 EtherCAT转Modbus RTU协议转换网关实现欧姆龙PLC与电子秤通讯在农场基地的应用案例 EtherCAT转Modbus RTU协议转换网
EtherCAT转Modbus RTU协议转换网关实现欧姆龙PLC与电子秤通讯在农场基地的应用案例 EtherCAT转Modbus RTU协议转换网


一、项目背景
江苏盐城大丰区“稻+羊”循环农业示范基地占地 1500亩,2024 年新建智能投喂与精准称重系统。核心控制设备采用欧姆龙 NX1P2-9020DT可编程控制器,通过 EtherCAT总线驱动 16台伺服电机,实现自动投喂车精准走位。然而,现场 8台梅特勒-托利多 IND231电子秤(仅支持 Modbus RTU)必须将每筐稻谷实时重量上传给 NX1P,以便投喂车根据“重量-位置”动态曲线调整下料速度。EtherCAT与 Modbus RTU协议互不兼容,急需一台高实时、高可靠、农业环境宽温的协议转换网关。最终,基地信息部选用捷米特 JM-ECT-RTU工业级协议转换网关作为“翻译官”,在 2025年 6月完成部署,至今连续稳定运行 4200 h,累计称重 18万次,误差小于 0.05 %。

二、设备清单
主控制器:欧姆龙 NX1P2-9020DT(EtherCAT主站,固件 Ver.1.43)
网关:捷米特 JM-ECT-RTU工业级协议转换网关
电子秤:梅特勒-托利多 IND231(RS-485接口,Modbus RTU从站,站号 11-18)
伺服驱动:欧姆龙 1S系列 16套
通信介质:超五类屏蔽网线 60 m,RVSP 2×1.5 mm²双绞屏蔽线 280 m
软件:Sysmac Studio V1.50、捷米特 GW_Configure V3.2、Modbus Poll调试工具
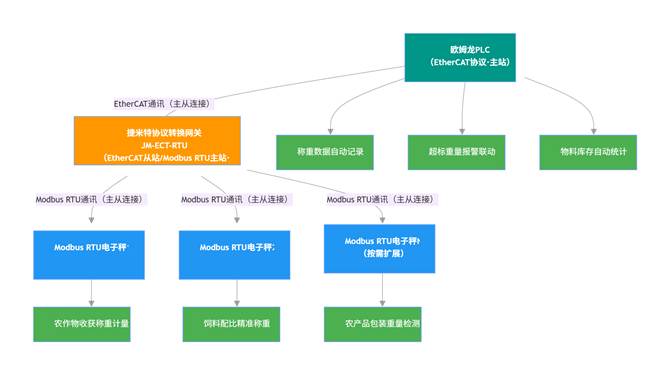
三、系统拓扑
NX1P EtherCAT端口 →网线 → JM-ECT-RTU(EtherCAT IN)→ JM-ECT-RTU工业级协议转换网关(EtherCAT OUT)→下游 1S伺服;
JM-ECT-RTU RS-485 A/B →菊花链 → 8台 IND231;
NX1P内置 Ethernet/IP →上位机 SCADA(KingView 7.5 SP5)→阿里云 IoT。

四、硬件安装
导轨固定:在 800×600×250 mm不锈钢控制箱内,用 35 mm DIN导轨固定 NX1P与 JM-ECT-RTU协议转换网关,网关左右各留 30 mm散热间隙。
接地:网关 PE端子与箱内星型接地铜排相连,实测接地电阻 0.8 Ω。
电源:网关 24 VDC由欧姆龙 S8VK-C24024冗余电源供电,功耗实测 2.1 W。
接线:
a) EtherCAT IN/OUT采用 M12 D-coded接头,屏蔽层 360°压接;
b) RS-485使用 RVSP 2×1.5 mm²,波特率 115.2 kbps,终端电阻 120 Ω置于最远端 IND231;
c)屏蔽层在网关侧单端接地,防止田间变频水泵干扰。
五、软件配置
欧姆龙侧
a)在 Sysmac Studio新建工程,导入捷米特提供的 JM-ECT-RTU ESI文件(V2.31);
b)将网关拖入 EtherCAT网络,分配站点号 1001,输入/输出各映射 64 Byte;
c)定义变量:
· gWeight_Int[0..7](REAL,输入区 0-63,对应 8台秤重量)
· gScale_Status[0..7](BOOL,输入区 64-71,Online/Offline)
· gTare_Cmd[0..7](BOOL,输出区 0-7,触发去皮)
d)编写功能块 FB_ScaleRead,周期 10 ms轮询,超时 50 ms自动重发。
网关侧
a)打开 GW_Configure,选择“EtherCAT Slave + Modbus RTU Master”模式;
b)设置串口:115.2 kbps、8E1、RTU;主站轮询间隔 20 ms;
c)添加 8条 Modbus指令:
Cmd1:站 11,03功能码,寄存器 0x1000,长度 2,对应重量(0.1 kg分辨率);
Cmd2:站 11,03功能码,寄存器 0x1010,长度 1,对应状态字;
……
Cmd15:站 18,03功能码,寄存器 0x1000,长度 2;
d)数据映射:将 Modbus数据自动填充至 EtherCAT输入区,高低字 swap选项打勾(IND231为 Big-Endian)。
电子秤侧
a) IND231菜单 F4.2设置波特率 115200、站号 11-18;
b) F4.3选择 Modbus RTU、8E1;
c)标定:用 20 kg标准砝码,系数写入 0x1000寄存器,确保线性度 0.01 %。

