 自制四轴遥控飞行器
自制四轴遥控飞行器

如果你想享受飞行的乐趣,不想被装机,修机折磨,并且又有一定的经济条件的话,那么大疆精灵是你不二的选择。如果你想体验飞行和动手的双重乐趣,或者RMB是个问题,那么自己动手制作四轴飞行器吧!
一、 基础篇
1、理论基础
首先,你得明白你要做的东西—四轴飞行器的工作原理。四轴飞行器大致由以下几个部分构成:
①机架:飞机的骨架,载有各种设备
②飞控:飞机的大脑,载有加速度计、陀螺仪、气压计、罗盘等传感器。由它来控制四个电机的转速进而控制飞机的姿态。或是加上GPS完成定高定点返航等功能。其本质是单片机。常见的飞控有xaircraft的superX、DJI的NAZAWKMA2、零度的X4双子星、APM、MWC、QQ飞控、CC3D等
③电调:全称电子调速器,它的输入是直流,通常由2-6节锂电池来供电。输出是三相交流,可以直接驱动电机。另外航模无刷电子调速器还有三根信号输出线,用于接接收机。信号线可以引出稳定的5V电压,一般可以带2-4个舵机供电。航空模型就是通过遥控对航模无刷电子调速器的控制以达到调整飞机的各种飞行姿势和动作。
④无刷电机:通过三相交流电产生一个旋转磁场驱动转子转动。有宽调速、小体积、高效率和稳态转速误差小等特点。无刷电机KV值定义为转速/V,意思为输入电压增加1伏特,无刷电机空转转速增加的转速值。但对于无刷电机来说不只是说明电机转速与电压成严格的线性比例关系,详见百度百科
⑤遥控、接收:顾名思义
Q:什么是美国手、日本手?
A:遥控器上油门的位置在右边是日本手、在左边是美国手。个人推荐美国手,左手控制油门和转向,右手控制副翼和俯仰,比较符合认知规律
Q:几通道是什么?
A:通道就是可以遥控器控制的动作路数,比如四轴需要控制油门、转向、俯仰、横滚四个动作,那么你最少需要一个四通道的遥控器
⑥电池:锂电,不同于常见的锂电池,最大的特点是放电倍率大
Q:电池上的几S是什么意思?
A:几S即为几片串联,比如3S2200mAh就是3片2200mAh的电池串联,额定电压11.1V,因为飞行器的功率大,所以我们要提高电压来减小电流的热损耗(Q=I2Rt)。又因为我们把锂电池串联使用,所以我们需要平衡充电器,简称平衡充。就是为了将每一片电池的电压充到一个水平以防过充过放,锂电池是很娇气的,所以我们平常用的电池都有保护板来防止过充过放,但是一般的保护板承受不了这么大的电流,所以在日常使用中必须用平衡充。
Q:电池上的几C是什么意思?
A:放电倍率。是指电池在规定的时间内放出其额定容量时所需要的电流值,它在数据值上等于电池额定容量的倍数,通常以字母C表示。比如3S2200mAh20C,那么它的最大放电电流就是2.2*20=44A
⑦充电器:即为平衡充。可以将每一片锂电池充到相同的电压。有些还有放电、测内阻、绘制放电曲线等功能
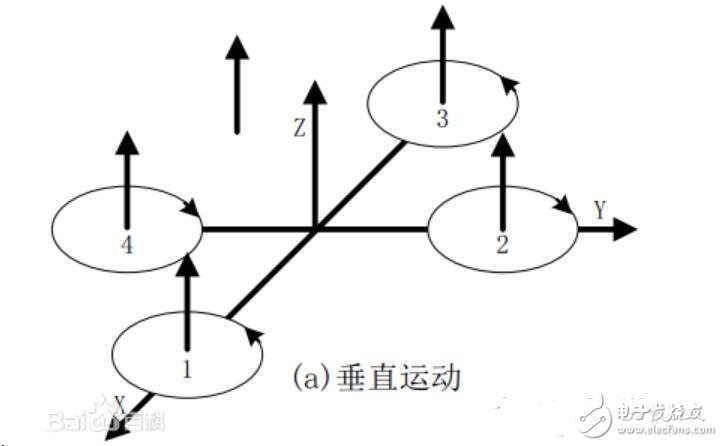
那么,四轴飞行器又是怎么运动的呢?(配图以“十”模式为例,转自百度百科)
图(a)中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。
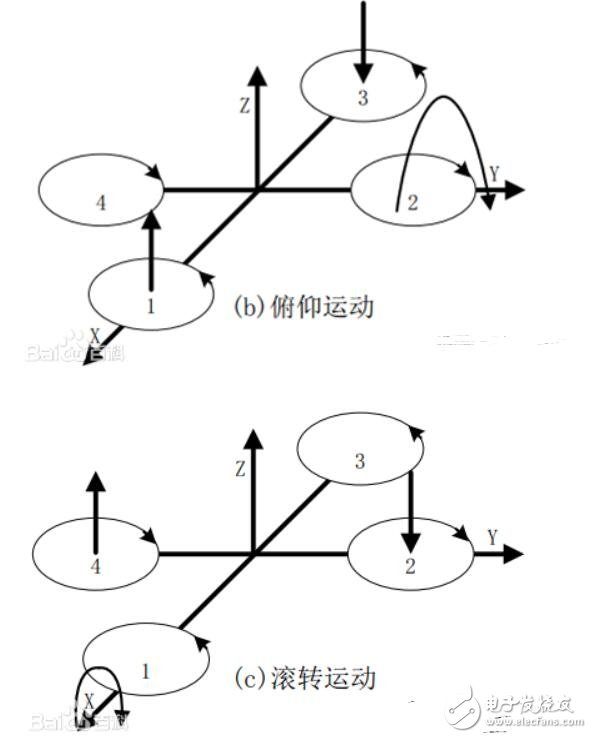
