 自动驾驶前端软件DreamView的使用介绍
自动驾驶前端软件DreamView的使用介绍

为保证自动驾驶车辆能为电脑提供及时、准确、可靠的决策控制依据,实现或辅助实现车辆的驾驶操作,需由传感器为感知系统负责采集车辆自身状态信息、周围环境信息等数据。
并传输至Monitor模块,及时监测硬件及系统的健康状况。当出现问题时,系统及驾驶员即可中止驾驶过程。
对于驾驶中的信息,用户可以通过Web应用程序「DreamView」来查看、掌握自动驾驶系统的输出数据。
「DreamView」的输出数据,包括车道、位置、车身等情况。TA提供如下的功能:
「可视化显示」当前自动驾驶车辆模块的输出信息。例如规划路径、车辆定位、车架信息等。
为使用者提供「人机交互接口」以监测车辆硬件状态。对模块进行开关操作,启动自动驾驶车辆等。
提供「调试工具」。例如PnC监视器可以高效的跟踪模块输出的问题。

该应用程序的界面被划分为多个区域:标题、侧边栏、主视图和工具视图。

标题包含4个下拉列表,可以像下述图片所示进行操作:
附注:导航模块是在Apollo 2.5版本引入的「满足低成本测试」的特性。
在该模式下,Baidu或Google地图展现的是车辆的绝对位置,而主视图中展现的是车辆的相对位置。


侧边栏控制着显示在工具视图中的模块。
Tasks
在DreamView中使用者可以操作的Tasks有:

「Quick Start」:当前选择的模式支持的指令。通常情况下,
Setup:开启所有模块
Reset all:关闭所有模块
Start auto:开始车辆的自动驾驶
「Others」:工具经常使用的开关和按钮;
「Module Delay」:从模块中输出的两次事件的时间延迟;
「Console」:从Apollo平台输出的监视器信息;
「Module Controller」:监视硬件状态和对模块进行开关操作 。

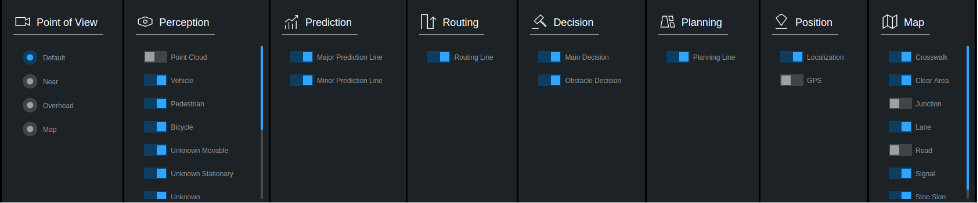
Layer Menu
显式控制各个元素「是否显示」的开关。
在向Routing模块发送寻路信息请求前可以「编辑路径信息」的可视化工具。
Data Recorder
将问题报告给Rosbag中的Drive Event的界面

Default Routing
预先定义的路径或者路径点,该路径点称为兴趣点(POI)。

如果「打开」路径编辑模式,路径点可被显式的在地图上添加。
如果「关闭」路径编辑模式,点击一个期望的POI会向服务器发送一次寻路请求。
如果「只选择一个点」,则寻路请求的起点是自动驾驶车辆的当前点。
否则寻路请求的起点是选择路径点中的第一个点。
查看Map目录下的default_end_way_point.txt文件可以编译POI信息。
例如,如果选择的地图模式为“Demo”,则在modules/map/data/demo目录下可以查看对应的default_end_way_point.txt文件。

主视图在Web页面中以动画的方式展示3D计算机图形。
下表列举了主视图中各个元素:
| Visual Element | Depiction Explanation |
| 自动驾驶车辆 | |
|
车轮转动的比率 左右转向灯的状态 |
|
 |
交通信号灯状态 |
 |
驾驶状态(AUTO/DISENGAGED/MANUAL等) |

|
行驶速度 km/h 加速速率/刹车速率 |
|

| 红色粗线条表示建议的寻路路径 | |
 |
轻微移动物体决策-橙色表示应该避开的区域 |
 |
绿色的粗曲线条带表示规划的轨迹 |
障碍物
| Visual Element | Depiction Explanation |
 |
车辆障碍物 |
 |
行人障碍物 |
 |
自行车障碍物 |
 |
未知障碍物 |
 |
速度方向显示了移动物体的方向,长度随速度按照比率变化 |
 |
白色箭头显示了障碍物的移动方向 |
 |
黄色文字表示: 障碍物的跟踪ID 自动驾驶车辆和障碍物的距离及障碍物速度 |
 |
线条显示了障碍物的预测移动轨迹,线条标记为和障碍物同一个颜色 |

决策栅栏区
决策栅栏区显示了Planning模块对车辆障碍物做出的决策。
每种类型的决策会表示为不同的颜色和图标,如下图所示:
| Visual Element | Depiction Explanation |

| 停止表示物体主要的停止原因 | |

| 停止表示物体的停止原因 | |

| 跟车物体 | |

| 让行物体决策—点状的线条连接了各个物体 | |

| 超车物体决策—点状的线条连接了各个物体 |
线路变更是一个特殊的决策,因此不显示决策栅栏区,而是将路线变更的图标显示在车辆上。
| Visual Element | Depiction Explanation |
 |
变更到左车道 |
 |
变更到右车道 |
在优先通行的规则下,当在交叉路口的停车标志处做出让行决策时,被让行的物体在头顶会显示让行图标。
| Visual Element | Depiction Explanation |
 |
停止标志处的让行物体 |
停止原因
如果显示了停止决策栅栏区,则停止原因展示在停止图标的右侧。
可能的停止原因和对应的图标为:
| Visual Element | Depiction Explanation |
 |
前方道路侧边区域 |
 |
前方人行道 |
 |
到达目的地 |
 |
紧急停车 |
 |
自动驾驶模式未准备好 |
 |
障碍物阻塞道路 |
 |
前方行人穿越 |
| 黄/红信号灯 | |
| 前方有车辆 | |
| 前方停止标志 | |
| 前方让行标志 |
可以在主视图中展示多种从「Layer Menu」选择的视图模式:
| Visual Element | Depiction Explanation |
| 默认视图 | |
| 近距离视图 | |
| 俯瞰视图 | |
|
地图: 放大/缩小:滚动鼠标滚轮或使用两根手指滑动; 移动:按下右键并拖拽或或使用三根手指滑动。 |
-
传感器
+关注
关注
2573文章
54374浏览量
786092 -
人机交互
+关注
关注
12文章
1275浏览量
57638 -
自动驾驶
+关注
关注
791文章
14670浏览量
176533
原文标题:技术文档 | DreamView用法介绍
文章出处:【微信号:Apollo_Developers,微信公众号:Apollo开发者社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
FPGA在自动驾驶领域有哪些应用?
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?
自动驾驶真的会来吗?
细说关于自动驾驶那些事儿
自动驾驶的到来
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛
如何让自动驾驶更加安全?
自动驾驶汽车的处理能力怎么样?
联网安全接受度成自动驾驶的关键
如何保证自动驾驶的安全?
自动驾驶系统设计及应用的相关资料分享
自动驾驶技术的实现
自动驾驶线控底盘VCU功能介绍
自动驾驶算法软件架构介绍






 工商网监
工商网监
评论