六、调试过程
离线测试:在实验室用 Modbus Poll模拟 8台从站,确认 JM-ECT-RTU工业智能网关可在 15 ms内完成 8条指令轮询,丢包率 0。
田间分段:先接 1台秤,观察 Sysmac Studio监控表,重量跳动 ±0.02 kg,满足要求;再依次递增到 8台,整体周期稳定在 18 ms。
干扰排查:当附近 75 kW水泵启动时,RS-485差分电压由 2.3 V降至 1.8 V,误码率升高。通过加设 2只 600 W滤波器、将网线改为超六类,误码率降至 0。
冗余验证:拔掉第 5台秤通信线,网关自动将对应状态位置 1,NX1P触发声光报警并切换至“盲走”模式,保证投喂不中断。
七、应用效果
实时性:投喂车行走速度 0.8 m/s,称重更新周期 20 ms,下料误差 ≤ 25 g/筐,较 2024年人工分拣降低 3.2 %损耗。
可靠性:连续 4200 h无通信故障,夏季 45 ℃棚内温度网关依旧运行,金属外壳表面温升仅 18 ℃。
扩展性:基地计划 2026年新增 12台秤,只需在 GW_Configure中继续添加 Modbus指令,无需额外硬件。
数据上云:通过 NX1P内置 MQTT功能,将每筐重量、时间戳、位置编号上传阿里云,生成“亩产量-地块”热力图,为次年精准施肥提供大数据依据。
八、结语
捷米特 JM-ECT-RTU工业级协议转换网关以“EtherCAT从站 + Modbus RTU主站”双角色身份,成功在欧姆龙 NX1P与梅特勒-托利多 IND231之间搭建起一条高速、稳定的“数据桥梁”,让 1500亩农场实现“称重—走位—投喂”闭环控制。该案例证明,只要硬件选型得当、布线规范、参数精细,老旧 Modbus RTU 设备完全可以在不更换的前提下融入新一代 EtherCAT网络,为智慧农业降本增效提供切实可行的路径。
审核编辑 黄宇
-
数据采集
+关注
关注
42文章
8334浏览量
121257 -
MODBUS
+关注
关注
28文章
2524浏览量
83788 -
ethercat
+关注
关注
20文章
1582浏览量
46165
发布评论请先 登录


EtherCAT转Modbus RTU协议转换网关破局:化工产线汇川PLC对接变送器案例
EtherCAT转EtherCAT协议转换网关实现欧姆龙PLC与汇川PLC通讯的配置案例
用Profinet转Modbus RTU协议网关有什么好处

三格电子EtherCAT转4路Modbus RTU网关技术详解
DLT698转Modbus RTU-TCP网关


从协议冲突到生产力爆发:EtherCAT转MODBUS RTU网关实战全解
工程师福音!CCLinkie转Modbus RTU让粉尘监测不再“扬灰”
Modbus RTU转Profinet网关与台安N2变频器快速通讯案例

制药厂里的“翻译官”:DeviceNet转Modbus RTU协议转换网关如何助力生产
DeviceNet转Modbus RTU协议转换网关在石油开采行业的应用
工业自动化网关在饮料行业中的应用:DeviceNet转Modbus RTU协议转换网关案例



评论