 nand和nor区别 Linux-Nor Flash驱动分析
nand和nor区别 Linux-Nor Flash驱动分析

本文主要是关于nand和nor的相关介绍,并着重对nand和nor进行了详尽的对比区分。
NOR Flash
它是现在市场上两种主要的非易失闪存技术之一。Intel于1988年首先开发出NOR Flash 技术,彻底改变了原先由EPROM(Erasable Programmable Read-Only-Memory电可编程序只读存储器)和EEPROM(电可擦只读存储器Electrically Erasable Programmable Read - Only Memory)一统天下的局面。紧接着,1989年,东芝公司发表了NAND Flash 结构,强调降低每比特的成本,有更高的性能,并且像磁盘一样可以通过接口轻松升级。NOR Flash 的特点是芯片内执行(XIP ,eXecute In Place),这样应用程序可以直接在Flash闪存内运行,不必再把代码读到系统RAM中。NOR 的传输效率很高,在1~4MB的小容量时具有很高的成本效益,但是很低的写入和擦除速度大大影响到它的性能。NAND的结构能提供极高的单元密度,可以达到高存储密度,并且写入和擦除的速度也很快。应用NAND的困难在于Flash的管理需要特殊的系统接口。通常读取NOR的速度比NAND稍快一些,而NAND的写入速度比NOR快很多,在设计中应该考虑这些情况。——《ARM嵌入式Linux系统开发从入门到精通》 李亚峰 欧文盛 等编著 清华大学出版社 P52 注释 API Key
NOR和NAND是现在市场上两种主要的非易失闪存技术。Intel于1988年首先开发出NOR flash技术,彻底改变了原先由EPROM和EEPROM一统天下的局面。紧接着,1989年,东芝公司发表了NAND flash结构,强调降低每比特的成本,更高的性能,并且象磁盘一样可以通过接口轻松升级。但是经过了十多年之后,仍然有相当多的硬件工程师分不清NOR和NAND闪存。
像“flash存储器”经常可以与相“NOR存储器”互换使用。许多业内人士也搞不清楚NAND闪存技术相对于NOR技术的优越之处,因为大多数情况下闪存只是用来存储少量的代码,这时NOR闪存更适合一些。而NAND则是高数据存储密度的理想解决方案。
NOR的特点是芯片内执行(XIP, eXecute In Place),这样应用程序可以直接在flash闪存内运行,不必再把代码读到系统RAM中。NOR的传输效率很高,在1~4MB的小容量时具有很高的成本效益,但是很低的写入和擦除速度大大影响了它的性能。
NAND结构能提供极高的单元密度,可以达到高存储密度,并且写入和擦除的速度也很快。应用NAND的困难在于flash的管理需要特殊的系统接口。
接口差别
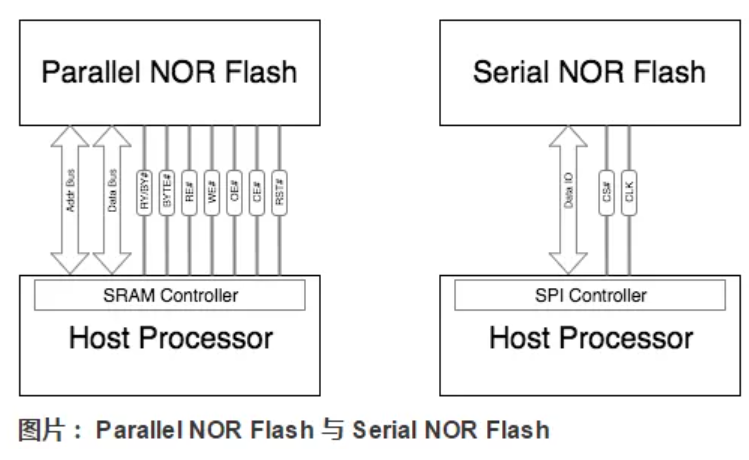
NOR flash带有SRAM接口,有足够的地址引脚来寻址,可以很容易地存取其内部的每一个字节。
NAND器件使用复杂的I/O口来串行地存取数据,各个产品或厂商的方法可能各不相同。8个引脚用来传送控制、地址和数据信息。
NAND读和写操作采用512字节的块,这一点有点像硬盘管理此类操作,很自然地,基于NAND的存储器就可以取代硬盘或其他块设备。
容量成本
NAND flash的单元尺寸几乎是NOR器件的一半,由于生产过程更为简单,NAND结构可以在给定的模具尺寸内提供更高的容量,也就相应地降低了价格。
NOR flash占据了容量为1~16MB闪存市场的大部分,而NAND flash只是用在8~128MB的产品当中,这也说明NOR主要应用在代码存储介质中,NAND适合于数据存储,NAND在CompactFlash、Secure Digital、PC Cards和MMC(多媒体存储卡Multi Media Card)存储卡市场上所占份额最大。
nand和nor区别
闪存芯片读写的基本单位不同
