 拳力以赴!基于 RT-Thread 与瑞萨 VisionBoard 的 AIoT 猜拳系统实战 | 技术集结
拳力以赴!基于 RT-Thread 与瑞萨 VisionBoard 的 AIoT 猜拳系统实战 | 技术集结

本项目的题目为: 石头剪刀布猜拳识别。本项目实现了基本猜拳识别、根据识别 猜拳结果,与机器内的手势对比,根据结果控制舵机的行为,并且将识别的结果同步显示在上位机。
目录
项目概述
硬件清单
舵机控制引脚
软件与运行环境
固件编译
创建数据集
模型训练
代码结构与主要函数
使用方法
常见问题
项目源码
1 项目概述
目标: 在3秒以内识别猜拳的结果,并且根据猜拳输赢控制舵机旋转,将识别结果显示在上位机
平台: 瑞萨visionboard(摄像头、GPIO)
核心思路:
通过瑞萨visionboard采集照片数据作为数据集进行模型训练
将采集的数据集通过edge impulse进行训练
使用mqttx接受来自瑞萨visionboard的识别数据
根据识别猜拳结果控制舵机行为
使用手册: RA8D1 Group User’s Manual: Hardware(https://www.renesas.cn/zh/document/mah/ra8d1-group-users-manual-hardware?r=25456556)
使用烧写工具: Renesas Flash Programmer V3.12(https://en.freedownloadmanager.org/Windows-PC/Renesas-Flash-Programmer.html)
openmv固件: openmv固件(https://github.com/RT-Thread-Studio/sdk-bsp-ra8d1-vision-board)
2 硬件清单
瑞萨visionboard开发板(摄像头)
摄像头(RGB565,工作分辨率 320×240,ov5640)
360度 SG90舵机
3 舵机控制引脚
P008 —> 舵机
P008地址: 0x4040_0000 + 0x0020 × m(参考RA8D1 Group User’s Manual: Hardware 655页)
4 软件与运行环境
openmv固件(https://github.com/RT-Thread-Studio/sdk-bsp-ra8d1-vision-board)
主要依赖: sensor、time、tf、network、uctypes
5 固件编译
从github(https://github.com/RT-Thread-Studio/sdk-bsp-ra8d1-vision-board)仓库上将代码拉取到本地
运行链接脚本后,进入到 sdk-bsp-ra8d1-vision-board-master\projects\vision_board_openmv,打开 RT-Thread Env Tool,输入 scons —target=mdk5
项目生成后在C++ 预处理加上MICROPYTHON_USING_UCTYPES 的 define
(可以在sdk-bsp-ra8d1-vision-board-master\projects\vision_board_openmv\packages\micropython-v1.13.0\port\mpconfigport.h查看定义),
编译后在objects文件夹下得到rtthread.hex的openmv固件
使用Renesas Flash Programmer V3.12 烧写固件,将 Enable address check of program file 选项去除勾选
6 创建数据集
使用瑞萨visionboard进行训练图片采集,这样可以保持输入输出 的一致,一定程度上提高了识别的准确率。
importsensor, image, time, ossensor.reset()sensor.set_pixformat(sensor.RGB565)sensor.set_framesize(sensor.QVGA) #320x240sensor.set_windowing((240,240))sensor.skip_frames(time=2000)img_counter=0whileTrue: img= sensor.snapshot() filename="/dataset/scissors/scissors_img_%03d.jpg"% img_counter img.save(filename) print("Saved:", filename) img_counter+=1 time.sleep_ms(500)ifimg_counter >=550: # 停止条件break
运行时需要插入sd卡,并且提前创建对应的文件夹
7 模型训练
使用edge impulse训练模型, 使用Transfer learning,图片大小为240*240,训练时将图片输入改为灰度,减少干扰
8 代码结构与主要函数
mqttx:
def publish(self, topic, msg, retain=False, qos=0): 发送消息到mqttx
defpublish(self, topic, msg, retain=False, qos=0): pkt= bytearray() # MQTT publish header header=0x30 ifretain: header|=0x01 ifqos ==1: header|=0x02 elifqos ==2: header|=0x04 pkt.append(header) # 计算剩余长度 remaining_length=2+ len(topic) + len(msg) ifqos >0: remaining_length+=2 # 包含packet id # 先编码剩余长度 defencode_len(length): encoded= bytearray() whileTrue: digit= length %128 length= length //128 iflength >0: digit|=0x80 encoded.append(digit) iflength ==0: break returnencoded pkt+= encode_len(remaining_length) # 主题 pkt+= struct.pack("!H", len(topic)) + topic # qos>0时需要packet id ifqos >0: pkt+= struct.pack("!H",1) # packet id固定为1,可改 pkt+= msg self.sock.write(pkt)