图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速改变量的大小应相等。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。横滚同理。
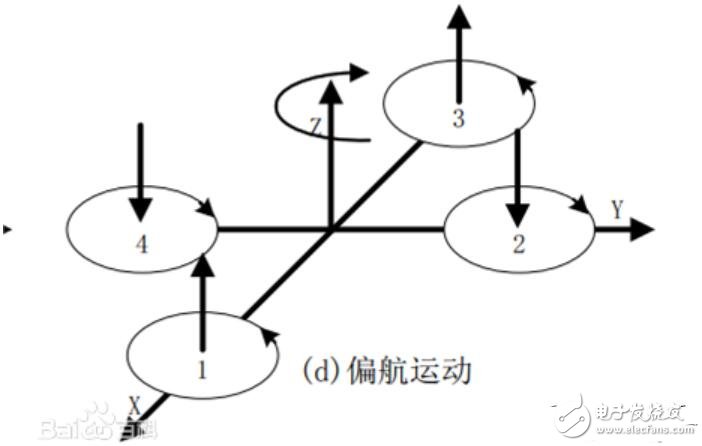
四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的来年各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图(d)中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
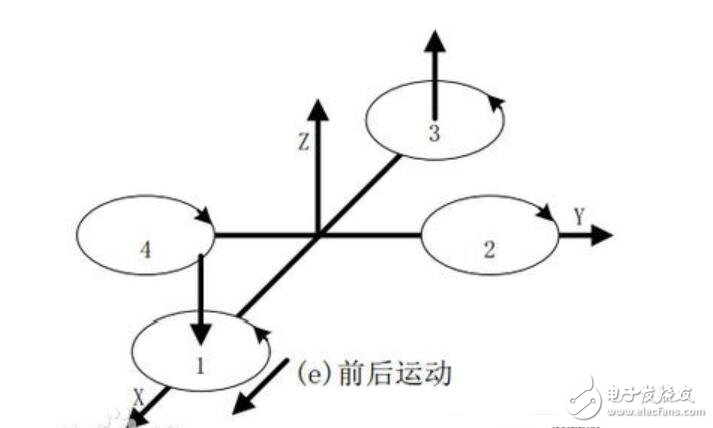
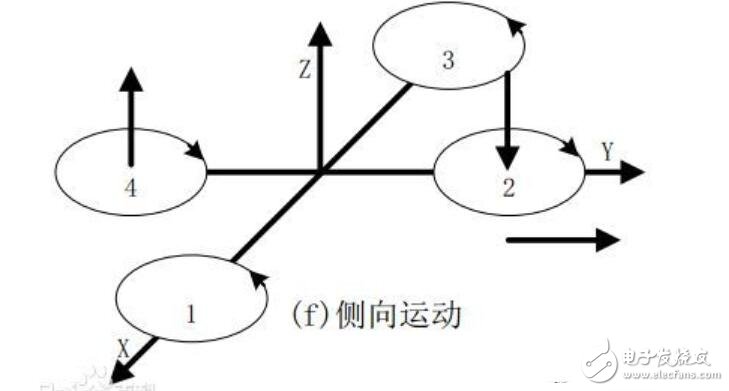
要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图(e)中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图(b)的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。当然在图(b)图(c)中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。
2、工具基础
为了减少不必要的花费,推荐大家一次性购买以下工具及耗材:
电烙铁、剥线钳、剪线铅(普通钳子hold不住那么粗的硅胶线)、内六角一套、螺丝刀一套(国产的南旗,极具性价比!)、小台钳、零件盒(我知道TB有一家挺便宜需要的可以PM我)、水平泡、热缩管(4mm和5mm的用的比较多,别的看情况) 、BB响(小东西容易丢买几个吧…)
二、 设备购买
大部分模友本地都没有模型店,所以TB是主战场,一定不要贪便宜去不知名的小店买,买到假货得不偿失(电机电调居多),毕竟天上飞的东西,安全最重要。
1.飞控:QQ飞控,有自稳,调试简单,便宜。或者NAZAlite也可。NAZA用户注意了,在调参软件里把低压保护关掉,否则你会发现飞行时间大幅缩水,直接用BB响设置3.6V报警。如果新手不能熟练降落那就设置3.7V报警吧,报警后还能撑2分钟左右
2.电机:2212 KV980 推荐朗宇A2212(用的人多,便宜,售后也不错) 银燕2212(新出的,貌似也不错)。出来飞,总是要炸的,不用买太好的,先用便宜的设备练技术。不过XXD真心不推荐
3.电调:如果没有升级大电机的打算,好盈天行者20A足够。还可以刷blheli固件,完爆铂金。如果想一步到位可以入铂金30A或者乐天(X-roter)吧。不过还没上市……不推荐四合一,坏一个全不能用了
4.桨:8元一对的仿APC1047,自己做平衡。或者1045也行。第一次直接买至少十对,相信我,新手最容易坏桨。否则邮费比东西还贵就不划算了
5.机架:可以用仿F450,便宜,炸了不心疼。新手不要配脚架,起降的时候容易翻。或者自己做,推荐铝方管材料的,便宜耐炸还轻。可以参照我的架子