应用程序对NOR芯片操作以“字”为基本单位。为了方便对大容量NOR闪存的管理,通常将NOR闪存分成大小为128KB或者64KB的逻辑块,有时候块内还分成扇区。读写时需要同时指定逻辑块号和块内偏移。应用程序对NAND芯片操作是以“块”为基本单位。NAND闪存的块比较小,一般是8KB,然后每块又分成页,页的大小一般是512字节。要修改NAND芯片中一个字节,必须重写整个数据块。
2)NOR闪存是随机存储介质,用于数据量较小的场合;NAND闪存是连续存储介质,适合存放大的数据。
3) 由于NOR地址线和数据线分开,所以NOR芯片可以像SRAM一样连在数据线上。NOR芯片的使用也类似于通常的内存芯片,它的传输效率很高,可执行程序可以在芯片内执行( XI P, eXecute In Place),这样应用程序可以直接在flash闪存内运行,不必再把代码 读到系统RAM中。由于NOR的这个特点,嵌入式系统中经常将NOR芯片做启动芯片使用。而NAND共用地址和数据总线,需要额外联结一些控制的输入输出,所以直接将NAND芯片做启动芯片比较难。
4) N AN D闪存芯片因为共用地址和数据总线的原因,不允许对一个字节甚至一个块进行的数据清空,只能对一个固定大小的区域进行清零操作;而NOR芯片可以对字进行操作。所以在处理小数据量的I/O操作的时候的速度要快与NAND的速度。比如一块NOR芯片通 常写一个字需要10微秒,那么在32位总线上写512字节需要1280毫秒;而NAND闪存写512字节需要的时间包括:512×每字节50纳秒+10微秒的寻页时间+200微秒的片擦写时间=234微秒。
5)NAND闪存的容量比较大,目前最大容量己经达到8G字节。为了方便管理,NAND的存储空间使用了块和页两级存储体系,也就是说闪存的存储空间是二维的,比如K9F5608UOA闪存块的大小为16K,每页的大小是512字节,每页还16字节空闲区用来存放错误校验码空间(有时也称为out-of-band,OOB空间);在进行写操作的时候NAND闪存每次将一个字节的数据放入内部的缓存区,然后再发出“写指令”进行写操作。由于对NAND闪存的操作都是以块和页为单位的,所以在向NAND闪存进行大量数据的读写时,NAND的速度要快于NOR闪存。
6)NOR闪存的可靠性要高于NAND闪存,这主要是因为NOR型闪存的接口简单,数据操作少,位交换操作少,因此可靠性高,极少出现坏区块,因而一般用在对可靠性要求高的地方。相反的,NAND型闪存接口和操作均相对复杂,位交换操作也很多,关键性数据更是需安错误探测/错误更正〔EDC/ECC)算法来确保数据的完整性,因此出现问题的几率要大得多,坏区块也是不可避免的,而且由于坏区块是随机分布的,连纠错也无法做到。
7)NAND Flash一般地址线和数据线共用,对读写速度有一定影响;而NOR Flash闪存数据线和地址线分开,所以相对而言读写速度快一些。
NAND和NOR芯片的共性首先表现在向芯片中写数据必须先将芯片中对应的内容清空,然后再写入,也就是通常说的“先擦后写”。只不过NOR芯片只用擦写一个字,而NAND需要擦写整个块。其次,闪存擦写的次数都是有限的。当闪存的使用接近使用寿命的时候,经常会出现写操作失败;到达使用寿命时,闪存内部存放的数据虽然可以读,但是不能再进行写操作了所以为了防止上面问题的发生,不能对某个特定的区域反复进行写操作。通常NAND的可擦写次数高于NOR芯片,但是由于NAND通常是整块擦写,块内的页面中如果有一位失效整个块就会失效,而且由于擦写过程复杂,失败的概率相对较高,所以从整体上来说NOR的寿命较长。
另一个共性是闪存的读写操作不仅仅是一个物理操作,实际上在闪存上存放数据必须使用算法实现,这个模块一般在驱动程序的MTD‘ (Memory Technology Drivers)模块中或者在FTLZ (Flash Translation Layer)层内实现,具体算法和芯片的生产厂商以及芯片型号有关系。
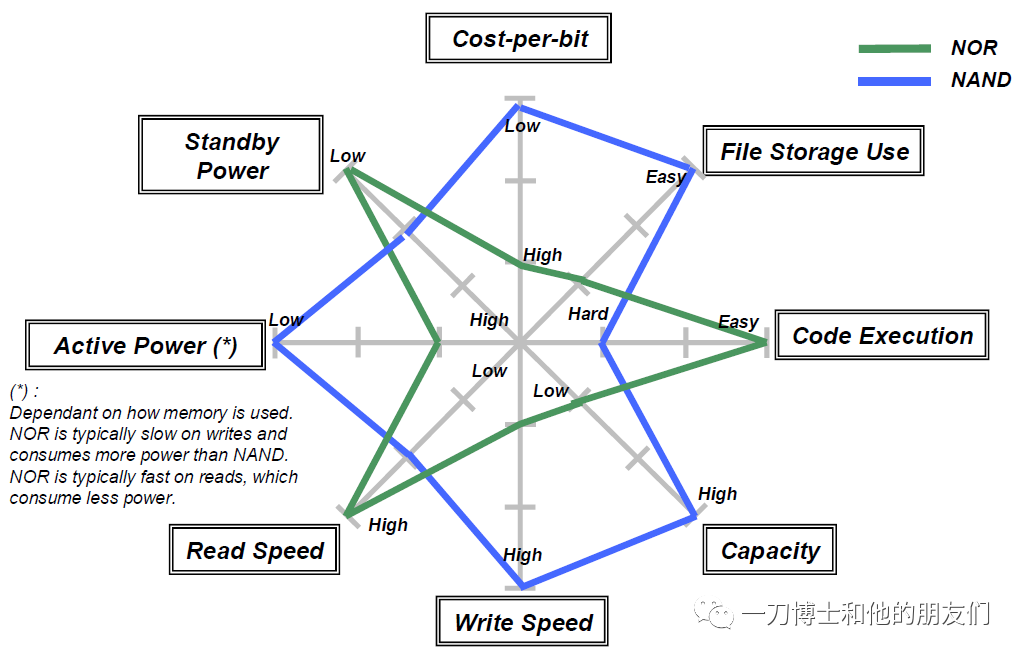
