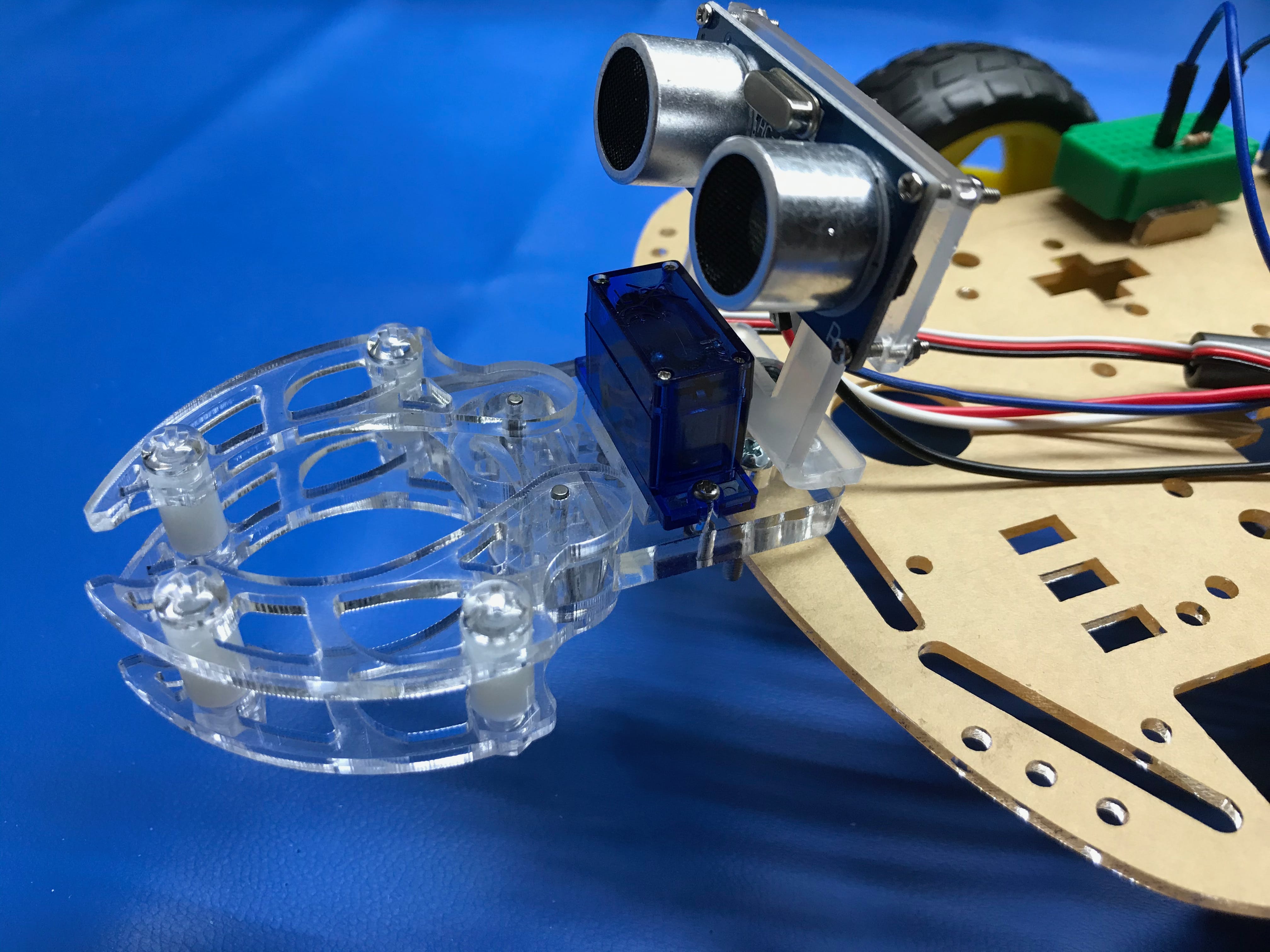
准备好基爪机器人后,您可以向其添加距离传感器。你可以通过许多不同的方式来做到这一点。例如,您可以使用胶带将其连接到爪式伺服系统(就像我们为Raspberry Pi 机器人所做的那样),或者使用这样的支架:
所示的 HC-SR04 传感器固定在机器人的前部。未使用添加伺服器以平移传感器的部分。如果您希望能够平移距离传感器,可以随意添加它。
将 HC-SR04 连接到机器人后的最终结果应该与此类似:
另一个建议是使用迷你面包板来节省机箱上的空间,以便将来可能要添加的附加组件。
将距离传感器添加到 MVP 或爪式机器人后,您就可以使用BluPants Studio编写一些代码了。
EduMIP
组装机器人
我强烈推荐使用这个很棒的教程来组装你的 EduMIP:
EduMIP:使用 HC-SR04 传感器避开障碍物
如果您想让距离传感器与您的 EduMIP 一起工作,请在Github上找到此示例代码,以让您的机器人随机驾驶避开障碍物。它基于 BluPants 项目,可以安装到您现有的 BeagleBone Blue 映像中。有关更多详细信息,请参阅Github repo 上的说明。
或者,您可以简单地安装 BluPants映像,这样您就不必担心所有的软件依赖性。要安装 BluPants 映像,请从此链接下载blupants_beagleboneblue.img.xz 映像,然后根据 BeagleBone 官方入门指南中的文档将其刷入您的机器人。启动映像后,您需要在 Beaglebone 中编辑两个文件:
取消注释行:
/usr/bin/rc_balance_dstr -i dstr &
将 robot_id 设置为 1:
"robot_id": 1,
编辑文件后,重新启动 Beaglebone,或重新启动 BluPants 服务:
sudo service blupants 重启
一旦服务再次运行,您应该能够平衡您的机器人并使用基于 Blockly 的编程平台BluPants Studio来控制它。