6.遥控:推荐一步到位,没钱用华科尔D10或者天地飞9。有钱用futuba。不想一步到位的话天地飞吧,不要买天地飞 ,太坑了,出二手根本没人要掉价特别快,天七掉价还慢点
7.充电器:推荐一步到位,不要买B6,根本就是个坑。最差也要UNA6吧
8.电池:本套设备用3S2200 25C 花牌不错,质量售后都过得去,就是小贵。达普好像也行。不推荐杂牌。有动手能力的自己买电芯自己组(电池买3块左右吧)
三、 设备组装
1. 机架的安装,详见说明书
2. 电机与电调的连接:可以用香蕉头,不过不推荐,引起新手炸机最高的两个原因就是香蕉头松脱和射桨。香蕉头多次插拔后会氧化,变松。所以推荐调整好电机转向后(将三根线中的任意两跟对调以后即可反转)直接焊死。电机具体转向请参照飞控的说明。
3. 电调与插头的链接:注意不要出现环形的线,以免产生电磁场影响电子设备。无把握可以用分电板,不过不推荐。
4. 电调与飞控、飞控与接收的连接:参照电调,飞控、遥控器的说明书。
5. 装桨:调试时一定不要装桨!调试完毕可以起飞时再装桨。不要用子 dan头这种东西,容易射桨,换成防松螺母。可能会不好拧,用普通螺母拧两个也行
6.如果是这种电机座,或者类似这种伸出机臂的,不推荐安装,反正我是不看好这种,轻轻一掰就有裂纹,不敢上天。
原装电机座既轻又结实,搭配铝方管简直绝配,像这样
四、 装机完成后首飞前准备
1. 确保各个器件之间连接正确可靠,桨的方向正确,电机转向正确,如果是管状机臂一定要调水平电机座。确保遥控电量充足。遥控的通道与飞机各个动作对应,可以在地面调参软件中查看
2. 最好练一下模拟器,随便什么直机都行,练会对尾悬停就基本可以飞四轴了,有一定的舵面反应,别上天以后慌了神不知道手怎么动作就行。四轴特别好飞(如果你飞过直机),难度比直机小多了
3. 手法:新手初期飞行时,推杆时不要大舵量,毕竟不是玩具,怎么推都没事。推杆时一定要一点一点推,要慢要稳。起飞时因为有地面效应飞机乱晃的话可以适当给一个大油门。(我首飞就是因为推杆太激动炸的,死无全尸)
4. 场地:一定要无人,空旷,远离楼群街道。大疆用户远离一切可能有干扰的地方。最好无风
-
电机
+关注
关注
143文章
9485浏览量
153150 -
四轴飞行器
+关注
关注
55文章
207浏览量
52526
发布评论请先 登录
浙江锋锂低空飞行器电池解决方案亮相2025亚洲通用航空展
第四届飞行器健康管理技术国际高端论坛暨青年科学家论坛:昊衡科技,欢迎您来!


深圳反重力科技纯电动单人智能飞行器完成首次试飞
30%空间压缩奇迹:组合泵如何重塑飞行器动力系统布局逻辑

为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?

eVTOL低空飞行器电机为什么要用自粘结铁芯方案?
小马哥STM32F1主控720空心杯四轴飞行器资料(包含源代码和相关教程)
小型飞行器专用 AS-DR01模拟信号AI识别跟踪模块

《手把手教你做星闪无人机—KaihongOS星闪无人机开发实战》系列课程课件汇总

激光毁伤系统:低空飞行器的 “隐形猎手”
MATLAB在低空飞行器中的应用






 工商网监
工商网监
评论