def connect(self, clean_session=True): 连接到mqttx
defconnect(self, clean_session=True): addr = socket.getaddrinfo(self.server, self.port)[0][-1] self.sock = socket.socket() self.sock.connect(addr) pkt =bytearray(b"\x10") # CONNECT packet type var_header =bytearray(b"\x00\x04MQTT\x04") # Protocol Name + Level flags =0 ifclean_session: flags |=0x02 var_header.append(flags) var_header += struct.pack("!H", self.keepalive) payload = struct.pack("!H",len(self.client_id)) + self.client_id remaining_length =len(var_header) +len(payload) # MQTT剩余长度编码(可能大于127字节,需要多字节编码) defencode_len(length): encoded =bytearray() whileTrue: digit = length %128 length = length //128 iflength >0: digit |=0x80 encoded.append(digit) iflength ==0: break returnencoded pkt += encode_len(remaining_length) pkt += var_header pkt += payload self.sock.write(pkt) resp = self.sock.read(4) ifnot resporresp[0] !=0x20orresp[1] !=0x02: raiseMQTTException("Invalid CONNACK") ifresp[3] !=0: raiseMQTTException("Connection refused, code: %d"% resp[3])
WIFI
def connect_wifi(SSID, PASSWORD): WIFI连接
def connect_wifi(SSID, PASSWORD): wlan = network.WLAN(network.STA_IF) wlan.active(True) wlan.connect(SSID, PASSWORD) connect_times =0 whilenot wlan.isconnected(): print('Trying to connect to "{:s}"...'.format(SSID)) time.sleep_ms(1000) connect_times +=1 if connect_times >5: print(f"Connect to {SSID} failed.") return False print("WiFi Connected ", wlan.ifconfig()) return wlan.ifconfig()
手势识别
初始化
def__init__(self): self.net =None self.lables =None self.WIFIConnectStatus = GestureRecoginze.connect_wifi("IQOO Neo 6","x31415926y") self.MqttxClient =None self.MqttxConnectStatus =False ifself.WIFIConnectStatus: self.MqttxClient = MQTTClient("openmv","broker.hivemq.com", port=1883) self.MqttxConnectStatus =True try: self.MqttxClient.connect() self.MqttxClient.subscribe("openmv/test") except: print("connect to MQTTx failed.") self.MqttxConnectStatus =False self.MqttxClient.set_callback(lambdatopic, msg:print(topic, msg)) self.servo = Servo360(0x40400000,8) """ 初始化摄像头 """ sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.set_windowing((240,240)) # Set 240x240 window. sensor.skip_frames(time=2000) # Let the camera adjust. """ 加载模型 """ try: # load the model, alloc the model file on the heap if we have at least 64K free after loading self.net = tf.load("trained.tflite", load_to_fb=uos.stat('trained.tflite')[6] > (gc.mem_free() - (64*1024))) exceptExceptionase: print(e) raiseException('Failed to load "trained.tflite", did you copy the .tflite and labels.txt file onto the mass-storage device? ('+str(e) +')') try: self.labels = [line.rstrip('\n')forlineinopen("labels.txt")] exceptExceptionase: raiseException('Failed to load "labels.txt", did you copy the .tflite and labels.txt file onto the mass-storage device? ('+str(e) +')')