从使用角度来看,NOR闪存与NAND闪存是各有特点的:(1)NOR的存储密度低,所以存储一个字节的成本也较高,而NAND闪存的存储密度和存储容量均比较高;(2)NAND型闪存在擦、写文件(特别是连续的大文件)时速度非常快,非常适用于顺序读取的场合,而NOR的读取速度很快,在随机存取的应用中有良好的表现。 NOR与NAND各有所长,但两种优势无法在一个芯片上得到体现。所以,设计人员在选用芯片时,只能趋其利而避其害,依照使用目的和主要功能在两者之间进行适当的选择。
NAND与NOR技术的比较
一般的原则是:在大容量的多媒体应用中选用NAND型闪存,而在数据/程序存贮应用中选用NOR型闪存。根据这一原则,设计人员也可以把两种闪存芯片结合起来使用,用NOR芯片存储程序,用NAND芯片存储数据,使两种闪存的优势互补。事实上,这种聪明的设计早已普遍应用于手机、PocketPC、PDA及电子词典等设备中了。
在选择存储解决方案时,设计师必须在多种因素之间进行权衡,以获得较高的性价比。以手机为例,采用支持XIP技术的NOR闪存能够直接运行OS,速度很快,既简化了设计,又降低了成本,所以许多手机都采用NOR+RAM的设计。NOR闪存的不足之处是存储密度较低,所以也有采用NAND+RAM的设计。对于这两种方案,很难说哪一种更好,因为我们不能离开具体的产品而从某一个方面单纯地去评价。追求小巧优雅的手机将需要NOR闪存支持;追求大存储容量的手机则将更多地选择NAND闪存;而同时追求功能和速度的手机则会采用NOR+NAND+RAM的设计,这种取长补短的设计能够发挥NOR和NAND各自的优势。
除了速度、存储密度的因素,设计师在选择闪存芯片时,还需要考虑接口设计、即插即用设计和驱动程序等诸多问题,因为两种类型的闪存在上述几个方面也有很多的不同。譬如在驱动程序方面,NOR器件运行代码不需要任何的软件支持,而在NAND器件上进行同样操作时就需要存储技术驱动程序(MTD)的支持。虽然NAND和NOR器件在进行写入和擦除操作时都需要MTD,但对于NAND来说驱动程序的开发难度更大,因为NAND闪存的纠错和坏块处理功能都需要通过驱动程序来实现。
使用性差异
在使用性上体现出的差异也是与NOR和NAND自身的架构设计分不开的,首先在接口方面,NOR的设计有明显的传统闪存的特征,因此实际应用起来相对于NAND全新的复杂I/O设计要容易得多。而且,在使用NAND闪存时,必须先写入驱动程序,才能继续执行其他操作。
其次,在可重复擦写的能力方面,NAND的每块可擦写次数在10万至100万次之间,NOR则只是它的1/10,而且NAND的每个擦除块的容量也只有NOR的1/8至1/2,这就表明,每个块的擦写的频率要少于NOR闪存,从而有助于延长使用寿命。在数据的保存时间上,两者都差不多,为10年的水平。
不过,由于串联的架构,NAND的晶体管之间更容易造成影响,使逻辑0变成逻辑1,并且也很难发现出问题的晶体管,这种现象可称为位翻转(Bit-Flipping),这就需要动用EDC/ECC(错误检测码/错误修正码)来进行校正,这方面的问题NOR则较少出现。
另外,NAND在使用中还存在着坏块管理的问题,在NAND闪存中,由于坏块是随机分布的,因此需要进行扫描并将坏块打上标记,就像对付硬盘中的坏扇区一样。目前的产品中,可最多允许出现80个坏块。坏块的存在使得向NAND闪存写入信息需要相当的技巧,因为设计师绝不能向坏块写入,这就意味着在NAND闪存上自始至终都必须进行虚拟映射。
在软件支持程度方面,应该区别基本的读/写/擦操作和高一级的用于磁盘仿真和闪存管理算法的软件,包括性能优化。
在NOR闪存上运行代码不需要任何的软件支持,在NAND闪存上进行同样操作时,通常需要驱动程序,也就是内存技术驱动程序(MTD),NAND和NOR闪存在进行写入和擦除操作时都需要MTD。
使用NOR闪存时所需要的MTD要相对少一些,许多厂商都提供用于NOR闪存的更高级软件,这其中包括M-System的TrueFFS驱动,该驱动被Wind River System、Microsoft、QNX Software System、Symbian和Intel等厂商所采用。
