 Trinamic推出首款闭环PANdrive,可实现可靠的电机和运动控制
Trinamic推出首款闭环PANdrive,可实现可靠的电机和运动控制

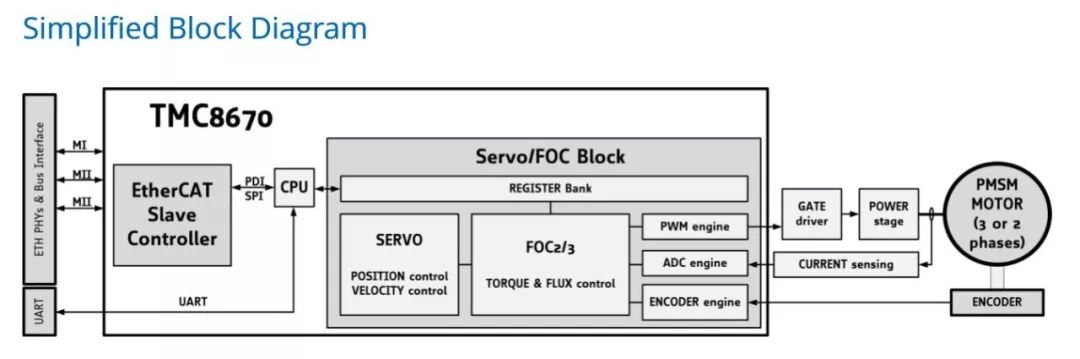
TMC8670是一款磁场定向控制(FOC)伺服控制器,具有CANopen over EtherCAT?协议栈,可以比任何基于软件的解决方案都更快地处理实时关键任务。
2018年8月13日,德国汉堡,TRINAMIC运动控制公司结合了TMC8670的所有优势:它集成了所有算法,可实现高端,快速的磁场定向控制和高性能实时现场总线接口。 TMC8670适用于三相BLDC和BLAC电机以及两相步进电机,融合了数十年的电机控制经验。
“我们看到EtherCAT在嵌入式自动化领域获得了相关性,该领域严格的空间限制推动了小型化的发展” Trinamic的创始人兼首席执行官Michael Randt解释道, “该组件在设计时考虑到了精确和动态的机器人驱动,其中控制器和伺服驱动器分布在接头中。自从我们几年前为KUKAs制造驱动电子设备以来,越来越多的小型,分散式机器人设计出现在市场上,此类机器人需要节省空间和高性能的解决方案。“TRINAMIC 运动控制公司结合了TMC8670的所有优势:它集成了所有算法,可实现高端,快速的磁场定向控制和高性能实时现场总线接口。 TMC8670适用于三相BLDC和BLAC电机以及两相步进电机,融合了数十年的电机控制经验。
TMC8670是一款用于机器人,制造和自动化的单轴嵌入式伺服控制器,设计工作电压为1.2V至3.3V。 TMC8670具有SPI-ADC接口,位置插值器和不同的位置传感器接口,是一种高性能构建模块,可实现仅具有几个组件的实时伺服控制器。它适用于机器人和工业自动化以及嵌入式运动控制系统中使用的典型编码器。
凭借包含空间矢量脉冲宽度调制(SVPWM)的PWM引擎,该集成电路适用于要求苛刻的低电感电机和最高动态定位任务。由于所有控制环路都在专用硬件中实现,因此TMC8670可以比任何基于软件的解决方案更快地执行实时关键任务,并将开发时间降至最低。
TMC8670-BI采用FCSG325(11x11)封装。该器件和评估板TMC8670-EVAL可从2018年9月开始发货。该器件符合-40°C至125°C汽车级温度规范。
特点和效益:
磁场定向控制(FOC)伺服控制器
扭矩控制(FOC),速度控制,位置控制
传感器引擎(霍尔模拟/数字,编码器模拟/数字)
支持3相PMSM和2相步进电机
PWM引擎,包括SVPWM
具有CoE协议CiA 402驱动器配置文件的EtherCAT®接口
UART接口
-
电机
+关注
关注
145文章
9716浏览量
154916 -
运动控制
+关注
关注
5文章
840浏览量
34693
原文标题:【世说芯品】Trinamic推出专用的EtherCAT运动控制器
文章出处:【微信号:Excelpoint_CN,微信公众号:Excelpoint_CN】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
BLDC芯片(MDF101A)丨高精度、低噪音、高效率的水下推进控制方案
运动控制卡稳定选型:CSNP1GCR01-AOW 工业级可靠应用解析
单轴/多轴 Trinamic 电机驱动模块怎么选?