识别主体
defMainAction(self, comparetimes): clock = time.clock() compare_times =0 start_time =None CompareResultShow =None compare_result =None while(compare_times clock.tick() img = sensor.snapshot() results = self.net.classify(img, roi=(0,0, img.width(), img.height()), scale_mul=0, x_overlap=0, y_overlap=0) obj = results[0] scores = obj[4] predictions_list =list(zip(self.labels, scores)) predictions_max =0 predictions_num =None foriinrange(len(predictions_list)): label, score = predictions_list[i] ifscore > predictions_max: predictions_max = score predictions_num = label print("%s = %f"% (label, score)) img.draw_string(0,0,"Predictions: %s"% predictions_num, mono_space=False, scale=2) ifstart_timeisNone: start_time = time.ticks_ms() iftime.ticks_diff(time.ticks_ms(), start_time) >5000: ifpredictions_max >0.90: machines_gesture = random.randint(0,2) ifmachines_gesture ==0:# rock ifpredictions_num =="rock": compare_result ="draw" elifpredictions_num =="paper": compare_result ="win" else: compare_result ="lose" elifmachines_gesture ==1:# paper ifpredictions_num =="rock": compare_result ="lose" elifpredictions_num =="paper": compare_result ="draw" else: compare_result ="win" else:# scissors ifpredictions_num =="rock": compare_result ="win" elifpredictions_num =="paper": compare_result ="lose" else: compare_result ="draw" ifself.WIFIConnectStatus: self.MqttxClient.publish("openmv/test", ujson.dumps({"compare_times": compare_times, "machine_label":self.RPS[machines_gesture], "label": predictions_num, "score": predictions_max, "compare_result": compare_result})) ifcompare_result =="win": self.servo.run(1,1)#正转一秒 else: self.servo.run(-1,1) print(compare_times) start_time = time.ticks_ms() CompareResultShow = time.ticks_ms() compare_times +=1 else: print("get_ready......") ifCompareResultShowisnotNoneandtime.ticks_diff(time.ticks_ms(), CompareResultShow) < 2500: img.draw_string(0, 20, "machines_gesture: %s" % self.RPS[machines_gesture], mono_space=False, scale=2) img.draw_string(0, 40, "compare result: %s" % compare_result, mono_space=False, scale=2) else: CompareResultShow = None img.draw_string(0, 20, "get_ready......", mono_space=False, scale=2) print(clock.fps(), "fps")
9 使用方法
前置条件
在光线充足,设置一个白色的识别背景
确保wifi、mqttx可以连接
使用
将开发板置于手的正上方20-30cm处,经过5s将会识别一次,比对后会将结果显示在 屏幕上2.5s,对比5次之后识别结束
10 常见问题
在某些情况下识别错误: 确保光线充足,与开发板的距离适当
无法在mqttx上获取识别结果: 确保WIFI是否存在,密码是否正确
-
RT-Thread
+关注
关注
32文章
1638浏览量
45202 -
机器识别
+关注
关注
1文章
15浏览量
2683 -
AIoT
+关注
关注
8文章
1678浏览量
34276
发布评论请先 登录
基于RT-Thread与瑞萨 VisionBoard 的多功能电机驱动器开发 | 技术集结