Linux-Nor Flash驱动分析
一、Linux Flash驱动结构
1、Linux MTD系统层次
在Linux系统中,提供了MTD(内存技术设备)系统来建立Flash针对Linux的统一、抽象的接口。
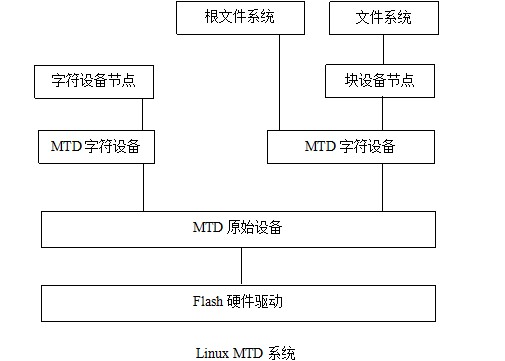
在引入MTD后,Linux系统中Flash设备驱动及接口可分为4层,从上到下依次是:设备节点、MTD设备层、MTD原始设备层和硬件驱动层。如下所示:
1) 设备节点:通过mknod在/dev子目录下建立MTD字符设备节点(主设备号为90)和MTD块设备节点(主设备号为31),用户通过访问此设备节点即可访问MTD字符设备和块设备。
2) MTD设备层:分为MTD字符设备(mtdchar.c)和MTD块设备(mtdblock.c),建立在MTD原始设备层之上,为应用程序提供访问Flash的接口。
3) MTD原始设备层:MTD原始设备层由两部分组成,一部分是MTD原始设备的通用代码,另一部分是各个特定的Flash的数据,例如分区。
4) 硬件驱动层:Flash 硬件驱动层负责Flash硬件设备的读、写、擦除。
2、Linux MTD系统接口
在引入MTD后,底层Flash驱动直接与MTD原始设备层交互,利用其提供的接口注册设备和分区。
mtd_info是表示MTD原始设备的结构体,每个分区也被认为是一个mtd_info。例如:如果有两个MTD原始设备,而每个上有3个分区,在系统中就共有6个mtd_info结构体,这些mtd_info的指针被存放在名为mtd_table的数组里。
struct mtd_info {
u_char type; /*内存技术的类型*/
u_int32_t flags; /*标志位*/
u_int32_t size; /*mtd设备的大小*/
u_int32_t erasesize; /*主要的擦除块大小*/
u_int32_t writesize; /*最小的可写单元的字节数*/
u_int32_t oobsize; /*OOB字节数*/
u_int32_t oobavail; /*可用的OOB字节数*/
char *name; /*分区的名字*/
int index; /*分区的索引号*/
struct nand_ecclayout *ecclayout; /*ECC布局结构体指针*/
//不同的erasesize的区域
int numeraseregions; /*不同的erasesize的区域的数目*/
struct mtd_erase_region_info *eraseregions;
//擦除函数
int (*erase) (struct mtd_info *mtd, struct erase_info *instr);
//读写函数
int (*read) (struct mtd_info *mtd, loff_t from, size_t len, size_t *retlen, u_char *buf);
int (*write) (struct mtd_info *mtd, loff_t to, size_t len, size_t *retlen, const u_char *buf);
//oob读写函数
int (*read_oob) (struct mtd_info *mtd, loff_t from,
struct mtd_oob_ops *ops);
int (*write_oob) (struct mtd_info *mtd, loff_t to,
struct mtd_oob_ops *ops);
//设备锁
int (*lock) (struct mtd_info *mtd, loff_t ofs, size_t len);