- Arduino社交距离传感器 0次下载
- 光学距离传感器开源分享 0次下载
- 超传感器距离标志开源分享 0次下载
- 使用距离传感器和蜂鸣器 1次下载
- 距离传感器和OLED开源分享 0次下载
- BeagleBone Black的PCB板 0次下载
- 远距离激光反馈反射光电开关传感器产品手册 13次下载
- 0-10米远距离漫反射光电开关传感器 17次下载
- 基于二维纳米材料的电致敏化学传感器详细资料 6次下载
- 如何使用可靠信标和节点度估计距离进行无线传感器网络定位算法的说明 6次下载
- beaglebone--Android开发教程(中文资料) 12次下载
- 使用红外技术的近距离传感器的设计 24次下载
- 用环境光传感器封装近距离传感器的优点 29次下载
- 一种新的远距离超声测障传感器时变增益电路_崔慧海 0次下载
- 基于感知距离调节的无线传感器网络节能区域覆盖 20次下载
- 操作BeagleBone Black的方法 2781次阅读
- 超声波传感器如何接线_超声波传感器测距 1.4w次阅读
- 超声波传感器的应用 1411次阅读
- dfrobotGP2Y0A02YK 距离传感器介绍 2876次阅读
- dfrobotGP2Y0A21 距离传感器介绍 2421次阅读
- 激光传感器工作原理_激光传感器应用 1.4w次阅读
- dfrobot 红外距离传感器 介绍 1860次阅读
- 机器人传感器常用的有哪几种 2w次阅读
- 各种距离传感器的工作原理解析 1.5w次阅读
- 超声波传感器与红外线传感器对比谁更好 1.1w次阅读
- 传输时间激光距离传感器的工作原理及发展情况 1710次阅读
- 避障常用哪些传感器?几种传感器的基本工作原理 3.5w次阅读
- 距离传感器原理及应用 1.7w次阅读
- 电容位移传感器原理及测量原理特性 1.3w次阅读
- 手机距离传感器原理及应用 8.4w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论