国产操作系统再“超越”,RT-Thread推动AIoT产业变革
RT-Thread编程指南
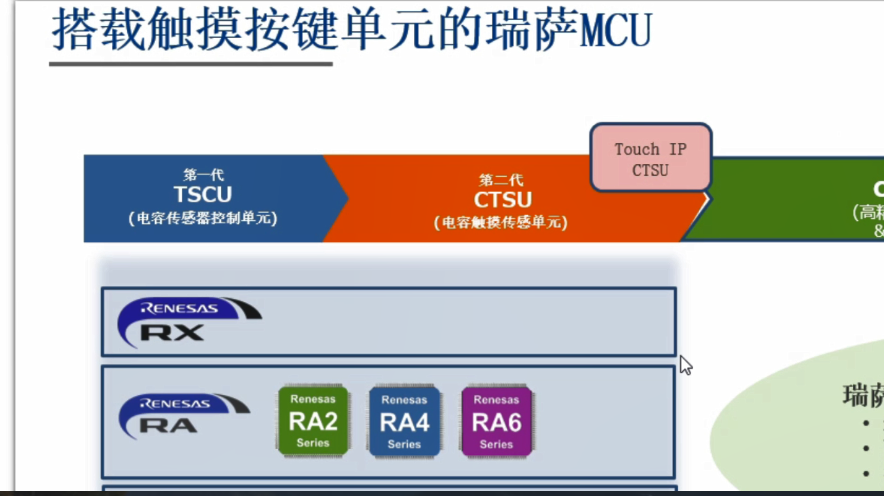
RT-Thread全球技术大会:瑞萨的解决方案、产品阵容以及四大核心技术介绍
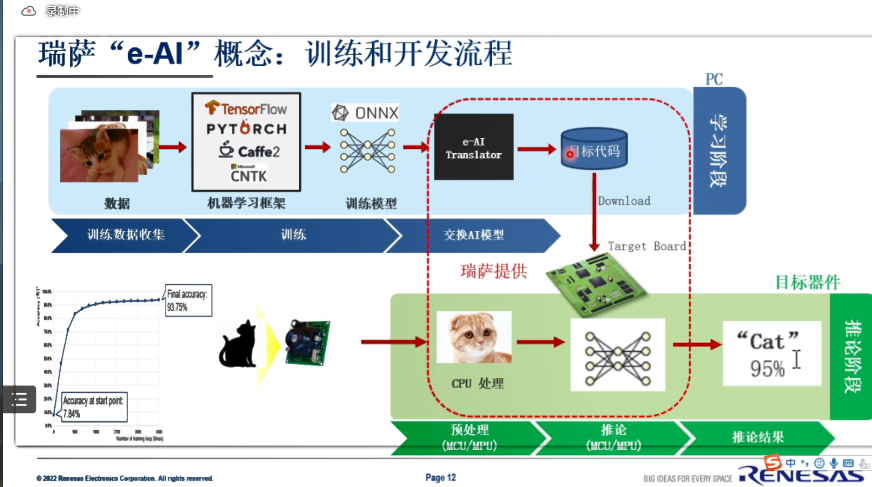
RT-Thread全球技术大会:关于瑞萨“e-AI”概念的训练和开发流程
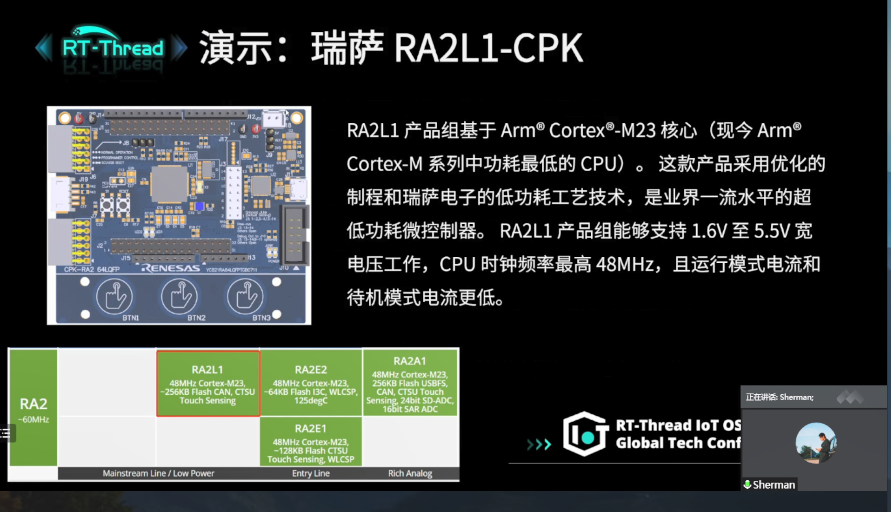
RT-Thread全球技术大会:关于瑞萨RA2L1-CPK低功耗CPU演示
瑞萨电子正式成为RT-Thread金牌会员:进一步加速RA生态发展

瑞萨Cortex-M内核RA MCU的RT-Thread BSP制作教程发布
【议程发布】10月上海线下培训:RT-Thread × 瑞萨 工业监视器+HMI解决方案!

使用SystemView工具分析瑞萨RA6M4芯片上RT-Thread的运行情况

瑞萨电子全球VP莅临RT-Thread指导交流

瑞萨电子亮相RT-Thread 20周年开发者大会
2026 RT-Thread全球技术大会演讲征集开始啦!| 技术集结



评论