int (*unlock) (struct mtd_info *mtd, loff_t ofs, size_t len);
//电源管理函数
int (*suspend) (struct mtd_info *mtd);
void (*resume) (struct mtd_info *mtd);
//坏块管理函数
int (*block_isbad) (struct mtd_info *mtd, loff_t ofs);
int (*block_markbad) (struct mtd_info *mtd, loff_t ofs);
void *priv; /*私有数据*/
};
1) mtd_info的type字段给出底层物理设备的类型,包括MTD_RAM、MTD_ROM、MTD_NORFLASH、MTD_NANDFLASH等。
2) flags字段标志可以是MTD_WRITEABLE、MTD_BIT_WRITEABLE、MTD_NO_ERASE、MTD_POWERUP_LOCK等的组合。
3) mtd_info中的的read()、write()、read_oob()、write_oob()、erase()是MTD设备驱动要实现的主要函数。但是在NOR和NAND的驱动代码中几乎看不到mtd_info的成员函数,这是因为Linux在MTD的下层实现了针对NOR Flash和NAND Flash的通用的mtd_info成员函数。
Flash驱动中使用如下的两个函数注册和注销MTD设备:
int add_mtd_device(struct mtd_info *mtd);
int del_mtd_device (struct mtd_info *mtd);
mtd_part结构体用于表示分区(某一个分区),其mtd_info结构体成员用于描述该分区,它会被加入到mtd_table中。
struct mtd_part {
struct mtd_info mtd; //分区的信息
struct mtd_info *master; //该分区的主分区
u_int32_t offset; //该分区的偏移地址
int index; //分区号
struct list_head list;
int registered;
};
在MTD原始设备层中维护着一个mtd_part链表mtd_partitions(Flash的整个分区)。
struct mtd_partition {
char *name; //标识字符串
u_int32_t size; //分区大小
u_int32_t offset; //主MTD空间内的偏移
u_int32_t mask_flags; //掩码标志
struct nand_ecclayout *ecclayout; //OOB布局
struct mtd_info **mtdp;
};
Flash驱动中使用如下两个函数注册和注销分区:
int add_mtd_partitions(struct mtd_info *master,
const struct mtd_partition *parts,
int nbparts);
int del_mtd_partitions(struct mtd_info *master);
①add_mtd_partitions()会对每一个新建分区建立一个新的mtd_part结构体,将其加入mtd_partition中,并调用add_mtd_device()将此分区作为MTD设备加入mtd_table。
②del_mtd_partitions()的作用是对于mtd_partition上的每一个分区,如果它的主分区是master,则将它从mtd_partition和mtd_table中删除并释放掉,这个函数会调用del_mtd_device()。
二、NOR Flash驱动结构
在Linux系统中,实现了针对CFI(公共Flash接口)等接口的通用NOR驱动,这一层的驱动直接面向mtd_info的成员函数,这使得NOR的芯片级驱动变得非常的简单,只需要定义具体的内存映射情况结构体map_info并使用指定接口类型调用do_map_probe()。