高压功率放大器在超声电机性能测试与闭环实验中的应用

医疗设备里的 “稳” 选手:Trinamic 精准控制有多强?

Trinamic 芯片的微步设置对精度影响多大?

Trinamic步进电机驱动芯片有哪些优点?
Trinamic步进电机驱动芯片有哪些优点?
e络盟与 Analog Devices 共同举办ADI Trinamic 智能控制方案在线研讨会

TMC5041:单芯片双轴步进电机驱控方案,赋能精密静音运动控制

采用MT6835绝对式磁编码器实现高精度闭环步进电机控制
基于MT6835磁编码器IC的步进电机全闭环伺服控制策略
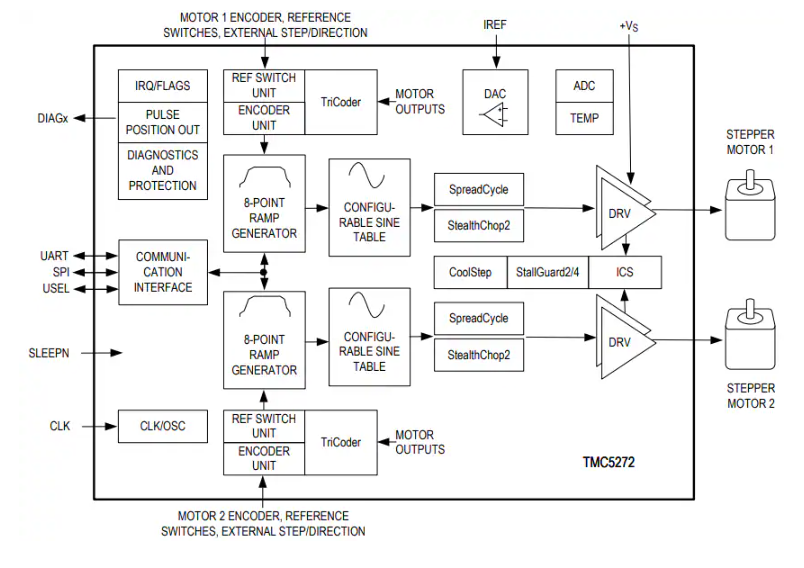
ADI Trinamic TMC5272步进电机控制器数据手册
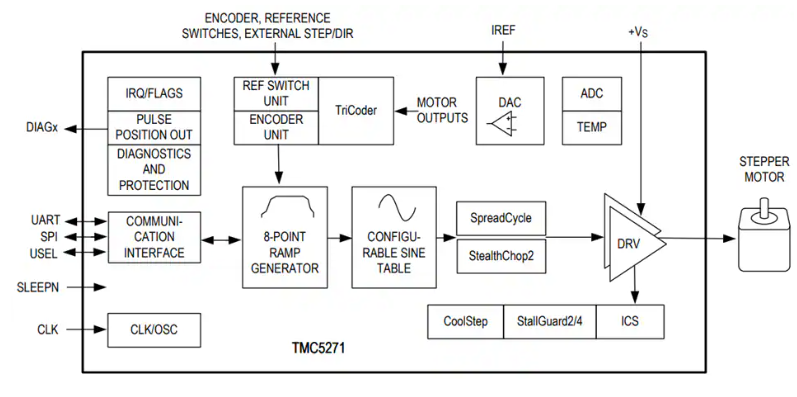
ADI Trinamic TMC5271步进电机控制器数据手册



评论