NOR Flash驱动的核心是定义map_info结构体,它指定了NOR Flash的基址、位宽、大小等信息以及Flash的读写函数。
struct map_info {
char *name; /*NOR FLASH的名字*/
unsigned long size; /*NOR FLASH的大小*/
resource_size_t phys; /*NOR FLASH的起始物理地址*/
void __iomem *virt; /*NOR FLASH的虚拟地址*/
void *cached;
int bankwidth; /*NOR FLASH的总线宽度*/
//缓存的虚拟地址
void (*inval_cache)(struct map_info *, unsigned long, ssize_t);
void (*set_vpp)(struct map_info *, int);
};
NOR Flash驱动在Linux中实现非常简单,如下图所示:
①定义map_info的实例,初始化其中的成员,根据目标板的情况为name、size、bankwidth和phys赋值。
②如果Flash要分区,则定义mtd_partition数组,将实际电路板中Flash分区信息记录于其中。
③以map_info和探测的接口类型(如“cfi_probe”等)为参数调用do_map_probe(),探测Flash得到mtd_info。
三、NOR Flash驱动程序
需要说明的是,我用的是GQS3C2440的开发板,程序如下所示:
#include 《linux/module.h》
#include 《linux/init.h》
#include 《linux/kernel.h》 /*printk*/
#include 《asm/io.h》 /*ioremap*/
#include 《linux/types.h》 /*ARRAY_SIZE*/
#include 《linux/mtd/mtd.h》 /*mtd_info*/
#include 《linux/mtd/map.h》 /*map_info*/
#include 《linux/mtd/partitions.h》 /*mtd_partition*/
#define WINDOW_ADDR 0x00000000 /*NOR FLASH的物理地址*/
#define WINDOW_SIZE 0x00200000 /*NOR FLASH大小*/
#define BUSWIDTH 2 /*NOR FLASH总线宽度A0~A19*/
//探测的接口类型
#define PROBETYPES {“cfi_probe”,NULL}
//用于打印信息
#define MSG_PREFIX “S3C2440-NOR:”
static struct mtd_info *mymtd=0; /*定义MTD原始设备的结构体*/
//定义并初始化map_info结构体
struct map_info s3c2440nor_map={
.name = “NOR flash on S3C2440”, /*初始化NOR FLASH的名字*/
.size = WINDOW_SIZE, /*初始化NOR FLASH的大小*/
.bankwidth = BUSWIDTH, /*初始化NOR FLASH的位宽*/
.phys = WINDOW_ADDR, /*初始化NOR FLASH的物理地址*/
};
//MTD分区的信息
static struct mtd_partition static_partitions[]=
{
//bootloader存放的区域
{
.name = “U-boot”,
.size = 0x040000,
.offset= 0x0
},
};
static int mtd_parts_nb=0; /*定义分区数*/
static struct mtd_partition *mtd_parts=0; /*定义分区*/
static int __init s3c2440nor_init(void)
{
static const char *rom_probe_types[]=PROBETYPES; /*定义探测的接口类型*/
const char **type;
const char *part_type=0; //定义分区的类型
printk(KERN_NOTICE MSG_PREFIX“0x%08x at 0x%08x\n”,WINDOW_SIZE,WINDOW_ADDR);
//将NOR FLASH的物理地址映射为虚拟地址
s3c2440nor_map.virt=ioremap(WINDOW_ADDR,WINDOW_SIZE);
if(!s3c2440nor_map.virt)
{
printk(MSG_PREFIX“failed to ioremap\n”);
return -EIO;
}
//初始化read、copy_from、write、copy_to函数
simple_map_init(&s3c2440nor_map);
//探测NOR FLASH
type=rom_probe_types;
for(;!mymtd && *type;type++)
mymtd=do_map_probe(*type,&s3c2440nor_map);
//找到NOR FLASH
if(mymtd)
{
mymtd-》owner=THIS_MODULE;
mtd_parts=static_partitions; /*初始化分区*/
mtd_parts_nb=ARRAY_SIZE(static_partitions); /*得到分区数*/
part_type=“static”;
if(mtd_parts_nb==0)
printk(KERN_NOTICE MSG_PREFIX“no partition info available\n”);
else
{
printk(KERN_NOTICE MSG_PREFIX “using %s partition definition\n”,part_type);
add_mtd_partitions(mymtd,mtd_parts,mtd_parts_nb); /*注册分区*/
}
return 0;
}
return -ENXIO;
}
static void s3c2440nor_exit(void)
{
if(mymtd)
{
del_mtd_partitions(mymtd); //删除分区
map_destroy(mymtd); //注销mtd_info结构体
}
//取消虚拟地址的映射
iounmap((void *)s3c2440nor_map.virt);
}
module_init(s3c2440nor_init);
module_exit(s3c2440nor_exit);
MODULE_AUTHOR(“chenqi”);
MODULE_LICENSE(“GPL”);
结语
关于nand和nor的相关介绍就到这了,如有不足之处欢迎指正。
-
FlaSh
+关注
关注
10文章
1761浏览量
155938 -
存储器
+关注
关注
39文章
7758浏览量
172258
发布评论请先 登录
NAND Flash和NOR Flash的差别
NAND FLASH与NOR FLASH的技术对比
NOR型flash与NAND型flash的区别
NOR型flash与NAND型flash的区别
SPI NAND Flash和SPI NOR Flash的区别在哪里?
嵌入式Linux系统下NOR Flash的配置和使用
NAND Flash与NOR Flash的区别
NOR Flash和NAND FLASH的区别是什么
NAND Flash和NOR Flash的区别

从NOR Flash 到 NAND Flash 和SD NAND,从底层结构到应用差异




评论